pedestrian专题

Attribute Recognition简记1-Video-Based Pedestrian Attribute Recognition
创新点 1.行人属性库 2.行人属性识别的RNN框架及其池化策略 总结 先看看行人属性识别RNN结构: backbone是ResNet50,输出是每一帧的空间特征。这组特征被送到两个分支,分别是空间池化和时间建模。最后两种特征拼接。然后分类(FC)。 LSTM关注帧间变化。受cvpr《Recurrent Convolutional Network for Video-Based Person

行人轨迹论文阅读SSAGCN: Social Soft Attention Graph Convolution Network for Pedestrian Trajectory Prediction
SSAGCN: Social Soft Attention Graph Convolution Network for Pedestrian Trajectory Prediction SSAGCN:用于行人轨迹预测的社会软注意力图卷积网络 Abstract- 行人轨迹预测是自动驾驶的一项重要技术,近年来已成为研究热点。为了准确预测行人未来的合理轨迹,不可避免地要同时考虑行人之间的社交互动和周围
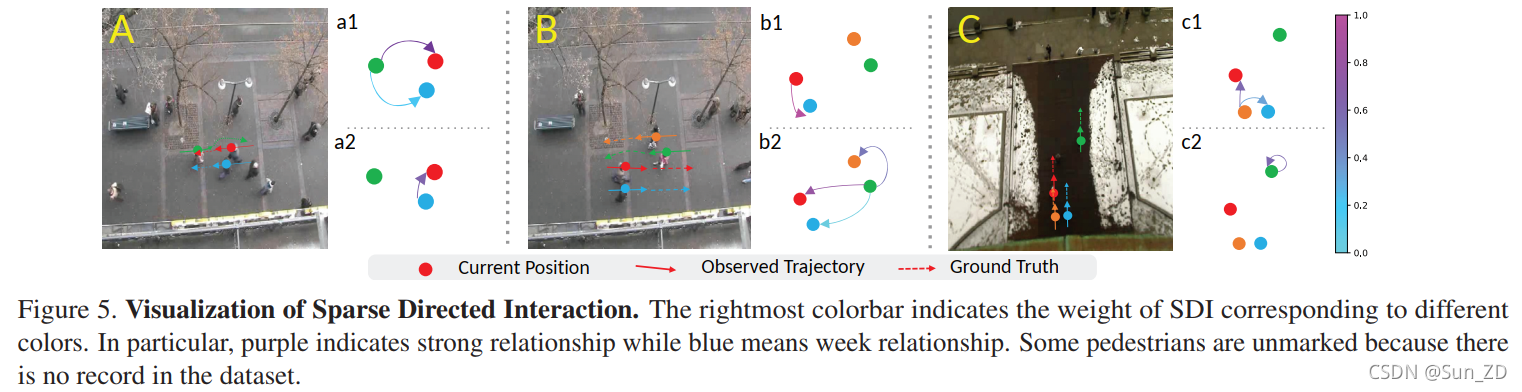
论文翻译 SGCN:Sparse Graph Convolution Network for Pedestrian Trajectory Prediction 用于行人轨迹预测的稀疏图卷积网络
SGCN:Sparse Graph Convolution Network for Pedestrian Trajectory Prediction 用于行人轨迹预测的稀疏图卷积网络 行人轨迹预测是自动驾驶中的一项关键技术,但由于行人之间复杂的相互作用,该技术仍具有很大的挑战性。 然而,以往基于密集无向交互的研究存在建模冗余交互和忽略轨迹运动趋势等问题,不可避免地与实际存在较大偏差。 针对这些问

Adaptive NMS: Refining Pedestrian Detection in a Crowd
这两年不少人在做NMS的优化工作。NMS是检测的后处理工作,在RCNN系列算法中,会从一张图片中找出很多个候选框(可能包含物体的矩形边框),NMS就是去除冗余矩形框的过程。具体流程如下: 对于Bounding Box的列表B及其对应的置信度S,采用下面的计算方式.选择具有最大score的检测框M,将其从B集合中移除并加入到最终的检测结果D中.通常将B中剩余检测框中与M的IoU大于阈值Nt的框从B

How Far are We from Solving Pedestrian Detection?
摘要 作者从 传统方法 和 最近比较火的convnets 来分析当前行人检测出错的地方,错误主要包括两种:定位(localisation)错误;和前景背景区分错误。并提出了一个经过新的校准的Caltech dataset. 一、引言 1. 定位问题是 导致high confidence的虚警的重要原因,解决这个问题的途径是提高训练集的标注信息的准确度;前景背景的区分度可以通

解读:WIDER Face and Pedestrian Challenge人脸检测部分论文+代码集合
数据集:WIDER Face 1 PyramidBox 1803_PyramidBox:A Context-assisted Single Shot Face Detector. 论文:https://arxiv.org/pdf/1803.07737.pdf GitHub:https://github.com/EricZgw/PyramidBox 1) 思想简介 联系上下文(head,bo

Paper Reading: High-level Semantic Feature Detection: A New Perspective for Pedestrian Detection
Paper Reading Note URL: https://arxiv.org/pdf/1904.02948v1.pdf TL;DR 本篇文章采用anchor-free的方法解决目标检测的问题。 作者认为可以用中心点和尺度这种high-level语义特征代替边缘、blob等low-level语义特征。 Algorithm 模型框架如下: 该算法主要分为Feature Extract
文献及代码阅读报告 - SS-LSTM:A Hierarchical LSTM Model for Pedestrian Trajectory Prediction...
概览 简述 SS-LSTM全称Social-Scene-LSTM,是一种分层的LSTM模型,在已有的考虑相邻路人之间影响的Social-LSTM模型之上额外增加考虑了行人背景的因素。SS-LSTM架构类似Seq2Seq,由3个Encoder生成的向量拼接后形成1个Decoder的输入,并最终做出轨迹预测,有关Encoder和Decoder具体细节下文介绍。 主要结论与贡献 提出了SS-LSTM

论文解读---Frozone: Freezing-Free, Pedestrian-Friendly Navigation in Human Crowds
原文题目:Frozone: Freezing-Free, Pedestrian-Friendly Navigation in Human Crowds (Frozone:在人群中的无停留、行人友好导航) 原文作者:Adarsh Jagan Sathyamoorthy, Utsav Patel, Tianrui Guan, and Dinesh Manocha 论文地址:https://arxi

【论文解读】Count- and Similarity-aware R-CNN for Pedestrian Detection(基于计数和相似度感知的R-CNN用于行人检测)
论文题目:Count- and Similarity-aware R-CNN for Pedestrian Detection 论文出处:European Conference on Computer Vision(ECCV)2020 论文链接:文章下载 代码链接:代码 一、创新点 提出了计数和相似性分支网络——count-and-similarity branch(CSB)提出了计数加权检测