rtklib专题

rtklib.h : RTKLIB constants, types and function prototypes 解释
在 RTKLIB 中,rtklib.h 是一个头文件,包含了与 RTKLIB 相关的常量、类型和函数原型。以下是该头文件的一些常见内容和翻译说明: 1. 常量 (Constants) rtklib.h 中定义的常量通常包括: 系统常量: 例如,GPS、GLONASS、GALILEO 等系统的常量定义。 时间常量: 如一年、一天的秒数等。 精度常量: 如距离、速度的精度标准。 2. 类型
GSS7000卫星导航模拟器结合RTKLIB 接收NTRIP网络RTCM数据以输出RS232
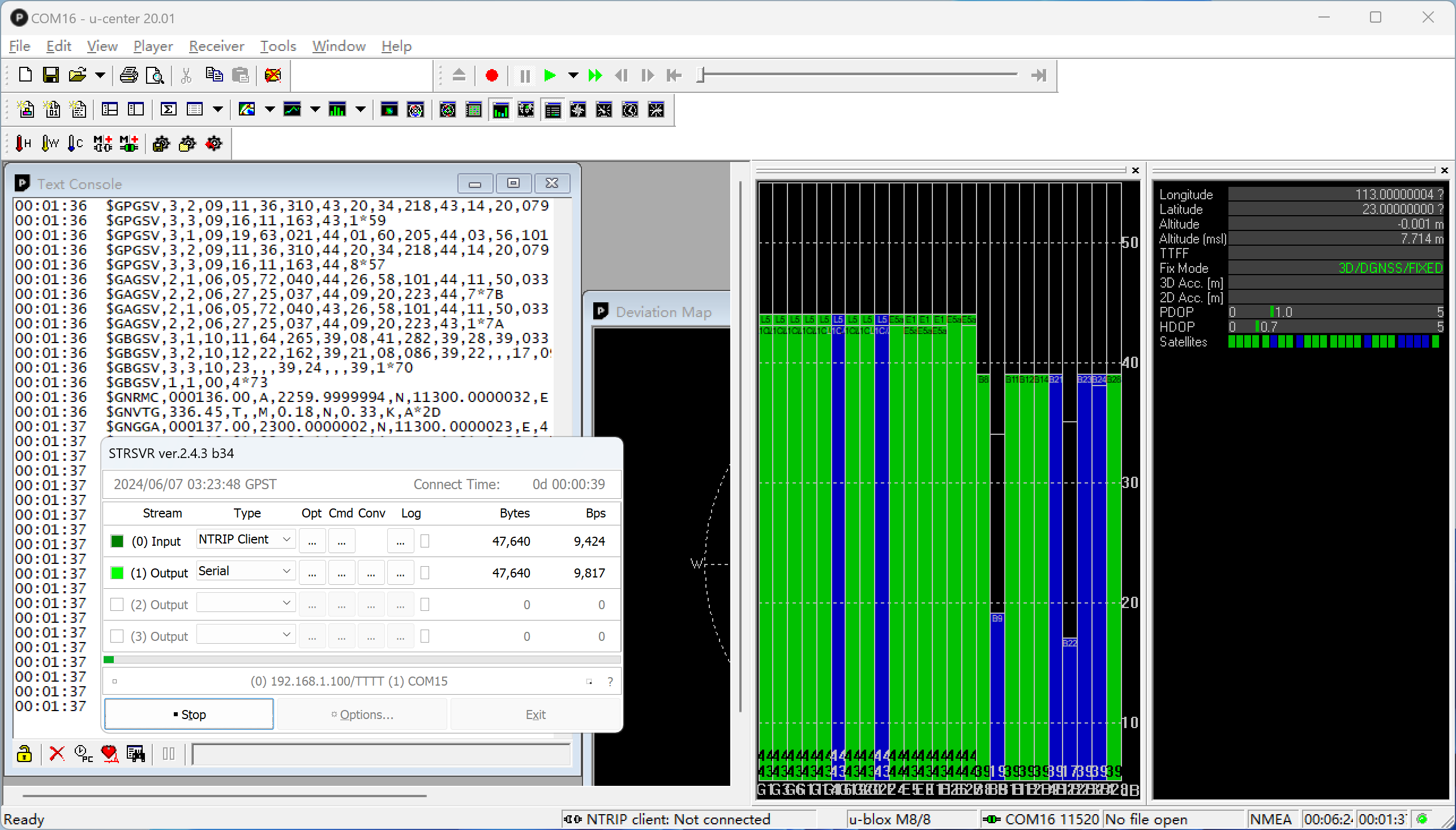
本文聚焦,使用GSS7000仿真GNSS NTRIP,利用开源工具RTKLIB 作为NTRIP Client 接受GSS7000仿真的RTCM数据, 并通过STRSVR将收到的RTCM数据通过USB-RS232数据线吐出,并转给DUT,让其获得RTK -FIXED 固定解。 废话不多说,我们直接开始。 设置GSS7000卫星导航模拟器仿真NTRIP server 并通过SNIP软件作为NTRIP

RTKLIB之RTKPLOT画图工具
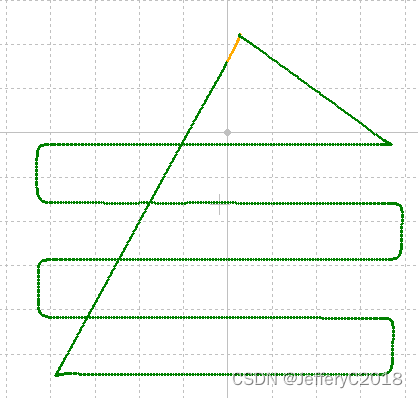
开源工具RTKLIB在业内如雷贯耳,其中的RTKPLOT最近正在学习,发现其功能之强大,前所未见,打开了新的思路。 使用思博伦GSS7000卫星导航模拟器,PosApp软件仿真一个载具位置 1,RTKPLOT支持DUT 串口直接输出的NMEA数据并画图 File-Connection settings-串口-端口波特率- 数据格式。 点击connect连接 还可以同时将两个DUT的NM

RTKLIB 中的 rtknavi 中的选项的传递过程
RTKLIB 中的 rtknavi 中的选项的传递过程 最近看了一下RTKLIB的源码,追了一下其中的 rtknavi 中的选项是如何传递进去生效的。过程如下,以处理过程选项(PrcOpt:Process Options)为例。 点击打开Options窗口时调用 TMainForm::BtnOptClick,从 TMainForm 的成员 PrcOpt 和 SolOpt 中 读取选项值到 TO
RTKLIB源码阅读(五)后处理函数调用流程、postpos、execses_b、execses_r、execses、procpos、rtkpos
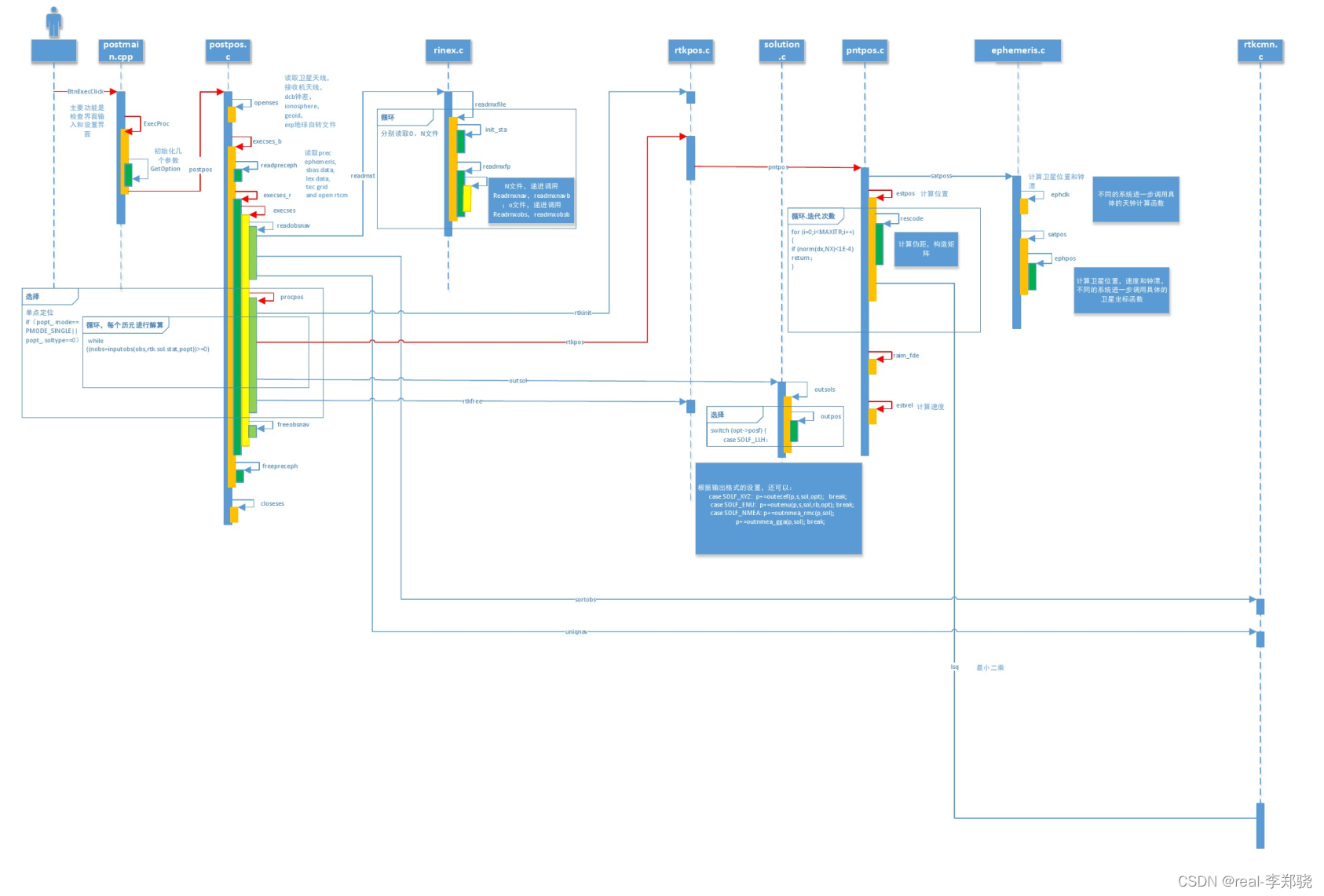
原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning 文章目录 一、后处理整体流程二、postpos()1、功能:2、输入参数:3、返回值4、执行流程5、调用的函数 三、execses_b()、execses_r()1、功能2、输入参数3、execses_b()执行
详解rtklib中main函数如何配置文件
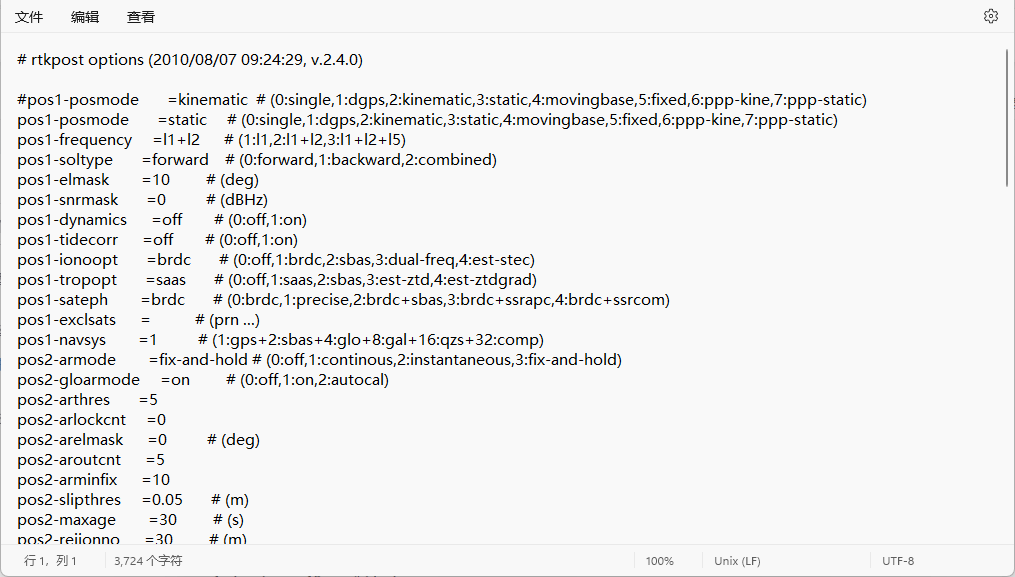
目录 Step1:如何给rtklib中的主函数 rnx2rtkp 传参 Step2:给配置选项结构体赋默认值 Step3:继续配置 Step4:寻找 main 函数参数中的 -k Step5:依次遍历参数 Step1:如何给rtklib中的主函数 rnx2rtkp 传参 关于C语言中 main 函数如何传参在这篇文章里有详细讲解,如果不懂请先进行学习。 详解main函数
rtklib进行PPK解算
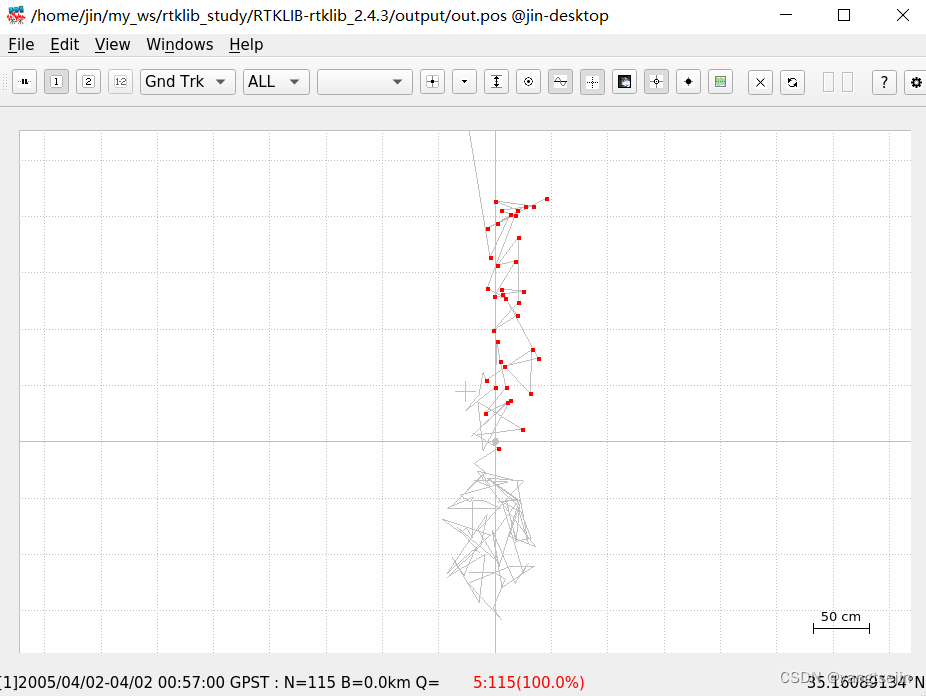
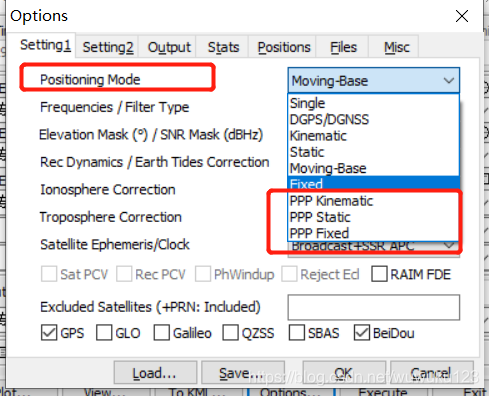
使用RTKLIB_bin-rtklib_2.4.3, 打开RTKPOST。 配置相关文件的路径,如果没有广播星历,则到武汉大学IGS数据中心 下载。 打开Options,进行配置。 点击执行 解算中 查看成果
rtklib读取原始数据是一次读取了一个文件的全部数据
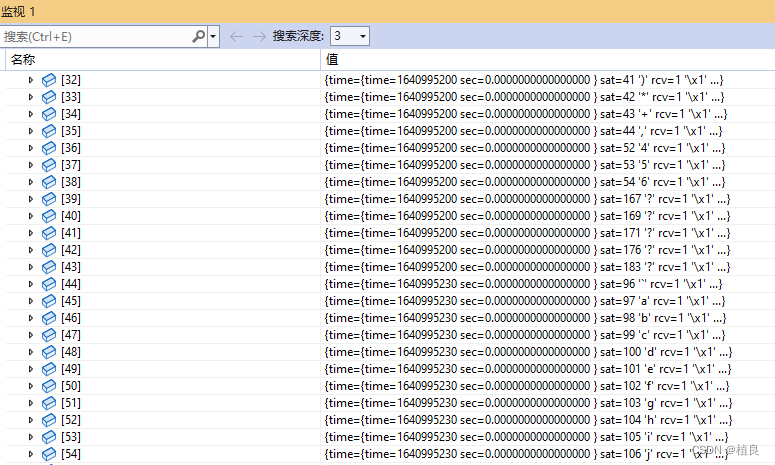
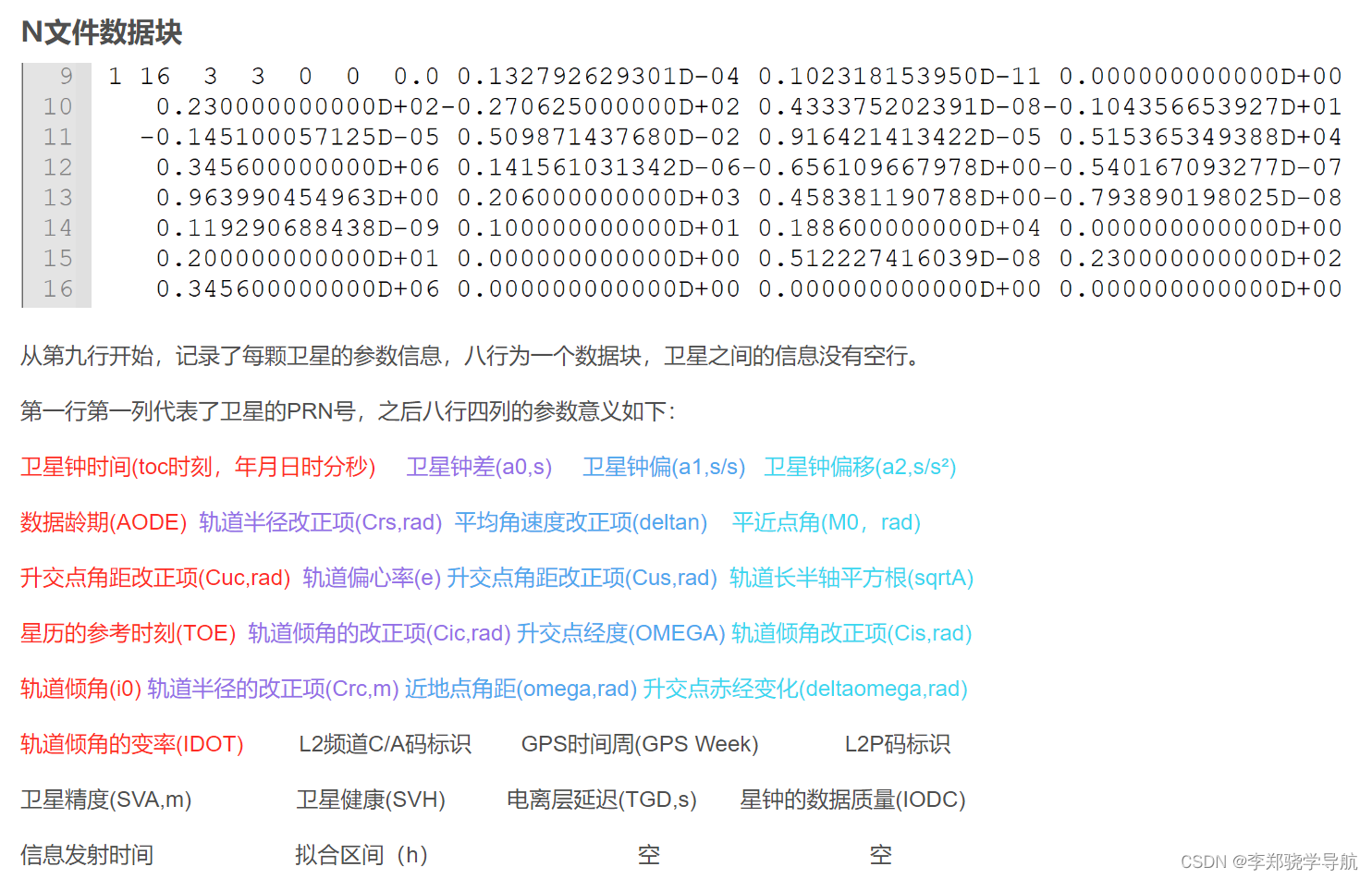
一般来说,rtklib读取观测值文件(o文件)和导航文件(n文件)进行解算。 读取文件的时候,并非一次读取一个历元,而是将一个文件所有历元的数据都读取完毕以后,再进行解算。 这看起来是一个简单的问题,但是当时纠结了一下。 以CUT2.22o数据为例: 在VS监视部分输入: obs->data,200 这里的200表示可以看到前200个(0~199); 可以看到 很明显,time是

SLAM算法与工程实践——RTKLIB编译
SLAM算法与工程实践系列文章 下面是SLAM算法与工程实践系列文章的总链接,本人发表这个系列的文章链接均收录于此 SLAM算法与工程实践系列文章链接 下面是专栏地址: SLAM算法与工程实践系列专栏 文章目录 SLAM算法与工程实践系列文章SLAM算法与工程实践系列文章链接SLAM算法与工程实践系列专栏 前言SLAM算法与工程实践——RTKLIB编译Ubuntu下rtkl
RTKLIB学习(一)--spp代码分析
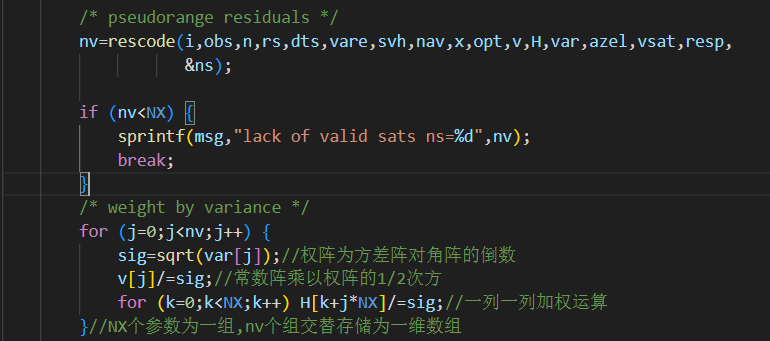
总纲: 我计划对RTKLIB学习 的目标是掌握PPP流程与逻辑,但先掌握比较简单的spp定位对PPP的学习还是有一些帮助的,尤其先在spp熟悉一些共有的数据结构和rtcmn.c中大量重合的函数后,对PPP学习应该不会太难。 本文内容先列出spp实现定位主要功能函数pntpos.c,在对其实现流程做大概阐述(并附上其他免费优秀博主的spp文章),重要的一环是对sp

RTKLIB学习笔记——rtkcmn.c(矩阵及向量运算一)
矩阵运算 创建n*m矩阵 extern double *mat(int n, int m) 1、n<=0 or m>=0 return NULL 2、内存分配错误 !(p=(double *)malloc(sizeof(double)*n*m)) fatalerr("matrix memory allocation error: n=%d,m=%d\n",n,m); 创建 n

本科生学习GNSS算法 中级教程(二)- rtklib多系统多频单点定位算法 - tgd修正以及代码实现
如何修正码偏差 上一节介绍了码偏差产生的原理,以及我们为何要修正它。 给了一篇参考论文,论文中有一节专门介绍如何对多系统多频点的码片差进行修正。下面给出论文中的截图: 从上图中的公式我们可以知道,gps的P1和P2的修正量都是Tgd乘以一个系数。而GLO和GAL系统和GPS类似一样的修正逻辑。 BDS系统由于是以B3作为卫星钟差的参考基准,所以其修正公式如下: 代码实现 r

RTKLIB中PPP调试过程及相关问题(二)
2.2 遇到的问题及解决方案 (1)精密星历读取错误 在使用bin程序进行PPP定位时显示无法读入精密星历,对照源码发现在读头文件时读取卫星个数时出现问题,源程序是默认从第四位开始读取两位,但是对于多系统卫星总数可能超过100。 此时需要在readpreceph->readsp3->readsp3h中进行相应修改: (2)北斗TGD参数与频点选择 在RINEX导航电文中,北斗系统
RTKLIB Manual之AppendixE Models and Algorithms解读
缩略语: 光速/m/s; L频段伪距/m; L频段载波相位/cycle L频段载波相位/m; 导航信号发送至接收机时间/秒——即:接收机收到信号的时间 卫星发送导航信号时间/s; 卫星和接收机天线之间的几何距离/m; 卫星和接收机天线之间的伪距率/m/s; 在时间t时,ECEF下卫星位置/m; 在时间t时,ECEF下卫星速度/m/s; 在时间t时,ECEF下接收机天线位置/m; 在时间t时,EC
RTKLIB源码阅读(七)GNSS观测量、Rinex文件读取
文章目录 一、GNSS观测量及其误差1、时间、伪距2、载波相位测量值、多普勒频移、积分多普勒 二、Rinex文件概述三、存信息的类型1、开头的#define2、卫星和卫星系统的表示3、观测值类型表示4、存Rinex文件信息的类型: 四、rinex.c开头的辅助函数1.setstr():去除结尾空格2.adjweek():调整时间差到半周内3.adjday():调整时间差到半天内4.times

RTKLIB源码阅读(二)时间系统、坐标系统
原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning 一、时间系统 double str2num(const char *s, int i, int n);int str2time(const char *s, int i, int n, gtime_t

源码学习--rtklib ppp程序天线相位中心(pco,pcv)校正流程
本博文, 梳理了rtklib使用rinex天线相位中心校正文件(.atx),校正卫星与接收机端的pco和pcv的流程 如下程序调用堆栈所示,rtklib中天线相位中心的校正可以分为三步: 1、读数据: postpos线程中,openses函数调用两次readpcv 卫星端pcv、pco存入全局变量pcvs 接收机端pcv,pco存入全局变量pcvr 2、数据转存: postpos线

使用编译版rtklib过程中如何进行main的调试(spp ppp)
使用编译版rtklib过程中如何进行main的调试(spp ppp) 在编译版rtklib的调试过程中,需要在main函数中定义一些参数。 在进行spp(伪距单点定位)的时候,我们通常这样设定相关参数。 // An highlighted blockprcopt_t popt = prcopt_default;solopt_t sopt = solopt_default;filopt_t fo