本文主要是介绍单目结构光三维重建 多频外差单目重建,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
单目结构光三维重建
基于结构光的重建包括了双目三维重建和单目三维重建,双目的重建方法主要采用双目立体视觉算法来匹配两幅图片的相位信息,可以参考我的多频外差双目重建,这里不做介绍了。主要还是介绍下我做的单目三维重建,当然结构光采用的方法还是基于多频外差的方法。传统的单目算法是将投影仪设备当做一个反向相机来处理的,其实质还是双目的立体匹配方法。这种方法缺点是投影仪的畸变大精度不高,而且标定过程也比较麻烦,还要从投影仪里面投射一幅标定还真实的标定放在一起,对于有点强迫症的我还是不想做这种。如是查了下原来还有更方便的方法,那就是直接标定相位和三维坐标的关系,如图-1。这种方法简直不要太方便了,而且表面上流程跟双目差不多,对于我一直做双目的人就想偷下懒。
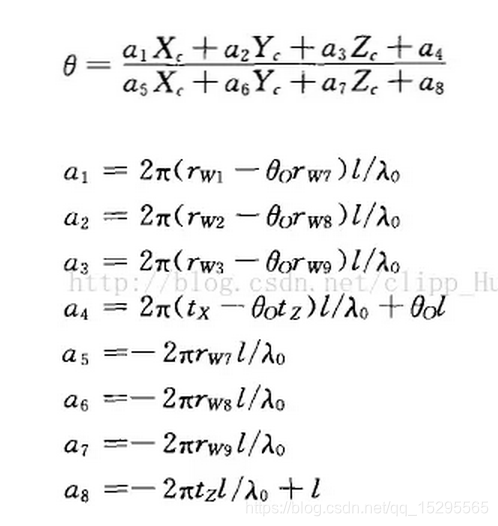
图-1相位与三维关系
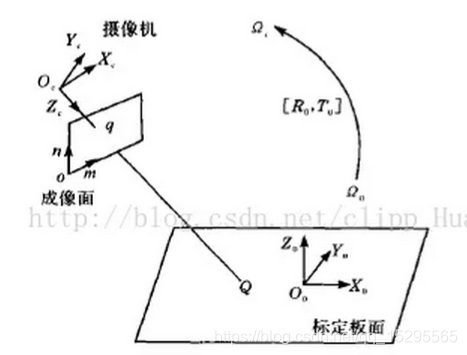
图-2 相机坐标系
具体的流程是:
1:相机内参的标定,还是使用基于opencv的平板标定法,标定好内参和畸变系数就可以了;
2:相位的标定,就是将标定板在视场中摆放几个不同的位置(>5吧)
3:将所有的三维点和相机值代入上式,求取参数即可。
4:有了相机内参和标定相位与三维关系参数,就可以根据成像模型就行三维重建了。
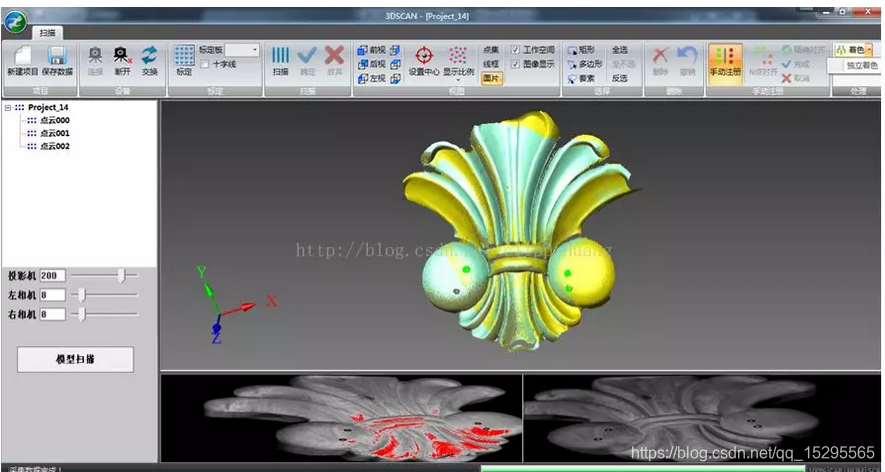
实验过程:采集了两个物体,右边是标准求做精度测试的
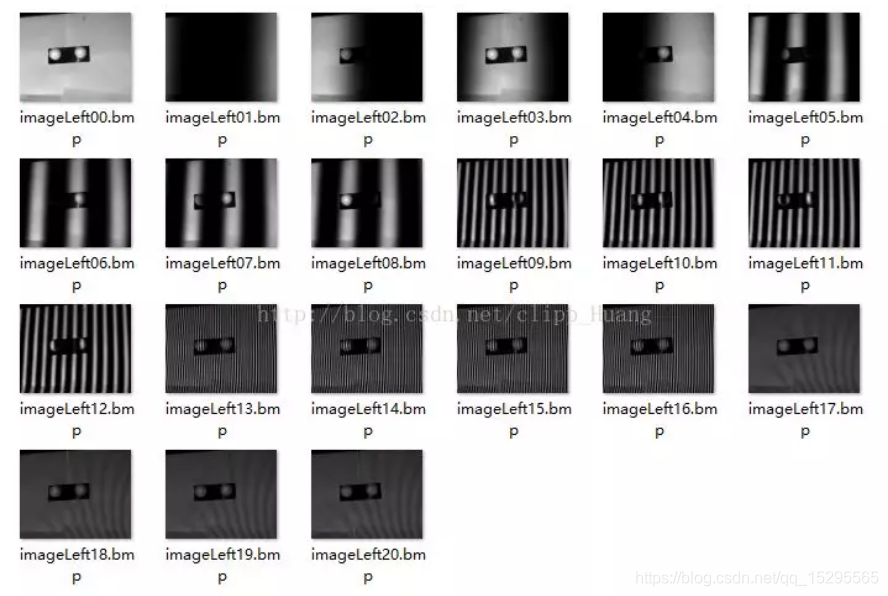
从实验的效果来看,基本上算是完成了,用标准球测试的结果是40cm左右的测量距离,130W相机,精度在0.05mm。
---------------------------------------------------------------------------------
多频外差单目重建
结构光三维重建主要的原理就是从投影仪中投射一定频率的结构光,这种光跟以前采用的格雷码方式不同,它具有一定的正玄性。而多频外差的方式说的就是采用几种不同频率的正玄光,为什么采用多频外差的方式,从我多年的实践经验来看,多频外差法具有很好的抗干扰、对物体重建出来的细节保留的比较好、精度更高一些。下面我先梳理一下算法细节。
相移:
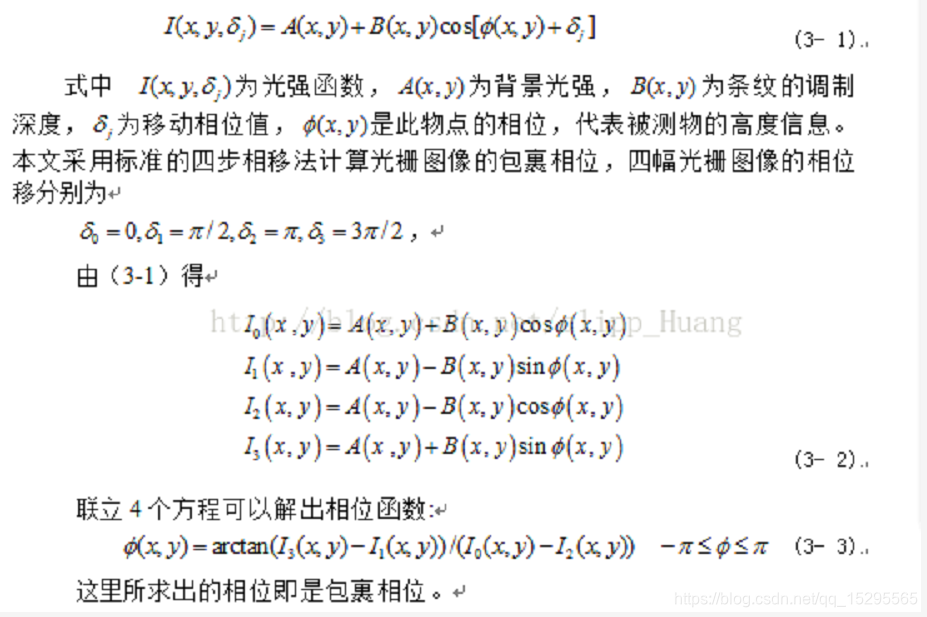
在进行展开相位前,必须先获得每点的包裹相位,其中最成熟最可靠的算法是相移法,该方法已经实现了商品化。相移法[的最大优点还在于求解物体初相位时是点对点的运算,即在原理上某一点的相位值不受相邻点光强值的影响,从而避免了物面反射率不均匀引起的误差。其基本思想是:将一个光强分布呈正弦变化的光栅作为面结构光投影到被测工件表面,所探测的正弦光栅受被测物体表面高度调制产生的光强函数可以用下式表示: (公式不好编辑,只好截图了)
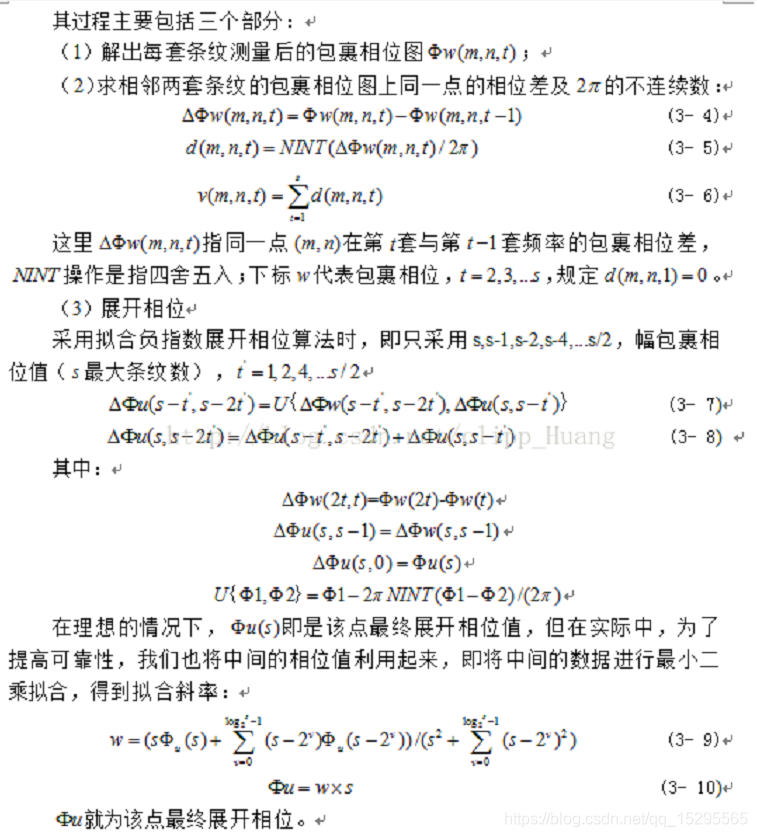
多频外差算法步骤:
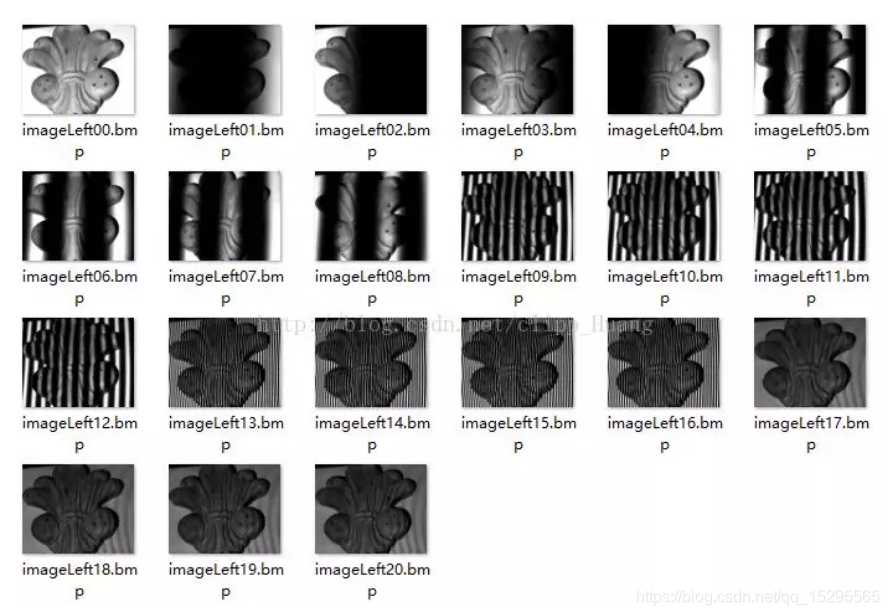
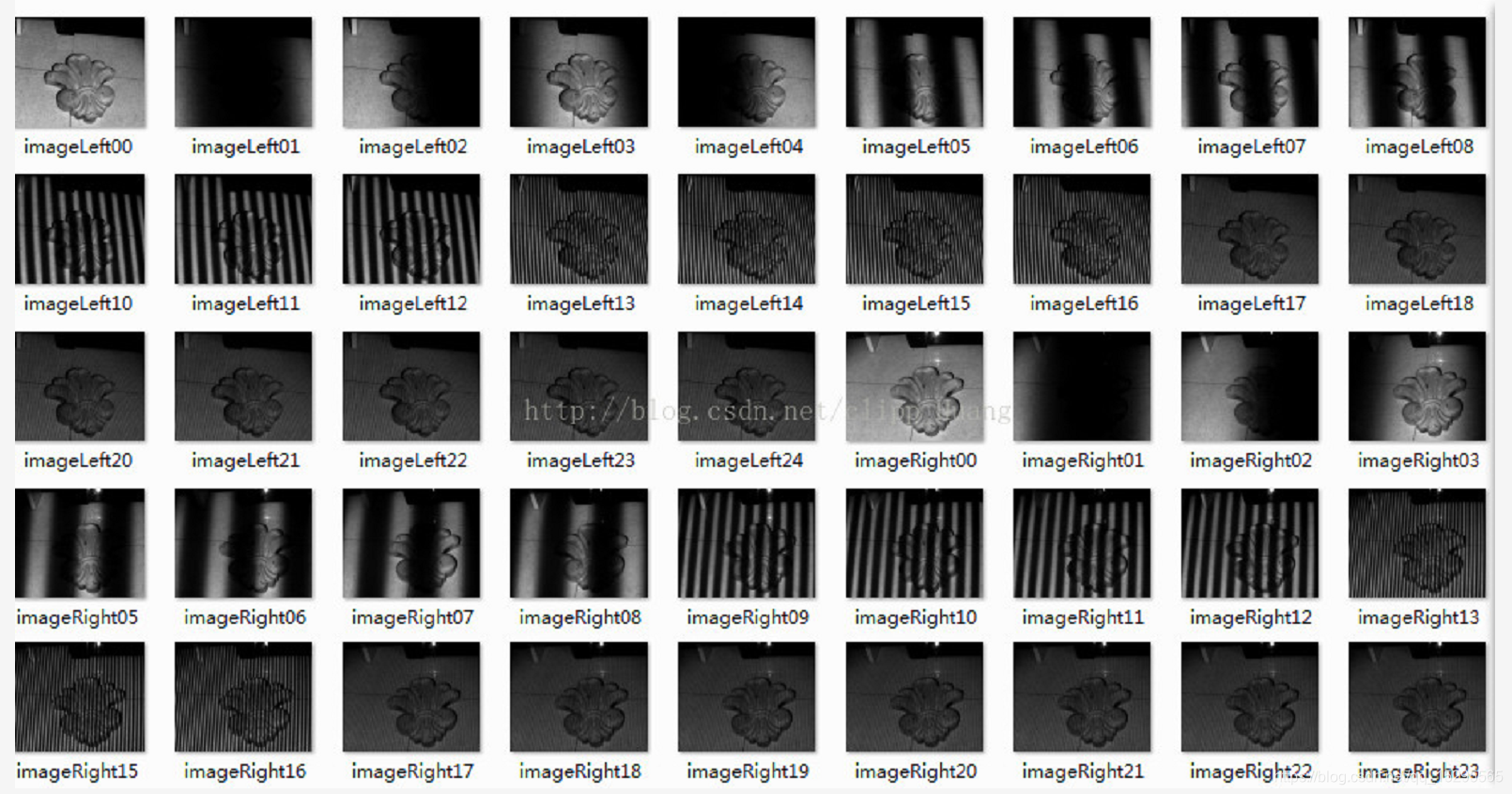
我使用的是5个频率的解码:code 如下
oid MultiPhaseDec::decMultiPhase5(Mat *imgShift,Mat &imgAbsPhase)
{//获取wrap相位F32 *dPtr = (F32*)imgAbsPhase.data;Mat imgPhase[5] ;for(int k=0;k<5;k++)imgPhase[k] = Mat::zeros(m_nHeight,m_nWidth,CV_32FC1);for(int n = 0;n<4;n++){F32 *pha= (F32*)imgPhase[n].data;for(int k=0;k < m_nWidth*m_nHeight;k++){pha[k] = (float)sqrt(atan2((double)(I1[k]-I3[k]),(double)(I0[k]-I2[k]))) ;}}Mat imgAbsPhase1= Mat::zeros(m_nHeight,m_nWidth,CV_32FC1);Mat imgAbsPhase2= Mat::zeros(m_nHeight,m_nWidth,CV_32FC1);Mat imgAbsPhase3= Mat::zeros(m_nHeight,m_nWidth,CV_32FC1);phaseUnWrap(imgPhase[0],imgPhase[1],imgAbsPhase1,m_dFreq[0],m_dFreq[1]);phaseUnWrap(imgAbsPhase1,imgPhase[2],imgAbsPhase2,m_dFreq[1],m_dFreq[2]);phaseUnWrap(imgAbsPhase2,imgPhase[3],imgAbsPhase3,m_dFreq[2],m_dFreq[3]);phaseUnWrap(imgAbsPhase3,imgPhase[4],imgAbsPhase,m_dFreq[3],m_dFreq[4]);//ImgShowPhase(imgPhase[0],"0");// ImgShowPhase(imgPhase[1],"1"); //ImgShowPhase(imgPhase[2],"2");//ImgShowPhase(imgPhase[3],"3");// ImgShowPhase(imgPhase[4],"4");
// cvWaitKey(1000000);
// // ImgShowAbsPhase(imgPhase[0],PI2,"abs0");
// ImgShowAbsPhase(imgAbsPhase1,3*PI2,"abs1");
// ImgShowAbsPhase(imgAbsPhase2,9*PI2,"abs2");
// ImgShowAbsPhase(imgAbsPhase3,27*PI2,"abs3");
// ImgShowAbsPhase(imgAbsPhase,81*PI2,"abs4");// cvWaitKey(1000000);}5个频率打出来的光是这个样子的
视频:https://pan.baidu.com/s/1uC-n0Wo4KNzsu-VlLbcfcg
文章来源:https://blog.csdn.net/clipp_Huang/article/details/78022030?locationNum=4&fps=1
https://blog.csdn.net/clipp_Huang/article/details/53615571
作者: clipp_Huang
这篇关于单目结构光三维重建 多频外差单目重建的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







