siamese专题

NLP-文本匹配-2016:SiamseNet【Learning text similarity with siamese recurrent networks】
NLP-文本匹配-2016:SiamseNet【Learning text similarity with siamese recurrent networks】

【王树森】Few-Shot Learning (2/3): Siamese Network 孪生网络(个人向笔记)
Learning Pairwise Similarity Scores Training Data 训练集有很多个类别的图片,每个类别的图片都有标注 Positive Sample:我们需要正样本来告诉神经网路什么东西是同一类 Negative Sample:负样本可以告诉神经网路事物之间的区别 我们用CNN来提取图片的特征: 把两张图片用同一个CNN提取特征向量,然后把得到的

均值,白化,Siamese网络,双线性插值
减去均值,白化:在训练一个网络的时候我们经常会做对输入减去均值,以及白化等操作,其目的均是为了加快训练速度。关于原因一般我们输入的图像数据是高度相关的,假设其分布如下图a所示,由于初始化模型参数时,一般参数时0均值的,因此开始的拟合y=Wx+b基本是过原点的,如图b红色线所示,因此网络需要经过多次学习才能够达到如紫色实现的拟合,因此训练过程中模型的收敛速度慢。如果我们对输入的数据先做减均值操作,便

目标跟踪论文(五):Deeper and Wider Siamese Networks for Real-Time Visual Tracking
Deeper and Wider Siamese Networks for Real-Time Visual Tracking 简述: 基于孪生网络的跟踪器通常使用AlxcNet作为backbone,而没有充分利用现在深层网络的优势(比如ResNet、Inception等)。作者发现,如果直接将backbone换成ResNet、Inception等网络,随着深度的增加,效果不升反降,如下图蓝线

【SiamFC】《Fully-Convolutional Siamese Networks for Object Tracking》
ECCV 2016 Workshops 文章目录 1 Background and Motivation2 Related Work3 Advantages / Contributions4 Method5 Experiments5.1 Datasets and Metrics5.2 The OTB-13 benchmark5.3 The VOT benchmarks5.4 Dat

caffe官网教程中siamese例子,画特征错误提示及解决办法
这篇博客时承接上一篇画网络结构,在这里给大家一个网址,这个别人写的教程:http://blog.csdn.net/liumaolincycle/article/details/48531503,这个教程我相信对于没有使用Anaconda的同学会有帮助,好了下面介绍我遇到的问题及解决方法。 第一个问题就是:提示没有权限运行ipython notebook这个问题很好解决,相信大家都是只要加上
Learning by tracking:Siamese CNN for robust target association
来源:arXiv:1604.07866v3 Aug 2016 Abstract 本文介绍了一种新的数据关联的方法,引入两阶段(two-stage)学习的模式来匹配检测对。 First,训练了一个孪生卷积神经网络来学习编码两个输入图像块的之间的local spatio-temporal structures,把像素值和光流信息给聚合起来。 Second,一系列上下文特征derived fro
Siamese network 孪生神经网络--一个简单神奇的结构
1.名字的由来 Siamese和Chinese有点像。Siam是古时候泰国的称呼,中文译作暹罗。Siamese也就是“暹罗”人或“泰国”人。Siamese在英语中是“孪生”、“连体”的意思,这是为什么呢? 十九世纪泰国出生了一对连体婴儿,当时的医学技术无法使两人分离出来,于是两人顽强地生活了一生,1829年被英国商人发现,进入马戏团,在全世界各地表演,1839年他们访问美国北卡罗莱那州后来成

清华商汤上海AICUHK提出Siamese Image Modeling,兼具linear probing和密集预测性能!...
关注公众号,发现CV技术之美 本文分享论文『Siamese Image Modeling for Self-Supervised Vision Representation Learning』,由清华(黄高组)&商汤(代季峰组)&上海AI Lab&CUHK提出Siamese Image Modeling,兼具linear probing和密集预测性能! 详细信息如下: 论文链接:http:

Siamese Transformer Pyramid Networks for Real-Time UAV Tracking(论文翻译)
论文地址:https://arxiv.org/pdf/2110.08822.pdf Code:https://github.com/RISC-NYUAD/SiamTPNTracker 目录 摘要 1.引言 2.相关工作 2.1 轻量级网络 2.2 目标跟踪 3.提出的方法 3.1 特征提取网络 3.2 特征融合网络 3.3 Transformer金字塔网络 3.4 预
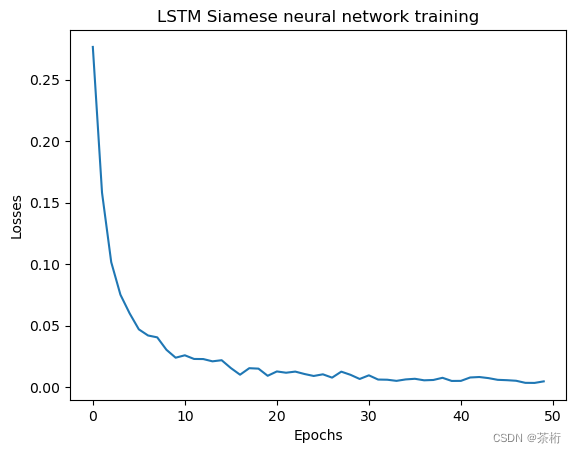
LSTM Siamese neural network
本文中的代码在Github仓库或Gitee仓库中可找到。 Hi, 你好。我是茶桁。 大家是否还记得,在「核心基础」课程中,我们讲过CNN以及LSTM。 卷积神经网络(CNN)已经在计算机视觉处理中得到广泛应用,不过,2017年开创性的Transformer神经网络的开创性使其称为一种可行的替代方案,Transformer是目前流行的ChatGPT的基础。它的主要缺点是需要大型数据集

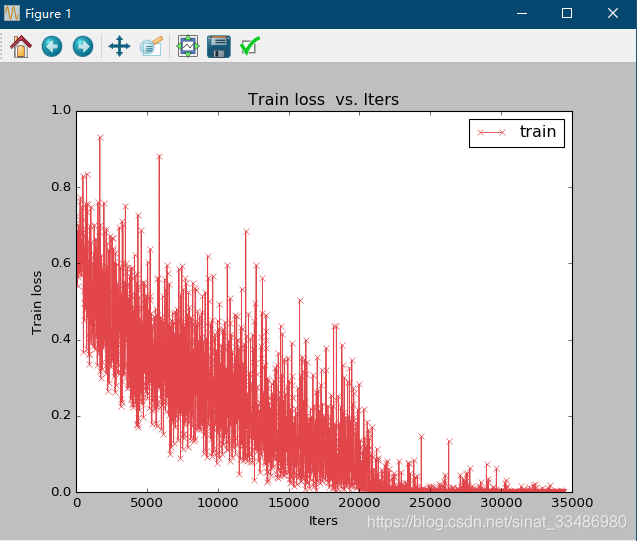
测试训练好的siamese网络
在这篇博客中https://blog.csdn.net/sinat_33486980/article/details/91440461 新训练了单分支的siamese网络。 参考了论文:Online Multi-Object Tracking with Historical Appearance Matching and Scene Adaptive Detection Filtering 结
caffe训练siamese网络(行人数据集)
参考博客:https://blog.csdn.net/gybheroin/article/details/54133556#commentsedit 环境:windows10 x64 ,caffe, cuda 10.1,cudnn 7.5 数据集:行人数据集 文件夹目录结构: ----------------------------------数据准备---------------

【SiamDW(CVPR2019)oral】论文阅读Deeper and Wider Siamese Networks for Real-Time Visual Tracking
Deeper and Wider Siamese Networks for Real-Time Visual Tracking 论文地址 代码 写在前面 又是一篇关于SiamRPN的改进,加深了网络宽度与深度,优化特征提取过程,效果很好。 Motivation 深度的网络如ResNet在其他视觉任务上都有很好的表现,然而却不能移植到目标跟踪领域中;网络太深导致最后特征的感受野太大,更加关注
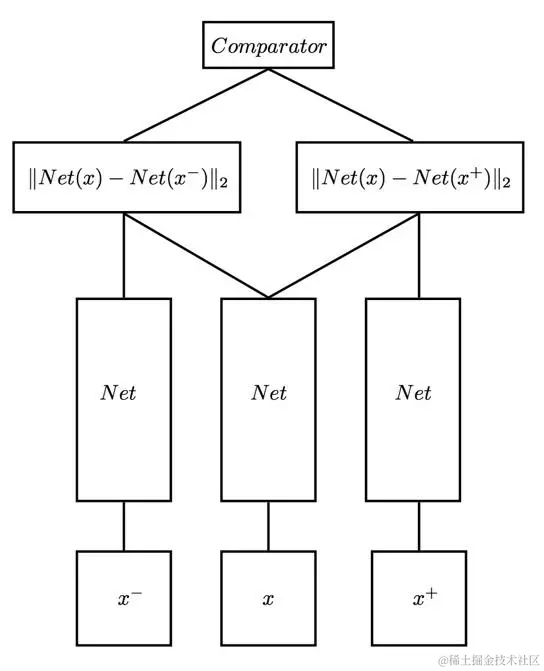
【TripletTracking(ECCV2018)】论文阅读 Triplet Loss in Siamese Network for Object Tracking
Triplet Loss in Siamese Network for Object Tracking 项目主页 写在前面 这篇文章发表在ECCV2018上,速度快,精度还行,但是个人感觉还是因为方法比较新才被接收的。这篇文章的思路其实很简单,很大的篇幅都是在解释triplet loss为什么管用,在这里就不详细描述这块内容,主要掌握一下思路,具体的公式以及可视化的比较可以去看论文。 Mot
Siamese网络与匈牙利算法在目标跟踪中的研究与应用
1. 引言 目标跟踪是计算机视觉领域中的一个重要研究方向,广泛应用于视频监控、智能交通、人机交互等领域。随着深度学习技术的不断发展,Siamese网络和匈牙利算法在目标跟踪领域的应用逐渐受到关注。本文将对Siamese网络与匈牙利算法以及其在目标跟踪中的应用进行综述和展望。 2. 目标跟踪算法概述 目标跟踪算法可以分为基于滤波的方法、基于深度学习的方法和混合方法等

SINT(Siamese Instance Search for Trancking)阅读笔记
理解有误,欢迎指正,转载请注明出处! 这是发表在CVPR2016上的一遍用深度学习做跟踪方向的文章,文章利用孪生网将跟踪问题与图像的匹配问题联系到一起。 论文链接 代码链接 文章的核心思想: 通过Siam网络学习一个匹配函数。在得到第一帧目标信息之后,接下来的每一帧的候选框都和第一帧目标框进行匹配度计算,得分最高的候选框即为该帧中目标。(好处:目标被遮挡之后不用担心无法找回,因为网络不更新,那
CVPR-2016-SINT:Siamese Instance Search for Tracking阅读笔记
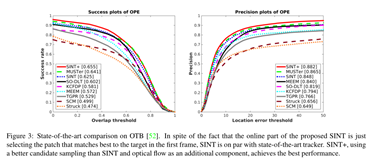
SINT阅读笔记 一、 动机二、 贡献三、 主要内容四、 实验结果五、 结论 论文地址: https://arxiv.org/pdf/1605.05863.pdf 论文代码地址: https://github.com/taotaoorange/SINT 一、 动机 建议学习匹配机制,而不是明确地为特定的行为建模 二、 贡献 ① 建议从外部视频数据中学习一个用于跟踪

keras的siamese(孪生网络)实现案例
keras的siamese(孪生网络)实现案例 更多python视频教程请到菜鸟教程https://www.piaodoo.com/ 代码位于keras的官方样例,并做了微量修改和大量学习?。 最终效果: import kerasimport numpy as npimport matplotlib.pyplot as plt import random

Learning to Fuse Asymmetric Feature Maps in Siamese Trackers论文解读
Learning to Fuse Asymmetric Feature Maps in Siamese Trackers 论文地址 代码地址,实际上根本没有 1. Introduction SiamRPN特点: SiamRPN formulates the tracking problem as one-shot detection. SiamRPN把追踪问题描述为小样本检测 Sia

UpdateNet:Leaning the Model Update for Siamese Trackers 【论文笔记】
写前bb 最近在一直纠结Siamrpn的复现,由于对RPN网络和目标框回归的过程不是很了解,希望这周能搞清楚并且复现出来吧。看到公众号有推送ICCV2019的论文集,瞅了眼发现这篇文章名字异常显眼,立马下下来看起来!搜了下网上好像已经有相关的阅读笔记(还是我看的晚一点),我也挤挤时间Markdown一下啦。 Abstract 目前,现有的更新模板策略一般是线性组合先前的几帧,这样会导致随着时
《Defect detection on new samples with siamese defect-aware attention network》论文阅读笔记
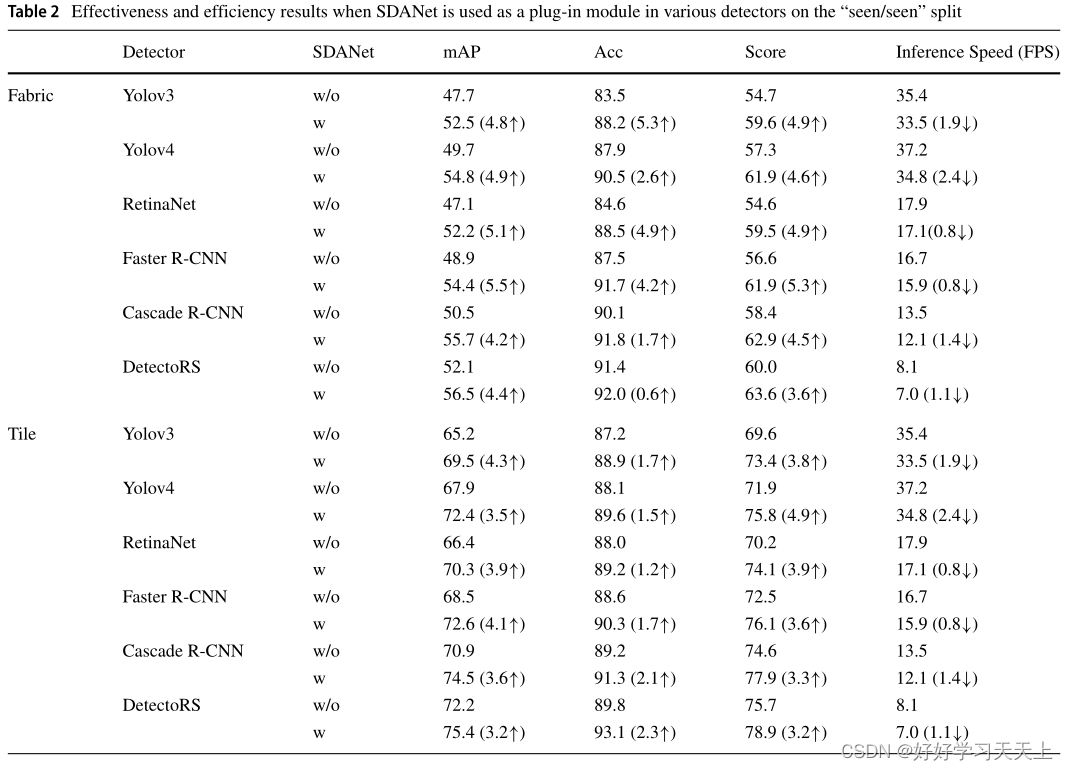
这篇文章2022年四月接受的。 摘要 目前基于深度学习的缺陷检测方法大多依赖于大规模的标注数据,无法使经过训练的深度学习模型适应训练期间未观察到的新样本。作者提出一种新的感知注意网络(SDANet),该网络具有模板比较检测策略,以匹配新样本,而无需快速收集新数据和重新训练模型。在SDANet中,使用连体特征金字塔网络从输入图像和模板图像中提取多尺度特征,提出缺陷感知注意模块以获取输入特征和模板
strict=False后还是报错RuntimeError: Error(s) in loading state_dict for Siamese:
1. 问题 我们知道通过 model.load_state_dict(state_dict, strict=False) 可以暂且忽略掉模型和参数文件中不匹配的参数,先将正常匹配的参数从文件中载入模型。 但在使用时遇到了这样一个报错: RuntimeError: Error(s) in loading state_dict for Siamese:size mismatch for fu

Siamese Box Adaptive Network for Visual Tracking --Siamban,CVPR2020单目标跟踪开源
论文链接 : http://xxx.itp.ac.cn/pdf/2003.06761v2.pdf 开源项目:https://github.com/hqucv/siamban 创新点:siamban框架 改进:准确估计目标的尺度和纵横比 由于RPN引入导致的参数复杂性 避免了很多超参数,更加灵活 Abstract 现有的跟踪器大多依赖于多尺度搜索方案或预定义的锚来精确估计目标的尺度和纵横比(t
Siamese Box Adaptive Network for Visual Tracking --Siamban,CVPR2020单目标跟踪开源
论文链接 : http://xxx.itp.ac.cn/pdf/2003.06761v2.pdf 开源项目:https://github.com/hqucv/siamban 创新点:siamban框架 改进:准确估计目标的尺度和纵横比 由于RPN引入导致的参数复杂性 避免了很多超参数,更加灵活 Abstract 现有的跟踪器大多依赖于多尺度搜索方案或预定义的锚来精确估计目标的尺度和纵横比(t

One Shot Learning(单样本学习) with Siamese Networks (孪生网络)using Keras
目录: 1.介绍 2.先验知识 3.classfication vs one shot leanrning 4.应用 5 omnilog 数据集 6.加载数据集 7.映射问题到二分类 8.模型的架构与训练 9.KNN模型 10.随机模型 11.测试结果和展望 12.结论 13.参考文献 1. 介绍 卷积神经网络是图像分类领域的最新方法可以说,但是卷积神经网络我们都知道需要非常庞大的数据集来支撑,