splat专题
LSS (Lift, Splat, Shoot)代码解析
文章目录 论文研究背景算法实现过程梳理一、相关参数设置二、模型相关参数三、算法前向过程 论文研究背景 LSS是一篇发表在ECCV 2020上有关自动驾驶感知方向的论文,具体子任务为object segmentation and map segmentation。论文和官方repo如下: 论文:https://link.zhihu.com/?target=https%3A//ar
论文复现《SplaTAM: Splat, Track Map 3D Gaussians for Dense RGB-D SLAM》
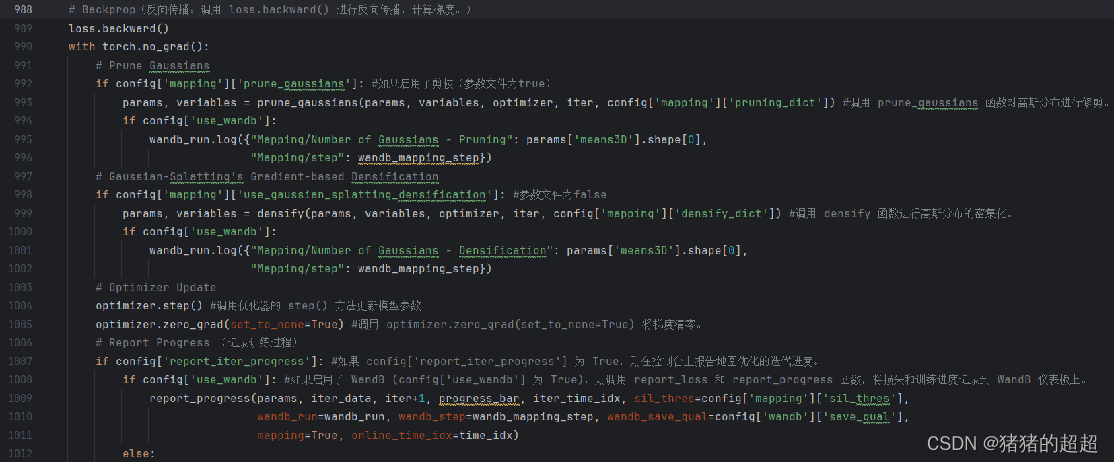
前言 SplaTAM算法是首个开源的基于RGB-D数据,生成高质量密集3D重建的SLAM技术。 通过结合3DGS技术和SLAM框架,在保持高效性的同时,提供精确的相机定位和场景重建。 代码仓库:spla-tam/SplaTAM: SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM (CVPR 2024) (githu
【论文笔记】Lift-Attend-Splat: Bird’s-eye-view camera-lidar fusion using transformers
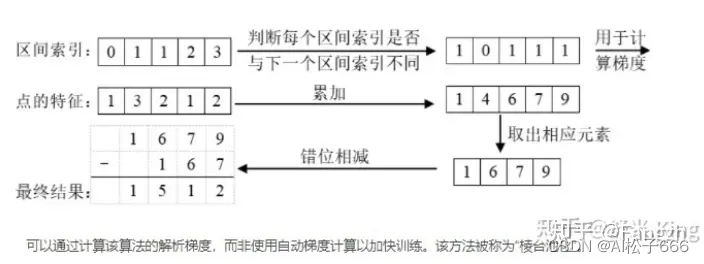
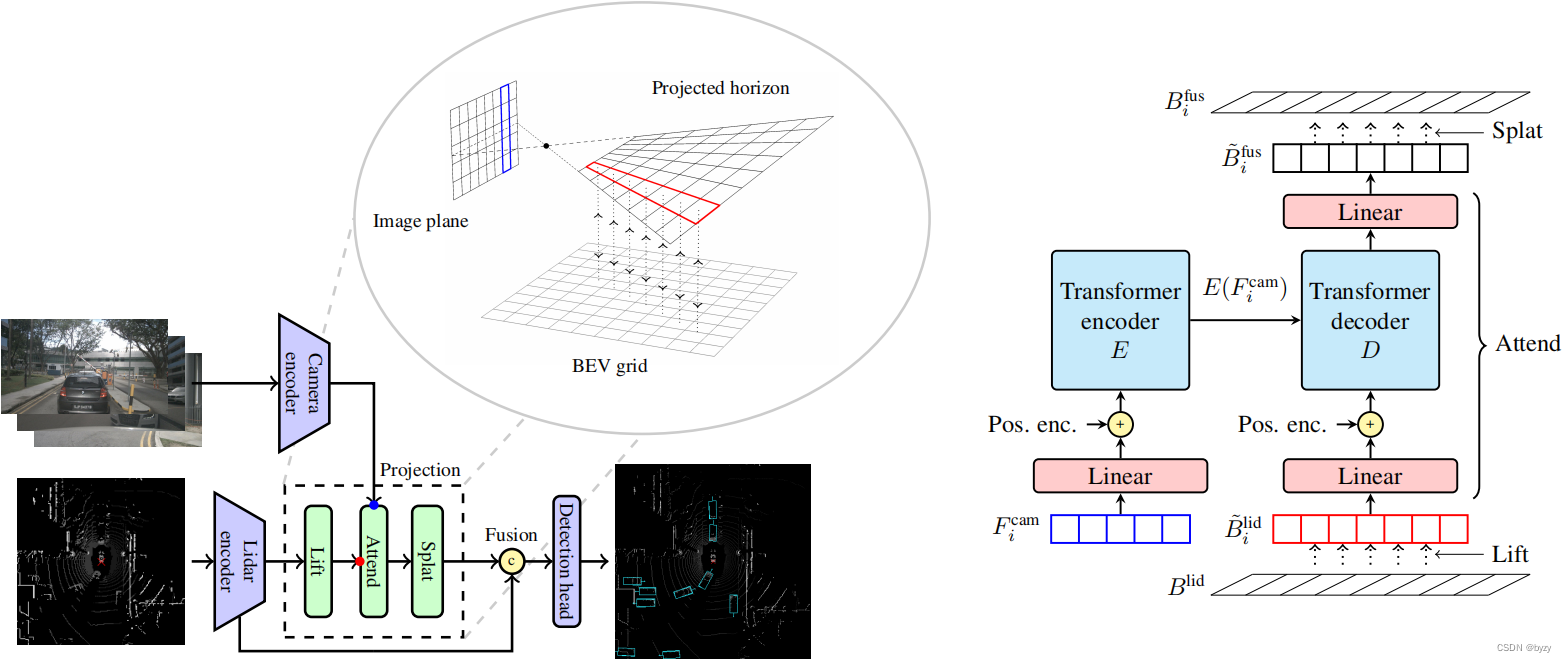
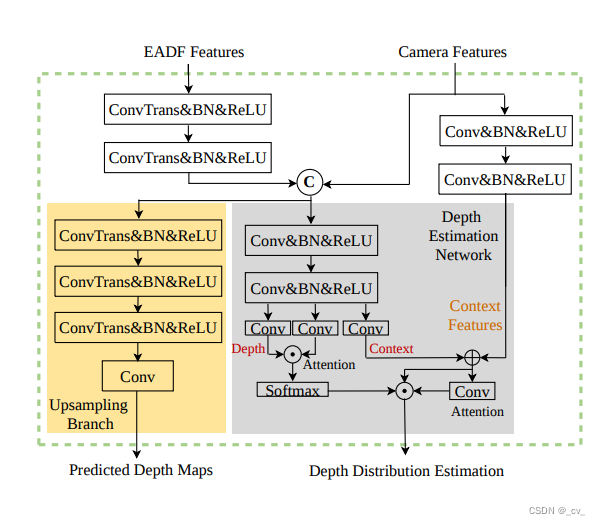
原文链接:https://arxiv.org/abs/2312.14919 1. 引言 多模态融合时,由于不同模态有不同的过拟合和泛化能力,联合训练不同模态可能会导致弱模态的不充分利用,甚至会导致比单一模态方法性能更低。 目前的相机-激光雷达融合方法多基于Lift-Splat,即基于深度估计投影图像特征到BEV,再与激光雷达特征融合。这高度依赖深度估计的质量。本文发现深度估计不能为这些
Lift-Attend-Splat
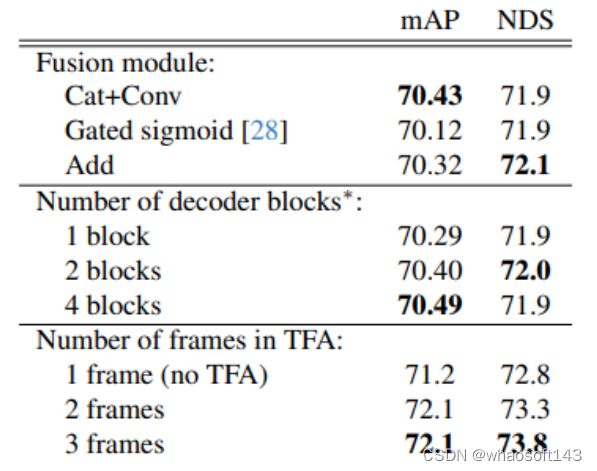
此文转载于大佬哦~~ 感谢 最新BEV LV融合方案 论文:Lift-Attend-Splat: Bird’s-eye-view camera-lidar fusion using transformers 链接:https://arxiv.org/pdf/2312.14919.pdf 结合互补的传感器模态对于为自动驾驶等安全关键应用提供强大的感知至关重要。最近最先进的自动驾驶相机-激光雷
BEV(1)---lift splat shoot
1. 算法简介 1.1 2D坐标与3D坐标的关系 如图,已知世界坐标系上的某点P(Xc, Yc, Zc)经过相机的内参矩阵可以获得唯一的图像坐标p(x, y),但是反过来已知图像上某点p(x, y),无法获得唯一的世界坐标(只能知道P在Ocp这一射线上),只有当深度坐标Zc已知时,我们才可求得唯一的世界坐标P,因此2D坐标往3D坐标的转换多围绕Zc的获取展开。 1.2 LSS原理 LSS
【nuScenes SOTA】EA-LSS:Edge-aware Lift-splat-shot Framework for 3D BEV Object Detection个人解析
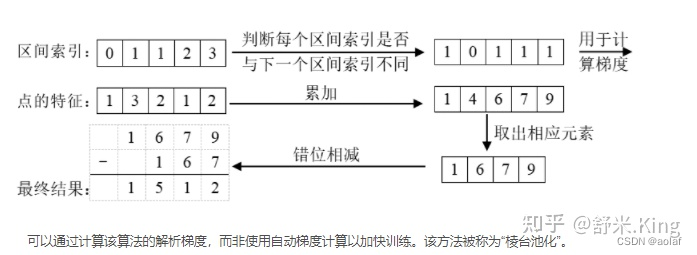
文章目录 重点Fine-grained Depth ModuleEdge-aware Depth Fusion Module 重点 这篇文章最主要就是提出来两个模块,如上图所示,一个是FGD Module(Fine-grained Depth Module),另一个是EADF Module(Edge-aware Depth Fusion Module) Fine-g
Lift, Splat, Shoot图像BEV安装与模型代码详解
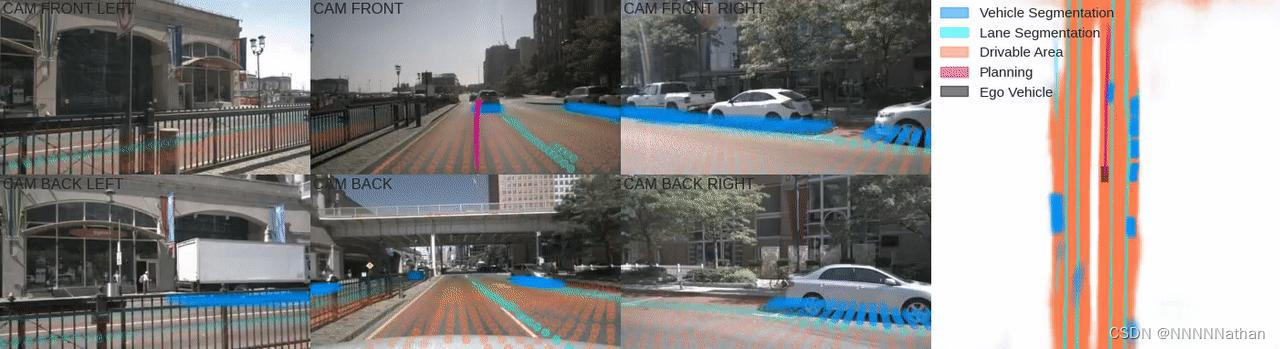
左侧6帧图像为不同的相机帧,右侧为BEV视角下的分割与路径规划结果 由于本人才疏学浅,解析中难免会出现不足之处,欢迎指正、讨论,有好的建议或意见都可以在评论区留言。谢谢大家! 专栏地址:https://blog.csdn.net/qq_41366026/category_11640689.html?spm=1001.2014.3001.5482 1 前言 计算机视觉算
【LSS】Lift, Splat, Shoot: Encoding Images from Arbitrary Camera Rigs by Implicitly Unprojecting to 3D
【LSS】Lift, Splat, Shoot: Encoding Images from Arbitrary Camera Rigs by Implicitly Unprojecting to 3D 1 摘要 现有的自动驾驶车辆的主要目标是从多个传感器抽取语义信息,并将这些语义信息融合成一个 BEV 坐标系下的特征图,然后进行运动规划。本文作者提出了一个方法,该方法将任意多的相机数据转化成B
【BEV感知 LSS方案】Lift-Splat-Shoot(LSS)
前言 LSS全称是Lift-Splat-Shoot,它先从车辆周围的多个摄像头拍摄到的图像进行特征提取,在特征图中估计出每个点的深度,然后把这些点“提升”到3D空间中。 接着,这些3D信息被放置到一个网格上,最后将这些信息“拍扁”到一个平面视图上,形成BEV特征图。 Lift,是提升的意思,2D → 3D特征转换模块,将二维图像特征生成3D特征,涉及到深度估计。Splat,是展开的意思,3

Lift, Splat, Shoot图像BEV安装与模型详解
1 前言 计算机视觉算法通常使用图像是作为输入并输出预测的结果,但是对结果所在的坐标系却并不关心,例如图像分类、图像分割、图像检测等任务中,输出的结果均在原始的图像坐标系中。因此这种范式不能很好的与自动驾驶契合。 在自动驾驶中,多个相机传感器的数据一起作为输入,这样每帧图像均在自己的坐标系中;但是感知算法最终需要在车辆自身坐标系(ego coordinate)中输出最终的预测结果;并提供给下游
Lift, Splat, Shoot图像BEV安装与模型详解
1 前言 计算机视觉算法通常使用图像是作为输入并输出预测的结果,但是对结果所在的坐标系却并不关心,例如图像分类、图像分割、图像检测等任务中,输出的结果均在原始的图像坐标系中。因此这种范式不能很好的与自动驾驶契合。 在自动驾驶中,多个相机传感器的数据一起作为输入,这样每帧图像均在自己的坐标系中;但是感知算法最终需要在车辆自身坐标系(ego coordinate)中输出最终的预测结果;并提供给下游

BEV经典之作Lift, Splat, Shoot解析
第一篇:LSS算法数据shape流程图 - 知乎 Lift Splat Shoot算法是一种用于自动驾驶感知的算法,它由NVIDIA提出。该算法通过将多视角相机图像转换为3D空间中的特征表示。其主要思想是将每个相机的图像通过"抬升(Lift)"的方式生成3D特征,然后将这些3D特征通过"拍扁(Splat)"的方式投射到光栅化的鸟瞰图网格中。最后,通过将模板运动轨迹"投射(Shoot)"到网络输出