多频专题

常用于单北斗多频定位导航模块资料:ATGM332D-F8N
单北斗多频定位导航模块的高精度定位优点描述: 1、多频信号融合:单北斗多频定位导航模块能够接收和处理来自北斗卫星系统的多个频段信号。通过多频信号的融合处理,可以显著提高定位的精度。因为不同频段的信号在传播过程中受到的影响不同,通过多频观测可以消除或减弱这些影响,从而提高定位的准确性。 2、精密算法支持:现代定位导航模块通常配备有精密的算法,能够充分利用多频信号的信息,进行高精度的位置解

武汉凯迪正大—三倍频发生器电源发生装置 倍频试验装置 多频装置
产品概述 武汉凯迪正大KDSF 感应耐压试验装置是根据国家标准《GB311-64》和原水电部发布的《电气设备预防性试验规程》,为满足电力系统对高压电压互感器、倍频感应耐压试验设备的要求而设计的,用于电力系统35-220KV等级电压互感器的交流耐压试验,以考核互感器的主纵绝缘强度,同时也可对电机及变压器的绕组进行感应耐压试验,也可作短时运行的150HZ电源用。 武汉凯迪正大KDSF 感应耐压试验

ATGM332D-F8S:高集成度单北斗多频车载航位推算模块规格书
车载航位 推算 模块 描述 : 是一种在车载导航系统中广泛应用的自主导航算法模块,主要用于弥补GPS或GNSS(全球导航卫星系统)在信号遮蔽环境下的定位不足。 车载航位推算模块通过收集来自车辆上各种传感器(如陀螺仪传感器、加速度计、速度脉冲传感器等)的信息,计算车辆的即时航向和行驶距离,从而推算出车辆当前的位置。这是一个信息累加的过程,依赖于车辆的初始位置和姿态信息。 ATGM332

毕设题目:Matlab DTMF双音多频
1 案例背景 双音多频信号能够提供更高的拨号速率,在数字通信及其它方面有着广泛的应用。文章运用MATLAB软件实现了DTMF信号的产生、接收和检测,使用MATLAB中GUI用户界面管理功能实现双音多频拨号系统的仿真,为教学建立了平台。 2 现成案例(代码+参考文献) 1. 【数字信号】基于matlab GUI DTMF双音多频电话拨号仿真【含Matlab源码 805期】 2. 【数字信号】基于

相移+格雷码,多频外差,代码(matlab c++) 基于c++版本相位编码与解码 单目结构光三维扫描
相移+格雷码,多频外差,代码(matlab c++) 单目结构光三维扫描 双目结构光三维扫描 相机标定,投影仪标定,系统标定 基本matlab版本相位编码与解码 基于c++版本相位编码与解码 YID:51500688513701884
单目结构光三维重建 多频外差单目重建
单目结构光三维重建 基于结构光的重建包括了双目三维重建和单目三维重建,双目的重建方法主要采用双目立体视觉算法来匹配两幅图片的相位信息,可以参考我的多频外差双目重建,这里不做介绍了。主要还是介绍下我做的单目三维重建,当然结构光采用的方法还是基于多频外差的方法。传统的单目算法是将投影仪设备当做一个反向相机来处理的,其实质还是双目的立体匹配方法。这种方法缺点是投影仪的畸变大精度不高,而且标定过程也比较
单目结构光三维重建 多频外差单目重建
单目结构光三维重建 基于结构光的重建包括了双目三维重建和单目三维重建,双目的重建方法主要采用双目立体视觉算法来匹配两幅图片的相位信息,可以参考我的多频外差双目重建,这里不做介绍了。主要还是介绍下我做的单目三维重建,当然结构光采用的方法还是基于多频外差的方法。传统的单目算法是将投影仪设备当做一个反向相机来处理的,其实质还是双目的立体匹配方法。这种方法缺点是投影仪的畸变大精度不高,而且标定过程也比较

本科生学习GNSS算法 中级教程(二)- rtklib多系统多频单点定位算法 - tgd修正以及代码实现
如何修正码偏差 上一节介绍了码偏差产生的原理,以及我们为何要修正它。 给了一篇参考论文,论文中有一节专门介绍如何对多系统多频点的码片差进行修正。下面给出论文中的截图: 从上图中的公式我们可以知道,gps的P1和P2的修正量都是Tgd乘以一个系数。而GLO和GAL系统和GPS类似一样的修正逻辑。 BDS系统由于是以B3作为卫星钟差的参考基准,所以其修正公式如下: 代码实现 r

单目结构光三维重建 多频外差单目重建
基于结构光的重建包括了双目三维重建和单目三维重建,双目的重建方法主要采用双目立体视觉算法来匹配 两幅图片的相位信息,可以参考我的多频外差双目重建,这里不做介绍了。主要还是介绍下我做的单目三维重建, 当然结构光采用的方法还是基于多频外差的方法。传统的单目算法是将投影仪设备当做一个反向相机来处理的,其 实质还是双目的

立体视觉_基于多频外差的三频正弦波理想状态下的解相位
立体视觉_基于多频外差的三频正弦波理想状态下的解相位 2017.7.18 1.背景 在双目视觉中,如何协调两个摄像头并获取深度信息是一项关键技术。其中精度较高的办法之一是使用基于多频外差原理的相位相关技术。初到公司实习,接到的第一个任务就是学习多频外差的解相位相关技术。从无到有的三天学习,从理论知识到用具体数据模拟,在python下进行可视化实现,作以博文以记之。 2.过程

多频外差法之三频四相的理论与实现(matlab)
在提取相位时,如果图像内的周期数仅为一个,则相对相位就是绝对相位,则求得的相位主值就是它的相位值。 实际中,我们投射的光栅并不是一个周期,那么在整个测量的空间中就会求得多个相同的相位主值,这时就需要对包裹的相位值进行展开。 相位包裹又是什么意思呢? 相位包裹的主要原因是相移法解相时使用了反正切函数,用atan2函数,得到四个象限的反正切,所以计算的相位都是在(-pi,pi]之间,也就是被包裹
结构光相移法-多频外差原理+实践(上篇)
01 相移法原理 02 双频外差原理 03 多频率外差原理 04 代码实践 01 相移法原理 结构光法原理其实是跟双目视觉一样的,都是要确定对应“匹配点”,利用“视差”三角关系计算距离,所不同的是: 双目视觉通过“被动”匹配唯一特征点 相移法作为结构光法中的一种,通过主动投影多副相移图案来标记唯一位置。 说明:虽然大多数结构光系统是单目的,但我们可以将其“双目”的,因为投影仪可以看做是
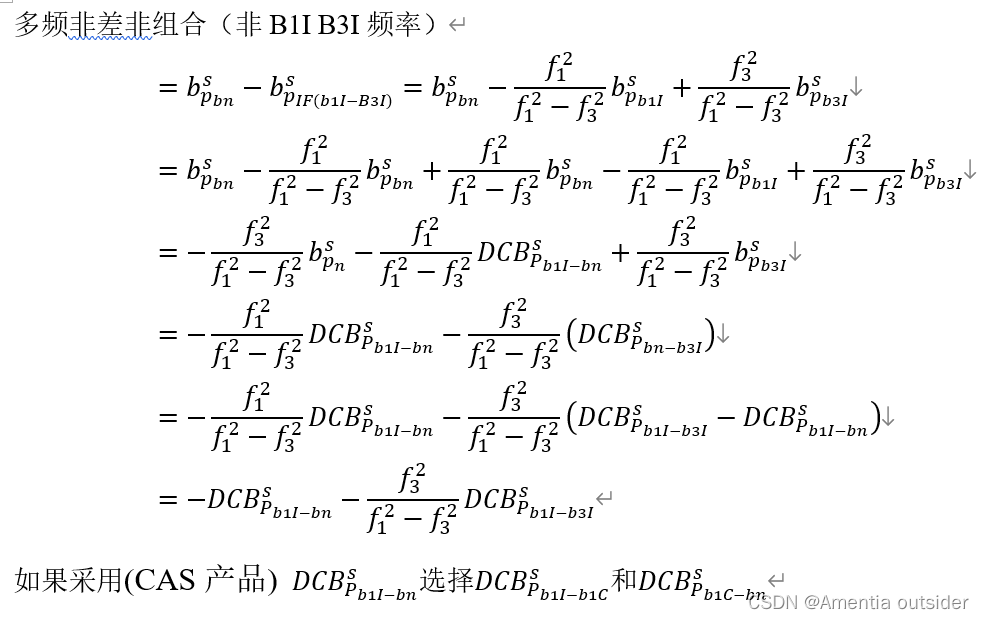
北斗多频多系统卫星端硬件延迟改正(DCB OSB)
卫星端硬件延迟改正通常有两种做法:1、DCB文件改正 2、OSB文件改正(推荐) 下面推导北斗系统DCB改正公式(采用 CAS GFZ产品) 发布的精密星历和精密钟差产品BDS2和BDS3均采用B1I、B3I无电离层组合模型进行参数估计。 在传统的无电离层组合观测数据处理中,该项误差包含在钟差参数中,不需要单独考虑该误差。但是如果用户端不采用同样的无电离层组合,则必须对每个频率上的观测值