rosbag专题

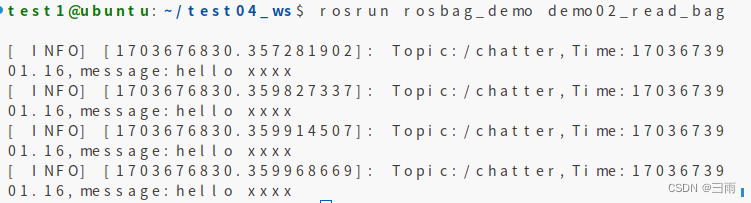
ROS - C++实现RosBag包回放/提取
文章目录 1. 回放原理2. 回放/提取 多个话题3. 回放/提取数据包,并实时发布 1. 回放原理 #include <ros/ros.h>#include <rosbag/bag.h>#include <std_msgs/String.h>int main(int argc, char** argv){// 初始化ROS节点ros::init(argc, argv,
ROS - C++实现RosBag包录制
文章目录 1. 录制原理2. 录制多个话题3. 订阅ROS消息,实时录制 1. 录制原理 #include <ros/ros.h>#include <rosbag/bag.h>#include <std_msgs/String.h>int main(int argc, char** argv){// 初始化ROS节点ros::init(argc, argv, "reco

使用 rosbag play 更改bag包发布的话题名称
在ROS开发中,有时我们需要回放已记录的ROS包文件(.bag),并将其中某个话题的数据重新映射到一个新的话题。这在数据处理、调试和系统集成时非常有用。例如,我们可能有一个记录了点云数据的ROS包文件,其中点云数据发布在 /kitti/velo/pointcloud 话题上,但我们的系统期望从 /velodyne_points 话题接收点云数据。这时,我们可以使用 rosbag play 命令来
【ROS使用记录】—— ros使用过程中的rosbag录制播放和ros话题信息相关的指令与操作记录
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、rosbag的介绍二、rosbag的在线和离线录制三、rosbag的播放相关的指令四、其他rosbag和ros话题相关的指令总结 前言 rosbag是ROS(机器人操作系统)中用于记录和回放数据的工具。录制数据可以帮助开发者在不同时间重新播放和分析实验数据,便于调试和验证算法。通过记录
ROS常用组件_rosbag数据记录与回放
rosbag数据记录与回放 为了方便调试测试,ROS提供了数据记录与数据回放的功能包——rosbag,可以帮助开发者收集ROS系统运行时的消息数据,然后在离线状态下回放。 记录数据 首先启动程序节点 然后查看当前话题 $ rostopic list -v 进入希望存放记录的文件夹后,使用rosbag抓取话题的消息 $rosbag record -a -a参数代表记录所有发布的消息

从rosbag解析视频
1.使用的包 sudo apt-get install mjepgtoolssudo apt-get install ffmpeg 2.解析图片 roslaunch bag2jpg.launch <launch><node pkg="rosbag" type="play" name="rosbag" args="-d 2 /media/nvidia/'My Passport'/cam
使用Pointpillar神经网络识别rosbag中的障碍物
PointPillar-ROS-Node https://github.com/MengWoods/pointpillar-ros-node 调试了一份可以使用的Pointpillar ROS node代码,并发布到了上面的仓库。 运行Node,并play rosbag,使用rviz就可以显示障碍物的BBox。 具体可以参考repo的README文档,文档非常详细的记录了如何使用与环境设置。

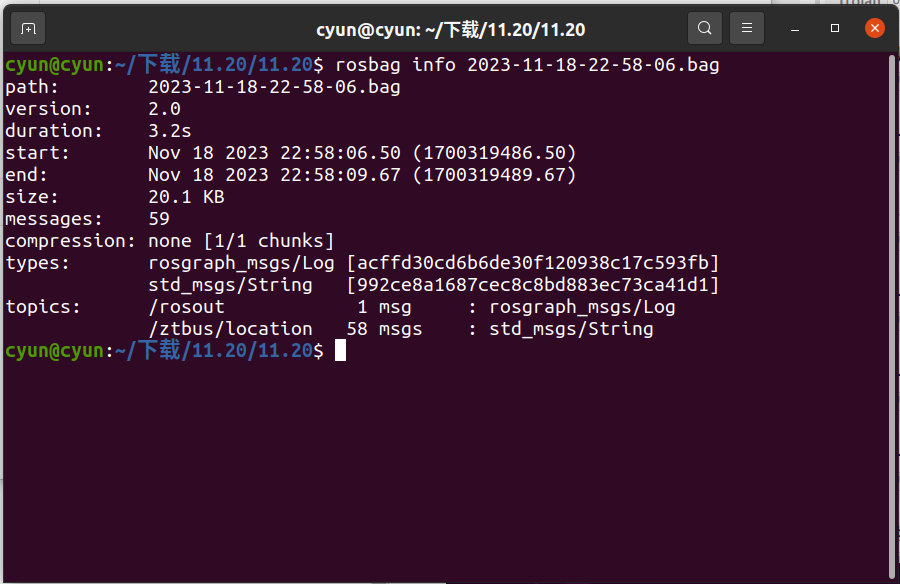
【rosbag】rosbag命令--查看提取bag中的内容
1.rosbag info 查看bag消息 rosbag info --.bag topics是其中的话题内容,/imu中只写了包含imu的数据,但是imu是9轴的,到底磁力计信息是否包含在其中呢? 2.将bag中的某个话题转为txt 将file_name.bag文件中topic_name话题的消息转换到Txt_name.txt文件中: rostopic echo -b file_na
![[ROS 系列学习教程] rosbag Python API](https://img-blog.csdnimg.cn/direct/d90a65e3a44a446d9da741646a4070c4.png#pic_center)
[ROS 系列学习教程] rosbag Python API
ROS 系列学习教程(总目录) 本文目录 1. 构造函数与关闭文件2. 属性值3. 写bag文件内容4. 读bag文件内容5. 将bag文件缓存写入磁盘6. 重建 bag 文件索引7. 获取bag文件的压缩信息8. 获取bag文件的消息数量9. 获取bag文件记录的起止时间10. 获取话题信息与消息类型 rosbag 的 Python API 主要位于 rosbag 包的 Bag
第 5 章 ROS常用组件-rosbag(自学二刷笔记)
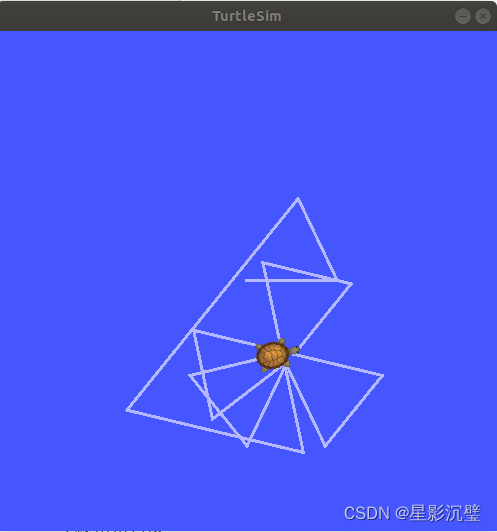
重要参考: 课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ 讲义链接:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程 5.2.1 rosbag使用_命令行 需求: ROS 内置的乌龟案例并操作,操作过程中使用 rosbag 录制,录制结束后,实现重放 实现: 1.准备 创建目
![[ROS 系列学习教程] rosbag C++ API](https://img-blog.csdnimg.cn/direct/5f927cceba4d474da5b8887bc77d34e4.png#pic_center)
[ROS 系列学习教程] rosbag C++ API
ROS 系列学习教程(总目录) 本文目录 一、rosbag::Bag1.1 常用接口1.2 其他接口 二、rosbag::View2.1 常用接口2.1.1 代码示例 rosbag 的 C++ API 主要有两个类,用于写bag文件的Bag类,和用于读bag文件的View类。 一、rosbag::Bag 用于写bag文件。 头文件:bag.h 1.1 常用接口 #
![[ROS 系列学习教程] rosbag 命令行介绍](https://img-blog.csdnimg.cn/direct/682ba61fb6d2499bb549fec99e0c31a7.png#pic_center)
[ROS 系列学习教程] rosbag 命令行介绍
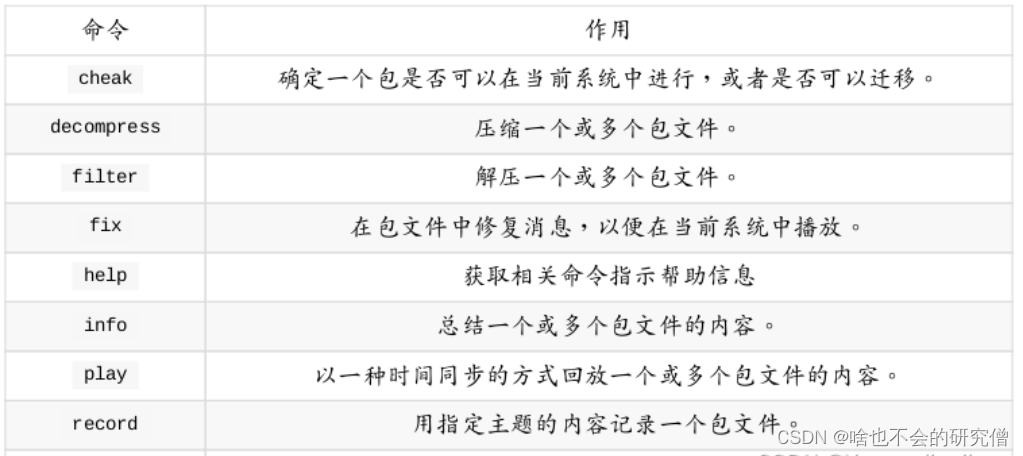
ROS 系列学习教程(总目录) 本文目录 rosbag 命令行1.1 rosbag check1.2 rosbag compress1.3 rosbag decompress1.4 rosbag filter1.5 rosbag fix1.6 rosbag info1.7 rosbag play1.8 rosbag record1.9 rosbag reindex 有时我们需要
解决ROS中 rosbag play bag 包遇到:Required ‘op‘ field missing问题
在Robot Operating System (ROS)中使用rosbag play命令回放bag文件时,可能会遇到一个错误消息:“Required 'op' field missing”。这个问题通常指示bag文件有损坏或格式不兼容,阻止了正常的消息回放。本文档将指导你如何诊断和解决这个问题。 问题原因 遇到“Required 'op' field missing”错误的原因主要有:

T265录制的rosbag拆包:拆IMU序列和图像序列方法以及如何制作双目euroc、双目tum数据集
目录 1.录制bag包 2.左右目图像的拆解 3.拆IMU数据 4.如何制作eruoc与tum数据集 4.1 eruoc数据集格式 4.2 对齐时间戳 4.3 编写imu.csv文件 4.4 生成索引文件 4.一个脚本完成拆包 1.录制bag包 这里推荐我的同学的博客,大家可以参考这篇博客录制T265的ros包并解决一些问题: 使用 RealSe
rqt查看rosbag中视频的方法
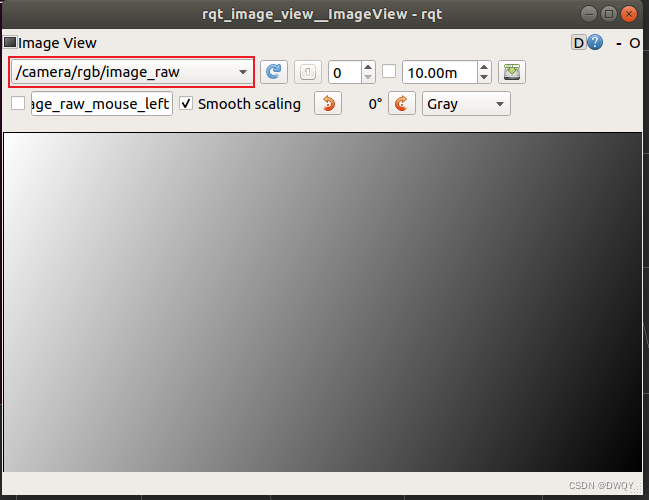
1. 播放bag视频 执行: rosbag play xxx.bag 2. 打开rqt_image_view 执行: rqt_image_view 3. 在选择话题处选择图片话题
利用rosbag命令将compressed图像数据格式转为raw
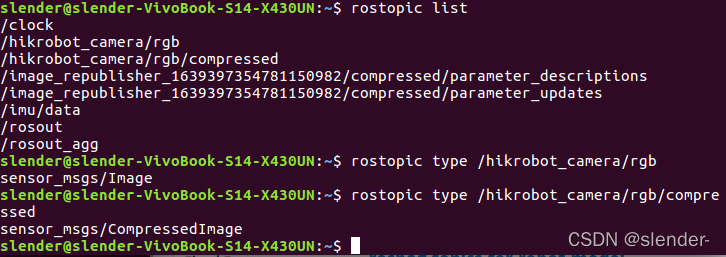
利用rosbag命令将compressed图像数据格式转为raw 1 kalibr使用compressed图像格式2 compressed转为raw3 使用image_view查看compressed图像 最近用了一个新的相机,拿到的数据集图像是经过压缩的compress格式,在使用kalibr标定以及运行SLAM代码的时候发现压缩格式经常遇到问题,在此进行记录. 1 kali
rosbag 源码阅读笔记-1
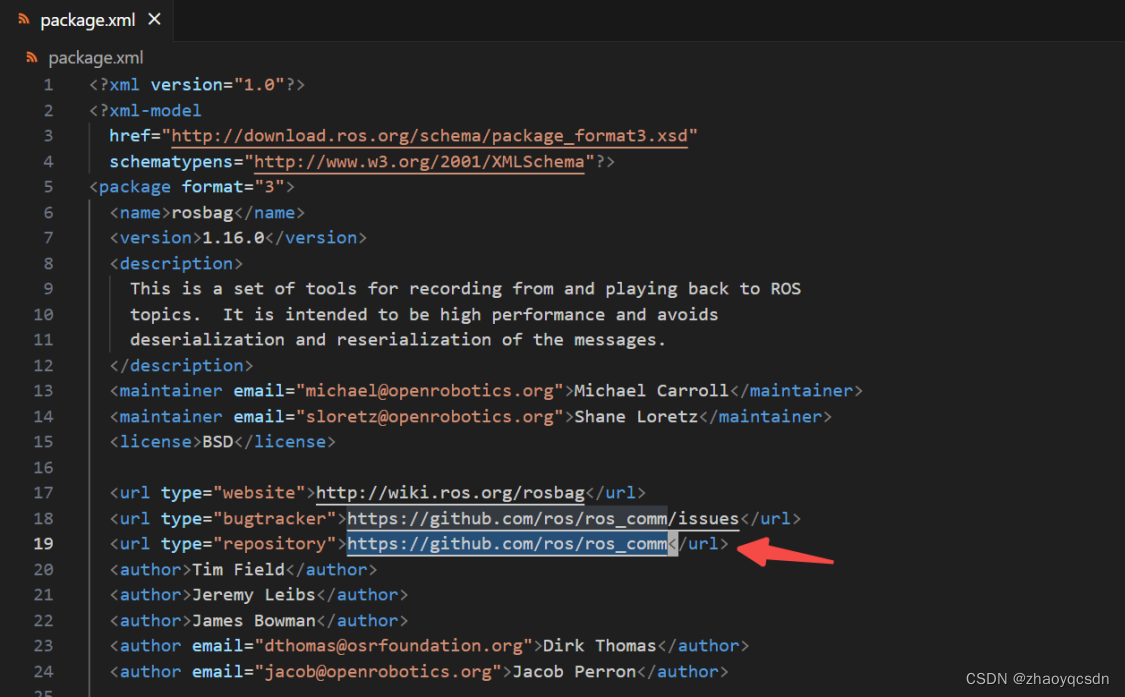
这篇文字想通过在自己的机器上查找rosbag的源码在哪里(而不是通过google搜索),来和大家分享一些ros和python的常用命令,了解一下rosbag的调用过程。 怎么查到源码在哪里 当然我们可以直接上ros的官网去查看,路径在这里:https://wiki.ros.org/rosbag 本着程序员的好奇心,我们也可以不看官方文档,自己先去探索一下: 我们先来看看我们日常用的rosba
ROS-rosbag
文章目录 一、命令行二、编码 机器人传感器获取到的信息,有时我们可能需要时时处理,有时可能只是采集数据,事后分析,比如: 机器人导航实现中,可能需要绘制导航所需的全局地图,地图绘制实现,有两种方式,方式1:可以控制机器人运动,将机器人传感器感知到的数据时时处理,生成地图信息。方式2:同样是控制机器人运动,将机器人传感器感知到的数据留存,事后,再重新读取数据,生成地图信息。两种
mp4视频转rosbag文件(图片压缩格式)
目录 目的 环境 主要步骤 创建py文件 执行py文件 效果 程序解释 后续调整 目的 将相机录制的mp4格式文件,转为ROS系统能使用的bag格式文件。 环境 安装有ROS和python2 主要步骤 创建py文件 新建python文件Video2ROSbag.py #this is ok# -*- coding: utf-8 -*-import ro
ROS笔记之rosbag的合并与拼接merge_bag.py
ROS笔记之rosbag的合并与拼接merge_bag.py 代码来源:https://www.clearpathrobotics.com/assets/downloads/support/merge_bag.py 使用方法: python merge_bag.py 输出命名.bag 输入1.bag 输入2.bag 输入3.bag … 代码文件:merge_bag.py #!/usr/b
ROSBAG中提取图片
参考:利用ROS工具从bag文件中提取图片-CSDN博客 5. 用ros工具从bag文件中提取图片 1). 首先需要安装一些图片处理依赖的包: MJPEG, ffmpeg $ sudo apt-get install mjepgtools $ sudo apt-get install ffmpeg 2). 新建文件夹用于储存提取后的图片,并执行: $ rosrun imag

rosbag录制的bag文件修复
参考链接:【ROS】ERROR bag unindexed错误解决 在使用.bag文件时遇到的报错: rosbag.bag.ROSBagUnindexedException: Unindexed bag 使用命令查看bag: rosbag info re.bag(bag_name) 此时会报错: ERROR bag unindexed: re4.bag. Run rosbag reind
ROS学习笔记(5):rviz和rosbag数据记录、回放
1.rviz 1.前提 rviz-三维可视化平台可以满足ROS针对机器人的可视化需求。在Gazebo那里也可以看到rviz可以让模型显示在rviz上。 2.rviz的安装与运行 1.rviz的安装 sudo apt-get install ros-melodic-rviz 2.rviz的运行 roscorerviz/rosrun rviz rviz 3.rviz界面

大文件rosbag播放太慢问题解决
录制得到的原始bag包为slam_2019-12-14-23-24-43.bag, 我使用rosbag filter工具将其中某些消息过滤出来了,使用的指令为 rosbag filter slam_2019-12-14-23-24-43.bag slam_2019-12-14-23-24-43_filter.bag "topic == '/lslidar_point_cloud' or top
rosbag 的常用命令
文章目录 1、录制数据包2、查看数据包信息3、数据包播放4、数据包过滤5、切割数据包 1、录制数据包 // cd到目标文件夹下rosbag record –a // 录制所有topic的数据包,不光包括正在播的bag里有的rosbag record /topic_a /topic_2 // 录制topic_1/topic_2的数据包rosbag record