本文主要是介绍本科生学习GNSS算法 中级教程(二)- rtklib多系统多频单点定位算法 - tgd修正以及代码实现,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
如何修正码偏差
上一节介绍了码偏差产生的原理,以及我们为何要修正它。
给了一篇参考论文,论文中有一节专门介绍如何对多系统多频点的码片差进行修正。下面给出论文中的截图:
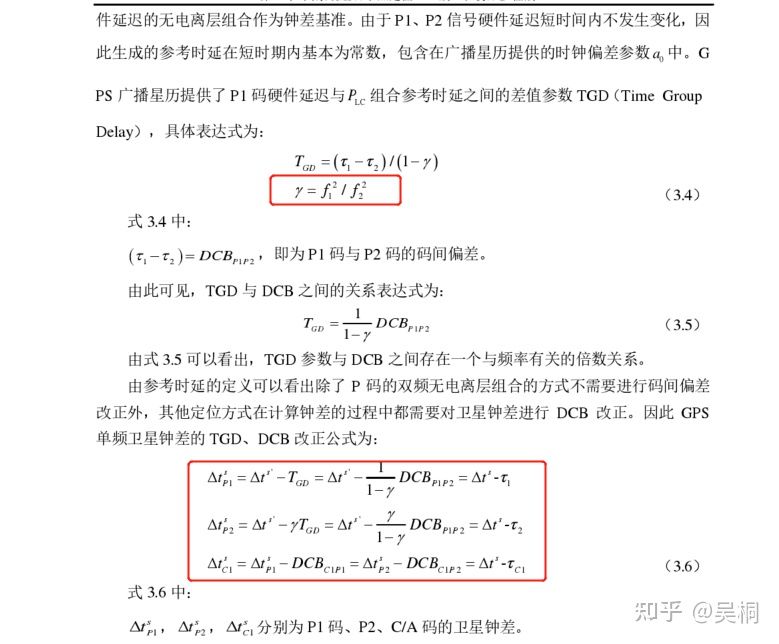
从上图中的公式我们可以知道,gps的P1和P2的修正量都是Tgd乘以一个系数。而GLO和GAL系统和GPS类似一样的修正逻辑。
BDS系统由于是以B3作为卫星钟差的参考基准,所以其修正公式如下:

代码实现
rtklib中单点定位程序调用修正码偏差的函数为pntpos.c->prange(),为和原始区分,我们支持多频修正的函数取名为prange_mulfreq(),并多传入一个频率的index,用来指示计算哪个频率的修正后的伪距。
GPS系统的修正逻辑如下,注意查看我增加的注释:
if (sys == SYS_GPS || sys == SYS_QZS){gamma = SQR(FREQ1 / FREQ2);b1 = gettgd(sat, nav, 0); /* TGD (m) */switch (obs->code[k]){/*for L1C, we need to calibrate the DCB between P1 and C1. but here we ignore it*/case CODE_L1C:case CODE_L1P:tgd = b1;break;/*for L2P, calibrate tgd according the paper*/case CODE_L2P:case CODE_L2W:tgd = b1 * gamma;break;/*no L5 tgd info in broadcast nav, give the default value 0*/case CODE_L5Q:tgd = 0.0;break;}}BDS系统修正方法与其他有区别,将BDS系统的修正逻辑粘贴如下:
else if (sys == SYS_CMP){ switch (obs->code[k]){case CODE_L2I:tgd = gettgd(sat, nav, 0);break;case CODE_L7I:tgd = gettgd(sat, nav, 1);break;/*for BDS sys, the reference frequency is 6I. that's why the correction in 6I is zeror*/case CODE_L6I:tgd = 0.0;break;case CODE_L1P:tgd = gettgd(sat, nav, 2);break;case CODE_L5P:tgd = gettgd(sat, nav, 3);break;}}BDS2支持的信号为2I/7I/6I,一共三频,一般认为按顺序叫作北斗的第一、二、三频点。而BDS3则支持更多的频点,其播发了2I/6I,并且为了与GPS/GAL兼容互操作,播发了新的1C以及5P。所有的诸如2I/1P/5P的频点叫法,都来自于rinex的中的频率定义,详情请参考该文档。
最后贴上整个prange_mulfreq()函数。GLO修正逻辑部分未做完全考虑,可能存在错误。个人不太喜欢也不太建议使用GLO系统,现有的GPS+BDS+GAL卫星数已完全足够使用。
函数的前半部分其实保留了原函数的功能,即对无电离层组合观测值的修正。
整个函数
/* psendorange with code bias correction -------------------------------------*/
static double prange_mulfreq(const obsd_t *obs, const nav_t *nav, const prcopt_t *opt, const int k,double *var)
{double P1, P2, gamma, b1, b2, P, tgd;int sat, sys;sat = obs->sat;sys = satsys(sat, NULL);P1 = obs->P[0];P2 = obs->P[1];*var = 0.0;if (P1 == 0.0 || (opt->ionoopt == IONOOPT_IFLC && P2 == 0.0))return 0.0;/* P1-C1,P2-C2 DCB correction */if (sys == SYS_GPS || sys == SYS_GLO){if (obs->code[0] == CODE_L1C)P1 += nav->cbias[sat - 1][1]; /* C1->P1 */if (obs->code[1] == CODE_L2C)P2 += nav->cbias[sat - 1][2]; /* C2->P2 */}if (opt->ionoopt == IONOOPT_IFLC){ /* dual-frequency */if (sys == SYS_GPS || sys == SYS_QZS){ /* L1-L2,G1-G2 */gamma = SQR(FREQ1 / FREQ2);return (P2 - gamma * P1) / (1.0 - gamma);}else if (sys == SYS_GLO){ /* G1-G2 */gamma = SQR(FREQ1_GLO / FREQ2_GLO);return (P2 - gamma * P1) / (1.0 - gamma);}else if (sys == SYS_GAL){ /* E1-E5b */gamma = SQR(FREQ1 / FREQ7);if (getseleph(SYS_GAL)){ /* F/NAV */P2 -= gettgd(sat, nav, 0) - gettgd(sat, nav, 1); /* BGD_E5aE5b */}return (P2 - gamma * P1) / (1.0 - gamma);}else if (sys == SYS_CMP){ /* B1-B2 */gamma = SQR(((obs->code[0] == CODE_L2I) ? FREQ1_CMP : FREQ1) / FREQ2_CMP);if (obs->code[0] == CODE_L2I)b1 = gettgd(sat, nav, 0); /* TGD_B1I */else if (obs->code[0] == CODE_L1P)b1 = gettgd(sat, nav, 2); /* TGD_B1Cp */elseb1 = gettgd(sat, nav, 2) + gettgd(sat, nav, 4); /* TGD_B1Cp+ISC_B1Cd */b2 = gettgd(sat, nav, 1); /* TGD_B2I/B2bI (m) */return ((P2 - gamma * P1) - (b2 - gamma * b1)) / (1.0 - gamma);}else if (sys == SYS_IRN){ /* L5-S */gamma = SQR(FREQ5 / FREQ9);return (P2 - gamma * P1) / (1.0 - gamma);}}else{ /* single-freq */if (k < 0 || k >= (NFREQ + NEXOBS)){return 0.0;}P = obs->P[k];*var = SQR(ERR_CBIAS);tgd = 0.0;if (sys == SYS_GPS || sys == SYS_QZS){gamma = SQR(FREQ1 / FREQ2);b1 = gettgd(sat, nav, 0); /* TGD (m) */switch (obs->code[k]){/*for L1C, we need to calibrate the DCB between P1 and C1. but here we ignore it*/case CODE_L1C:case CODE_L1P:tgd = b1;break;/*for L2P, calibrate tgd according the paper*/case CODE_L2P:case CODE_L2W:tgd = b1 * gamma;break;/*no L5 tgd info in broadcast nav, give the default value 0*/case CODE_L5Q:tgd = 0.0;break;}}else if (sys == SYS_GLO){ /*for GLO, the logic may has error*/gamma = SQR(FREQ1_GLO / FREQ2_GLO);b1 = gettgd(sat, nav, 0); /* -dtaun (m) */b1 = b1 / (gamma - 1.0);switch (obs->code[k]){case CODE_L1C:case CODE_L1P:tgd = b1;break;case CODE_L2C:case CODE_L2P:tgd = b1 * gamma;break;}}else if (sys == SYS_GAL){ /*for GAL sys, there is two ephemerises*/if (getseleph(SYS_GAL))b1 = gettgd(sat, nav, 0); /* BGD_E1E5a */elseb1 = gettgd(sat, nav, 1); /* BGD_E1E5b */switch (obs->code[k]){case CODE_L1C:tgd = b1;break;case CODE_L5Q:gamma = SQR(FREQ1 / FREQ5);tgd = b1 * gamma;break;case CODE_L7Q:gamma = SQR(FREQ1 / FREQ7);tgd = b1 * gamma;break;}}else if (sys == SYS_CMP){ switch (obs->code[k]){case CODE_L2I:tgd = gettgd(sat, nav, 0);break;case CODE_L7I:tgd = gettgd(sat, nav, 1);break;/*for BDS sys, the reference frequency is 6I. that's why the correction in 6I is zeror*/case CODE_L6I:tgd = 0.0;break;case CODE_L1P:tgd = gettgd(sat, nav, 2);break;case CODE_L5P:tgd = gettgd(sat, nav, 3);break;}}return P - tgd;}return P1;
}代码已上传到国内版git上(gitee,主要是网速快)。代码链接 请在个人公众号回复 git 获取。在此也建议大家使用git工具clone代码,这样可以便于查看代码的更新历史,以及方便拉取最新的代码。
另外本节的代码在mulfreq-spp分支,注意分支切换。master分支是原始的rtklib代码。另外虽然mulfreq-spp分支有一些其他的改动,但暂时结果的正确性无法保证,我还在开发中。
另外一个,建议大家使用vscode来查看代码。git和vscode的使用请自行搜索博客或者bilibili。
下一节我会讲一下如何使用git查看代码的历史以及使用vscode查看每次提交的改动,这样方便大家理解代码的修改思路。
欢迎关注个人公众号
个人公众号 GNSS和自动驾驶,会持续更新GNSS的基础教程/进阶教程/GNSS在自动驾驶中的应用/自动驾驶技术进展等。
这篇关于本科生学习GNSS算法 中级教程(二)- rtklib多系统多频单点定位算法 - tgd修正以及代码实现的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





