重建专题

Python(TensorFlow和PyTorch)两种显微镜成像重建算法模型(显微镜学)
🎯要点 🎯受激发射损耗显微镜算法模型:🖊恢复嘈杂二维和三维图像 | 🖊模型架构:恢复上下文信息和超分辨率图像 | 🖊使用嘈杂和高信噪比的图像训练模型 | 🖊准备半合成训练集 | 🖊优化沙邦尼尔损失和边缘损失 | 🖊使用峰值信噪比、归一化均方误差和多尺度结构相似性指数量化结果 | 🎯训练荧光显微镜模型和对抗网络图形转换模型 🍪语言内容分比 🍇Python图像归一化

JD 1385:重建二叉树
OJ题目:click here~~ 题目分析:给前序遍历序列和中序遍历序列,重构二叉树并输出后序遍历序列 剑指offer 面试题6 AC_CODE int pre[1008] , in[1008] ;struct Node{int x ;Node *left ;Node *right ;};bool buildsubtree(Node*& root , int* spre , in
Activity转屏重建之 Activity.onConfigurationChanged
偶尔也会遇到由于转屏引起的一些问题。 有些时候,并不希望由于转屏使得Activity取重建。 再如键盘消失后的重建。 下面以一个demo为例子,小小总结一下用法。 如果想在转屏后,屏幕上立马打印出当前处于什么横竖屏状态 1.都知道有个属性android:configChanges可以用来定义什么情况下可以使得Activity不会restart。 android:configC

Activity生命周期 与 重建
每一个Android应用程序在运行时,对于底层的Linux Kernel而言都是一个单独的进程,但是对于Android系统而言,因为局限于手机画面的大小与使用的考虑,不能把每一个运行中的应用程序窗口都显示出来。 所以通常手机系统的界面一次仅显示一个应用程序窗口,Android使用了Activity的概念来表示界面。 运行中的应用程序分为五大类,分别是: 前景模式

【conda】导出和重建 Conda 环境
目录 1. 导出 Conda 环境1.1 激活环境1.2 导出环境配置1.3 检查和编辑环境配置文件(可选)1.4 共享或重建环境 2. 常见问题及解决方案2.1 导出环境时出现 “PackagesNotFoundError”2.2 导出的 `environment.yml` 文件在其他系统上无法使用2.3 导出的环境文件过大2.4 如何处理 Conda 环境中的 pip 包2.5 在导出或
二叉树的遍历(篇5)由中序和先序序列重建二叉树
让我们考虑下面的遍历: 中序序列:DBEAFC 前序序列:ABDECF 在Preorder序列中,最左侧的元素是树的根。所以我们知道’A’是给定序列的根。通过在Inorder序列中搜索’A’,我们可以发现’A’左侧的所有元素都在左子树中,右侧的元素在右子树中。所以我们现在知道下面的结构。 A/ \/ \D B E F C 我们递归
根据前序和中序重建二叉树
输入某二叉树的前序遍历和中序遍历的结果,请重建出该二叉树。假设输入的前序遍历和中序遍历的结果中都不含重复的数字。例如输入前序遍历序列{1,2,4,7,3,5,6,8}和中序遍历序列{4,7,2,1,5,3,8,6},则重建二叉树并返回。 #include <iostream>#include <vector>#include <math.h>#include <stdlib.h>


力扣406-根据身高重建队列(java详细题解)
题目链接:406. 根据身高重建队列 - 力扣(LeetCode) 前情提要: 因为本人最近都来刷贪心类的题目所以该题就默认用贪心方法来做。 贪心方法:局部最优推出全局最优。 如果一个题你觉得可以用局部最优推出全局最优,并且没有反例来反驳的话就可以用贪心来试试。 题目思路: 如果你看过我对于力扣135-分发糖果那篇题解的话,会发现这个题好像跟那个有一点类似。 类似在哪里? 这俩道题

剑指offer2-重建二叉树
二叉树的遍历: 先序遍历:先访问根节点,再访问左子树,最后访问右子树; 中序遍历:先访问左子树,再访问根节点,最后访问右子树; 后序遍历:先访问左子数,再访问右子树,最后访问根节点; 一般给定一棵二叉树的中序遍历和先序遍历或者给定一个二叉树的中序遍历和后序遍历,这棵二叉树就可以确定下来。仅仅给定先序遍历和后序遍历是无法确定的。 题目: 给定某二叉树的先序和中序遍历结果,请确定该二叉树:

创建调度任务自动完成索引重建
--创建顺序 programms-schedule-job 其中创建3个programms分别可执行脚本,匿名pl/sql,procedure。 --创建P1,P2,P3 --创建Schedule --创建job --p1--
Java面试:重建二叉树题目
题目:输入某二叉树的前序遍历和中序遍历的结果,请重建出该二叉树。假设输入的前序遍历和中序遍历的结果中都不含重复的数字。 解答: public static void main(String[] args) {//前序遍历数int [] preNode ={1,2,4,7,3,5,6,8};//中序遍历数int [] infixNode ={4,7,2,1,5,3,8,6};TreeNo

npm install报错解决指南:清理缓存与重建依赖
问题描述 在执行npm install命令时,npm install报错,导致依赖无法正常安装。 具体步骤 清理npm缓存: 使用npm cache clean --force命令来强制清理npm缓存,以排除缓存导致的问题。 检查Node.js和npm版本: 执行node -v和npm -v命令来查看当前系统中Node.js和npm的版本号,确保版本兼容性。 删除node_modu
重建二叉树(面试算法)
题目描述: 输入某二叉树的前序遍历和中序遍历的结果,请重建出该二叉树。假设输入的前序遍历和中序遍历的结果中都不含重复的数字。例如输入前序遍历序列{1,2,4,7,3,5,6,8}和中序遍历序列{4,7,2,1,5,3,8,6},则重建二叉树并返回。 二叉树遍历方式: 前序遍历:按 根节点 ——>左子树(或左节点)——>右子树(或右节点)的顺序进行访问 中序遍历:按 左子树(或左节点)——>
代码随想录算法训练营第二十九天| 134. 加油站 135. 分发糖果 860.柠檬水找零 406.根据身高重建队列
134. 加油站 题目: 在一条环路上有 n 个加油站,其中第 i 个加油站有汽油 gas[i] 升。 你有一辆油箱容量无限的的汽车,从第 i 个加油站开往第 i+1 个加油站需要消耗汽油 cost[i] 升。你从其中的一个加油站出发,开始时油箱为空。 给定两个整数数组 gas 和 cost ,如果你可以按顺序绕环路行驶一周,则返回出发时加油站的编号,否则返回 -1 。如果存在解,则 保证
Oracle(87)如何判断是否需要重建索引?
判断是否需要重建索引是数据库维护中的一个关键步骤。为了确定是否需要重建索引,可以考虑以下几个因素: 索引碎片化程度:通过分析索引的碎片化程度来确定是否需要重建。索引的B-Tree层级(blevel):B-Tree索引的层级越高,查询性能可能越差。叶块数量(leaf_blocks):叶块数量的显著增加可能表明索引需要重建。聚簇因子(clustering_factor):聚簇因子越接近表的行数,索引
PCL 基于贪心三角化的点云网格化重建
目录 一、概述1.1 定义1.2 实现过程1.3 核心函数 二、代码示例三、结果示例 一、概述 1.1 定义 🙋 贪心三角化:是一种对原始点云进行快速三角化的算法,该算法假设曲面光滑,点云密度变化均匀,不能在三角化的同时对曲面进行平滑和孔洞修复。 1.2 实现过程 (1)先将点云通过法线投影到某一二维坐标平面内 (2)然后对投影得到的点云做平面内的三角化,从而得到各

数字化转型中的人才技能重建
当前,产业数字化已成为经济发展的最大确定性。在“新基建”等政策引导下,以数字、信息经济为内核的基础设施、资源要素逐渐丰富,制造、物流、零售、金融、农业等产业在数字化转型过程中爆发出相当高的效率提升和边际产出,而数字化人才的培育则因其技能场景极具个性化、人才培养与组织环境不嵌套等问题成为企业实现数字化能力的主要瓶颈。 该报告旨在探讨企业在数字化人才培育方面的主要困境、基本思路、以及可行的路径措
神经重建在自动驾驶模拟中的应用
验证自动驾驶软件需要数百万公里的测试。这不仅意味着系统开发周期长,而且系统的复杂度也会不断增加,同时,大规模的实车测试也会耗费巨量的资源并且可能会面临未知的安全问题。aiSim这样的虚拟仿真工具可以减轻真实世界测试的负担。 AD和ADAS系统依靠闭环验证来确保安全性和性能。然而,实现闭环评估需要一个能够准确代表真实世界场景的3D环境。虽然这些3D环境可以由3D设计工程师手工构建,但这种方案很难解
C++ 重建二叉树(递归方法)
/*** struct TreeNode {* int val;* struct TreeNode *left;* struct TreeNode *right;* TreeNode(int x) : val(x), left(nullptr), right(nullptr) {}* };*/#include <vector>class Solution {public:/*** 代码

代码随想录算法训练营第31天| 134. 加油站、135. 分发糖果、860.柠檬水找零、 406.根据身高重建队列
134. 加油站 题目链接:134. 加油站 文档讲解:代码随想录 状态:so easy 思路:每次遍历时,如果当前的油量差(currTank)小于0,说明从当前起点无法到达下一个加油站。此时,将下一个加油站设为新的起点,并重置当前油量差(currTank)。最后检查总的油量差(totalTank),如果总的油量差大于等于0,说明存在一个合法的起点,使汽车能绕完整个环形路;否则不存在
代码随想录算法训练营Day31| 134. 加油站 , 135. 分发糖果 ,860.柠檬水找零 , 406.根据身高重建队列
今天的题目真的写的我一肚子气,真的太气了,一道题都写不出来,再听完题解后,还是觉得没有完全理解,果然菜是原罪,我还是太弱了,继续加油吧!来看今天的第一题 134. 加油站:代码随想录 这道题目的意思就是说一个路上有n个加油站,你现在的初始状态下油是0,你可以选择从一个加油站开始,看你是否能绕路行驶一圈,这道题我想到了,将他所给的gas数组减去cost数组,然后来选,但是我不知道的是怎么来

【稀疏三维重建】Flash3D:单张图像重建场景的GaussianSplitting
项目主页:https://www.robots.ox.ac.uk/~vgg/research/flash3d/ 来源:牛津、澳大利亚国立 提示: 文章目录 摘要1.引言2.相关工作3.方法3.1 背景:从单个图像中重建场景3.2 单目 4.实验4.14.2 跨域新视角合成4.3 域内新视图合成4.4 域内新视图合成 摘要 Flash3D,一种通用的单一图像场景重建。

Django删除数据库表格后如何重建-实践笔记
最近在我的三丰云服务器上完善项目代码时遇到了一个问题,特此做个笔记。 我在三丰的免费服务器上运行了一个Django框架,昨天想修改一下models的数据结构,然后不小心被我玩坏了,废了好大劲才处理好。我把数据表删除重新创建了。 下面记录一下重建数据表的过程: 先炫个图,哈哈 1、在数据库中删除需要重建的数据表 2、数据库里有一个记录生成表格的记录的表,django_makemigratio
基于新型切片轮廓转换超分辨率的深度生成网络的高分辨率3D MRI重建
高分辨率磁共振成像(MRI)序列,如3D Turbo或快速自旋回波(TSE/FSE)成像,在临床上备受欢迎,但在转换成首选方向时往往因扫描时间过长而产生模糊问题。因此,常常采用多层面二维(2D)TSE成像,因其高平面分辨率而被广泛使用,但在临床上由于体素拉长和由于阶梯状伪影而导致的横向分辨率不佳,以及由于无法生成多平面重建而受到限制。因此,需要在不同的正交成像平面上获取多个2D TSE扫描,而这样
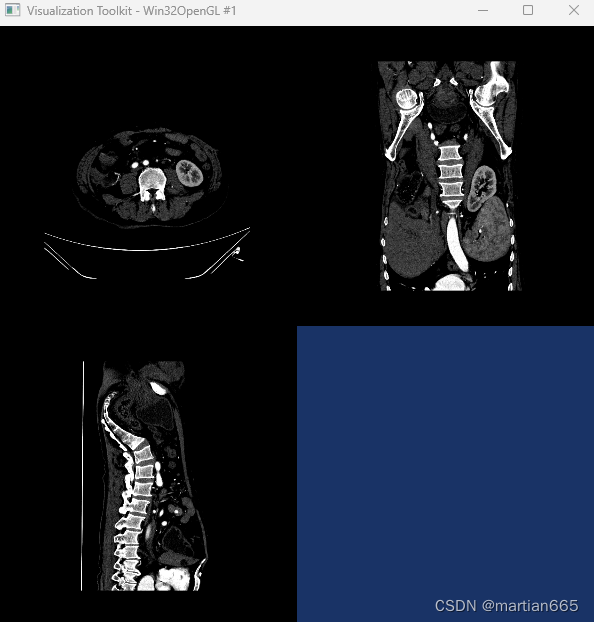
基于VTK9.3.0+Visual Studio2017 c++实现DICOM影像MPR多平面重建
开源库:VTK9.3.0 开发工具:Visual Studio2017 开发语言:C++ 实现过程: void initImageActor(double* Matrix, double* center, vtkSmartPointer<vtkImageCast> pImageCast,vtkSmartPointer<vtkImageReslice> imageReslice, vtk