gnss专题

GNSS CTS GNSS Start and Location Flow of Android15
目录 1. 本文概述2.CTS 测试3.Gnss Flow3.1 Gnss Start Flow3.2 Gnss Location Output Flow 1. 本文概述 本来是为了做Android 14 Gnss CTS 的相关环境的搭建和测试,然后在测试中遇到了一些问题,去寻找CTS源码(/cts/tests/tests/location/src/android/locat

【GNSS接收机】开源导航接收机
Pocket SDR Pocket SDR是一款基于软件无线电(SDR)技术的开源GNSS(全球导航卫星系统)接收机。它由名为“Pocket SDR FE”的RF前端设备、设备的一些实用程序以及用Python、C和C++编写的GNSS-SDR AP(应用程序)组成。它支持GPS,GLONASS,Galileo,QZSS,北斗,NavIC和SBAS的几乎所有信号。Pocket SDR FE设备由2

【GNSS射频前端】MA2769初识
MAX2769 芯片概述: MAX2769是一款单芯片多系统GNSS接收器,采用Maxim的低功耗SiGe BiCMOS工艺技术。集成了包括双输入低噪声放大器(LNA)、混频器、图像拒绝滤波器、可编程增益放大器(PGA)、压控振荡器(VCO)、分数-N频率合成器等在内的完整接收链。 主要特点: 支持GPS、GLONASS和Galileo接收。 不需要外部IF SAW或离散滤波器。 可编程的
NXP i.MX8系列平台开发讲解 - 4.1.3 GNSS 篇(三) - 定位模块与协议介绍
专栏文章目录传送门:返回专栏目录 Hi, 我是你们的老朋友,主要专注于嵌入式软件开发,有兴趣不要忘记点击关注【码思途远】 文章目录 目录 1. 定位模块介绍 1.1 Ublox M8N参数认识 1.2 GNSS 选型指导 2.评估软件 2.1 u-center2 2.2 Teseo-suite 2.3 其他软件 3. NMEA 协议 4. 总结 关注+星号

gnss变形监测基础(四)
一、监测站采样率 监测站的数据采样率指的是监测站在单位时间内收集数据的频率,通常以赫兹(Hz)为单位。在GNSS变形监测中,数据采样率决定了监测系统能够捕捉到的变形动态变化的详细程度和时间分辨率。 例如,一个采样率为1Hz的GNSS监测站意味着它每秒钟收集一次位置数据;而一个采样率为10Hz的监测站则每秒钟收集10次位置数据。 较高的采样率能够提供更细致的时间序列数据,有助于分析快速变化的动

北斗导航 | 多GNSS系统PPP-RTK原型系统及性能分析(2020 CPGPS全球华人导航定位协会年会)
博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 参考文献及代码下载:GPS北斗双模原理代码及书籍 博主是做视觉Vision出生——“视觉里程计,视觉SLAM”,后来找工作也是一不小心步入了卫星导航的大门,也是灰常荣幸。现在主要研究RDSS、RAIM及软件PVT导航解算。欢迎一起

北斗导航 | 北斗/GNSS精密定位:从PPP-RTK 到 Vision-PPP(第十一届中国卫星导航年会报告)
博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 参考文献及代码下载:GPS北斗双模原理代码及书籍 博主是做视觉Vision出生——“视觉里程计,视觉SLAM”,后来找工作也是一不小心步入了卫星导航的大门,也是灰常荣幸。现在主要研究RDSS、RAIM及软件PVT导航解算。欢迎一起
北斗导航 | 监测和减轻空间天气对GNSS应用的影响
================================================ 博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 ================================================ 作者:Balwinder Arora

北斗导航 | 高精度GNSS Correction Service国际标准化
================================================ 博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 ================================================ 作者:Dr. Rui Hirokaw
北斗导航 | Matlab实现GNSS接收机经纬度数据(NMEA语句)实时获取和地图绘制(Matlab源代码)
================================================ 博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 ================================================ 这个例子显示了如何从NMEA句子中

高精度GNSS模块的无人机导航
高精度GNSS模块提供更高的精度和可靠性,有助于提高无人机的安全性和效率。这些模块允许无人机遵循预定的飞行路线,与障碍物保持安全距离,并以更高的精度悬停。高精度GNSS模块广泛应用于测绘、农业建设、石油天然气、公安等行业。 GNSS模块技术的未来发展预计将提供更高的精度,并扩大无人机在各个领域的可能性。高精度GNSS模块彻底改变了无人机的导航,提供精确的精度,提高了安全性,并提高了各个行业的运营

利用GNSS IMU集成提高车道级定位精度
准确的定位对于很多不同的事情都是至关重要的。导航系统可以引导我们去某个地方,自动驾驶汽车可以利用这些数据在道路上安全行驶。尽管全球导航卫星系统(GNSS)在定位方面非常出色,但它们可能并不总是提供最准确的车道水平事实。解决这个问题的一个有希望的方法是将GNSS模块与IMU(惯性测量单元)集成。在这篇博文中,我们将探讨GNSS IMU集成如何帮助提高车道水平定位的准确性。让我们来谈谈这项技术的所有伟

GNSS地表位移监测仪的工作原理
TH-WY1GNSS地表位移监测仪是一种用于实时监测地表位移变化的仪器设备。它主要利用全球导航卫星系统(GNSS)或全球定位系统(GPS)技术,通过接收卫星信号来测量地表点位的移动变化,从而获取地表点位的精确坐标信息,进而监测地表的水平和垂直位移情况。 这种监测仪器的主要特点和功能包括高精度测量,通常可以达到毫米级别的测量精度。此外,它还具有高效率、自动化等优点,能够实现24小时全天候实

【驱动】GNSS驱动:gpsOneXTRA 援助技术
什么是 “gpsOneXTRA 援助技术”? 高通 gpsOneXTRA 的援助技术在公司的改进中扩展了 gps 芯片组, 允许通过互联网连接下载辅助 gps。芯片组为更精确的位置发现提供了更高的灵敏度, 尤其是在通常难以找到 GPS 信号的位置。 gpsOneXTRA:帮助提高了独立的性能,并简化了GNSS的帮助交付GNSS引擎,包括日历、年历、电离层、UTC、修正后的时间。可以使第一次定位
【驱动】GNSS驱动基础
GNSS:Global Navigation Satellite System(全球卫星导航系统) GPS:Global Positioning System(全球定位系统) GPS是美国的卫星导航系统。 还有,俄罗斯的GLONASS;欧盟的Galileo;中国的北斗。 这几大导航系统统称为GNSS GLONASS、Galileo、GPS、北斗这些导航卫星系统统称GNSS(Global
ROS中发布GNSS和点云PCD信息
1.发布gnss ros::Publisher pub = nh.advertise<nmea_msgs::Sentence>("/nmea_sentence", 1);// Publish all topics with the same ROS time stamp.ros::Time topic_publish_time = ros::Time::now();// === NMEA S
GNSS长基线实时定位软件的模糊度固定效果
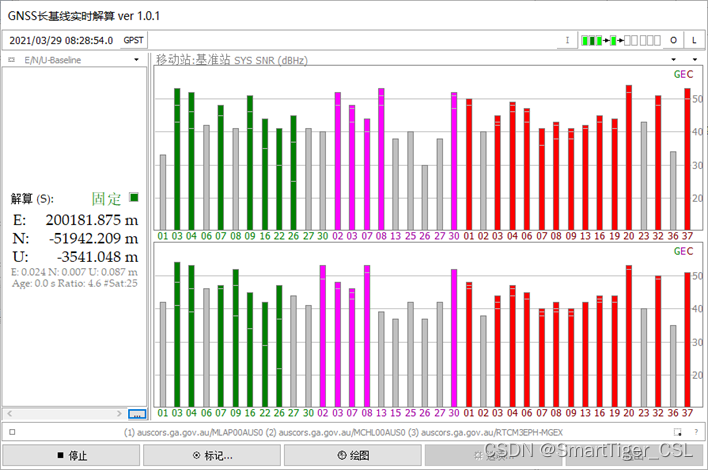
GNSS长基线实时定位软件的模糊度固定效果 在原有RTKLIB的基础上,增加了以下功能: (1)支持GPS、Galileo和BDS三系统的实时和事后两种解算方式; (2)支持双频模糊度实时固定解; (3)优化对流层延迟估计算法和实时数据通讯模块等功能; (4)支持事后文件、实时串口及NTRIP数据流; 运行视频效果如下: GNSS长基线实时相对定位软件实时模糊度
移远通信推出“全系统+全频段”GNSS定位模组LG290P,赋能高精度导航应用
近日,全球领先的物联网整体解决方案供应商移远通信正式对外宣布,其将推出全新款支持“全系统+全频段”的工规级RTK高精度GNSS定位模组LG290P,用于满足智能机器人、无人机、精准农业、测量测绘等高精度定位应用场景所需。 高精度 LG290P 作为移远通信 GNSS 高精度定位领域的重要产品代表,支持“全系统+全频段”RTK定位是其重要特性之一。该产品拥有1040个跟踪捕获通道

实践一个GNSS系统的基础理论和工程概念
摘要 \qquad 全球导航卫星系统(GNSS)使用准确、稳定的星载时钟和地面时钟为全球用户提供位置和时间服务。这些时钟具有引力和运动频移,它们是如此之大,以至于不仔细考虑众多相对论影响,系统就无法正常工作。本文基于广义相对论讨论实践一个GNSS系统的基础理论和工程概念,其中必须考虑的相对论原理及效应包括:光速不变性、等价原理、Sagnac效应、时间膨胀、引力频移、以及同步相对性。 1、系统
【GNSS】载波、测距码、导航电文
一、gps卫星载波、测距码、导航电文之间有什么关系? GPS卫星导航系统中的三个主要部分——载波、测距码和导航电文——之间存在密切的关系,它们共同构成了GPS信号的基本组成部分,用于实现卫星定位和导航功能。 1. 载波(Carrier): - 载波是由GPS卫星发射的基本信号,它是一种高频率的电磁波,携带着大量的信息。 - GPS信号的载波频率通常在L波段(1-2 GHz)。

红豆Cat 1开源|项目一: 从0-1设计一款TCP版本RTU(支持Modbus+GNSS)产品的软硬件全过程
TCP版RTU(支持Modbus+GNSS)项目概述 RTU(Remote Terminal Unit),中文即远程终端控制系统,负责对现场信号、工业设备的监测和控制。RTU是构成企业综合自动化系统的核心装置,通常由信号输入/出模块、微处理器、有线/无线通讯设备、电源及外壳等组成,由微处理器控制,并支持网络系统。它实现企业中央监控与调度系统对生产现场一次仪表的遥测、遥控、遥信和遥调等功能。R

基于ES-EKF的LiDAR/GNSS/IMU传感器融合轨迹估计(附项目源码)
基于改进EKF的LiDAR/GNSS/IMU传感器融合轨迹估计(附项目源码) 算法概述PredictionCorrectionES-EKF算法融合算法实现轨迹估计实验结果 最近在研究传感器融合,看到一个很好的开源项目,适合小白学习,为以后做传感器融合、SLAM、自动驾驶和室内定位等方向打下基础。 算法概述 题目:基于改进扩展卡尔曼滤波(Error State-EKF)的LiD
北斗导航 | 3D LiDAR辅助GNSS NLOS缓解用于城市峡谷中可靠的GNSS-RTK定位
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===================================================== 3D LiDAR
利用TCP发布GNSS数据(ROS2转ROS1)
文章目录 服务端(ROS2)客户端(ROS1) 服务端(ROS2) #include <memory>#include <iostream>#include <sstream>#include <string>#include <sys/socket.h>#include <netinet/in.h>#include <unistd.h>#include <cstr
GNSS时间转换程序设计
GNSS中常见的时间类型:UTC、GPST、BDST、儒略日、年积日 doy(day of year) 本文主要围绕UTC、GPST、BDST、儒略日之间的相互转换,内容包括程序设计思路、预期功能、算例及结果分析的阐述,以及笔者对编程过程中一些常见问题和注意事项的总结。 代码详见: https://download.csdn.net/download/m0_58307078/88

GNSS时间转化(GPS时-儒略日-年月日时分秒)
使用python进行时间转换代码如下: 代码引用自:https://blog.csdn.net/qq_40185784/article/details/104956594 import mathdef cal2mjd(cal):# cal2jd 将公历年月日时分秒转换到简化儒略日。# 输入公历时间列表,返回儒略日if (len(cal) < 6):for i in range(len(c