part4专题

代码随想录冲冲冲 Day36 动态规划Part4
又一次越来越感受到了动规的“魅力”,头发又开始掉了 1049. 最后一块石头的重量 II 1.dp数组 dp[j]中的 j是 背包为j的情况下 最多能背的石头的最大量 2.dp数组初始化 首先dp[j]中j表示的是容量 那么这个容量最大值就是所有石头的总重量 因为提示中给出1 <= stones.length <= 30,1 <= stones[i] <= 1000,所以最大重量就是3

最长的一帧学习 part4
文章目录 九、osgUtil:: SceneView::draw ()part1 初始化osg::State类的GL库函数,判断是否使用场景视图初始化访问器(SceneView::setInitVisitor)part2 针对非立体显示的后续操作part2.1 osgUtil::RenderStage::drawPreRenderStagespart2.2 osgUtil::RenderSt
Part4-DOM学习笔记-获取元素属性及节点操作
6.获取元素属性 6.1 获取元素属性 获取元素的属性有两种方式: element.属性: 获取内置属性值,元素本身自带的属性 不能获取自定义属性 代码示例如 console.log(div.id) element.getAttribute(‘属性’): 可以获取内置属性值 可以获取自定义属性 代码示例如下: console.log(div.getAttribute('i

算法训练 | 动态规划Part4 | 3. 416.分割等和子集、1049.最后一块石头的重量 II、494.目标和
目录 416.分割等和子集 动态规划法 1049.最后一块石头的重量 II 动态规划法 494.目标和 XXX法 416.分割等和子集 题目链接:416. 分割等和子集 - 力扣(LeetCode) 文章讲解:代码随想录 动态规划法 解题思路 背包的体积为sum / 2 背包要放入的商品(集合里的元素)重量为 元素的数值,价值也为元素的数值 背包如果正好
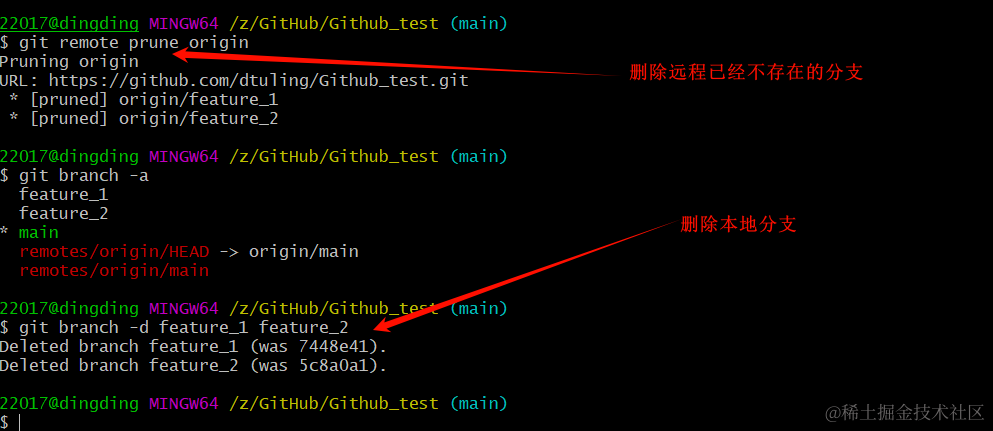
Git--Part4--多人协作
theme: nico 在之前的Git博客中,已经把Git本地相关的操作以及远程操作的介绍完了。如下: Git–Part1–基础操作 - 掘金 (juejin.cn)Git–Part2–分支管理 - 掘金 (juejin.cn)Git–Part3–远程操作 & 配置 & 标签管理 - 掘金 (juejin.cn) 这篇文章会介绍两种使用Git开发多人协作的场景。以及常遇到的问题。

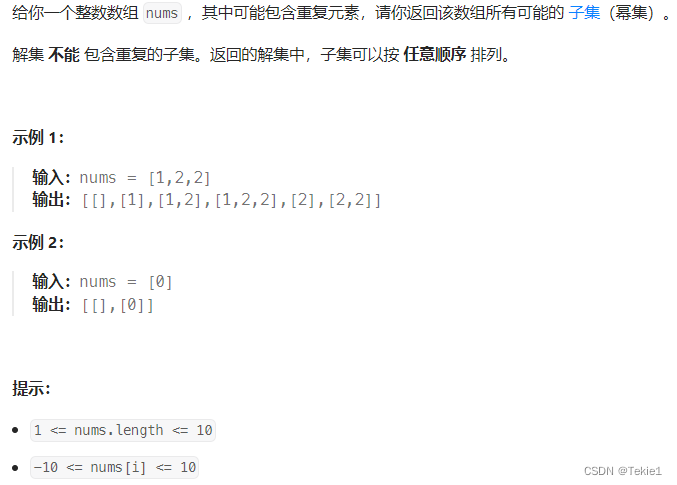
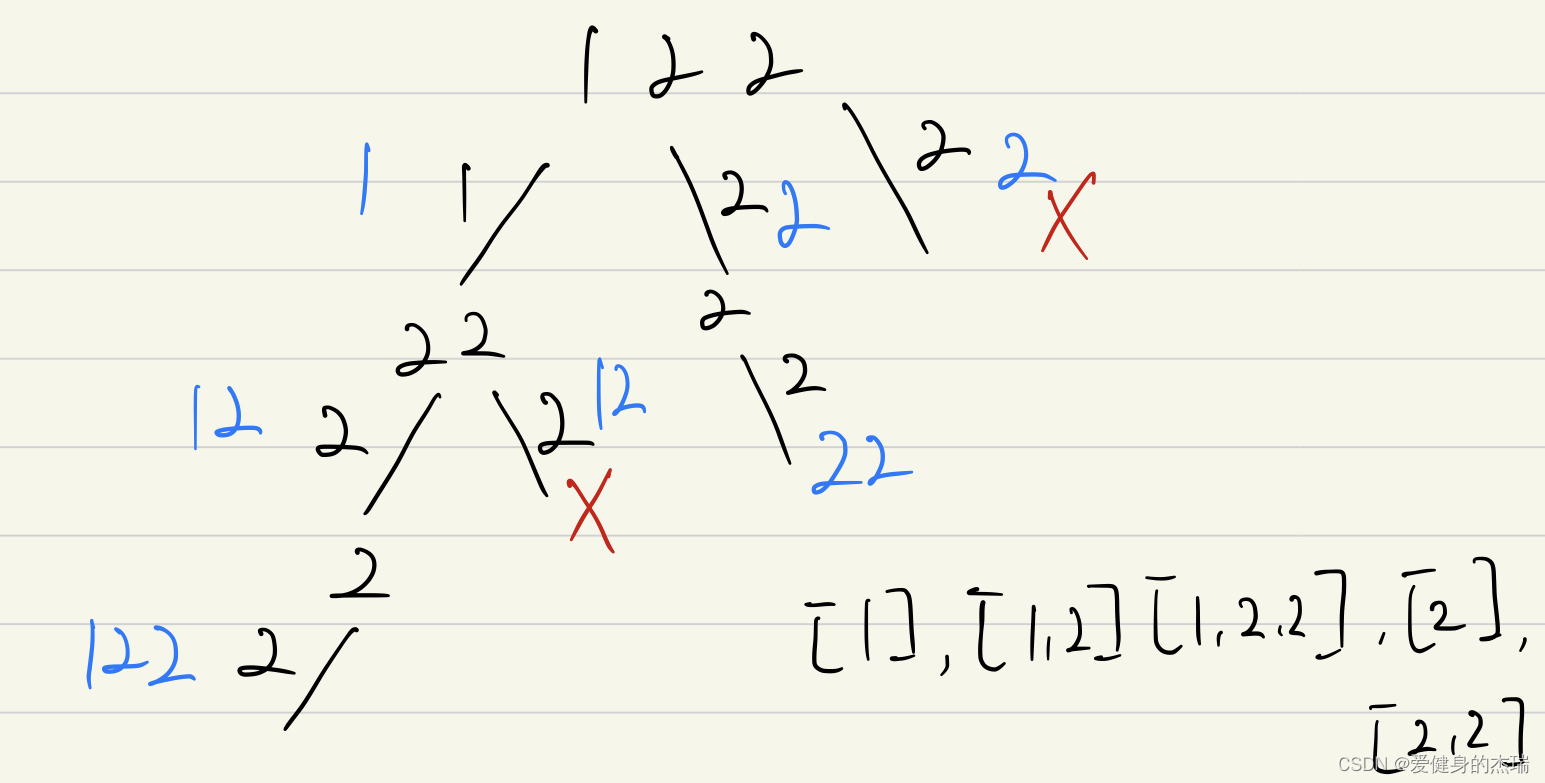
算法训练 | 回溯算法Part4 | 93.复原IP地址、78.子集、90.子集II
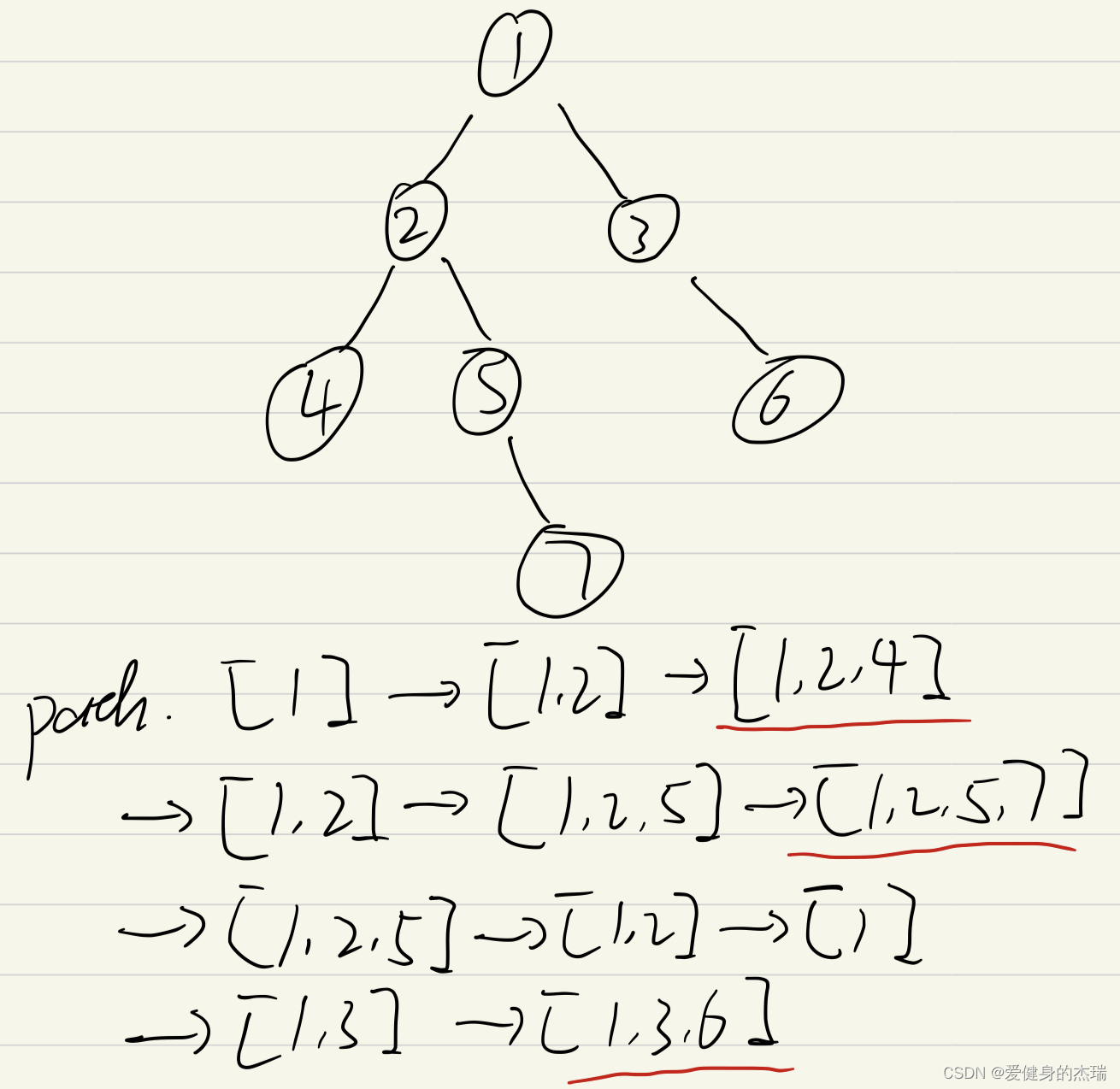
目录 93.复原IP地址 回溯法 78.子集 回溯法 90.子集II 回溯法 93.复原IP地址 题目链接:https://leetcode.cn/problems/restore-ip-addresses/ 文章讲解:代码随想录 回溯法 解题思路 切割问题就可以使用回溯搜索法把所有可能性搜出来 解题步骤 递归参数:startIndex一定是需要的,因
代码随想录第24天|回溯part4 寻找切割点
93.复原ip地址 寻找切割点,但是需要注意的是,切割点(即.号)只有三个 将需要拼凑的值先放进一个数组里,等满足条件后再将其拼成字符串 class Solution {public:vector<string> res;vector<int> path;int check(string s) {if (s.size() > 1 && s[0] == '0')return -1;if (s

【力扣一刷】代码随想录day42(动态规划part4 - 背包问题专题:卡码网46.携带研究材料、416.分割等和子集 )
目录 【卡码网46. 携带研究材料】 方法一 01背包问题 - 二维数组 方法二 01背包问题 - 一维数组 【416. 分割等和子集】 方法一 暴力回溯 -> 超时 方法二 动态规划(01背包问题) 【卡码网46. 携带研究材料】 方法一 01背包问题 - 二维数组 思路: 1、确定 dp[i][j] 的含义 dp[i][j] 是指从 0 ~ i 件物品中选部分物
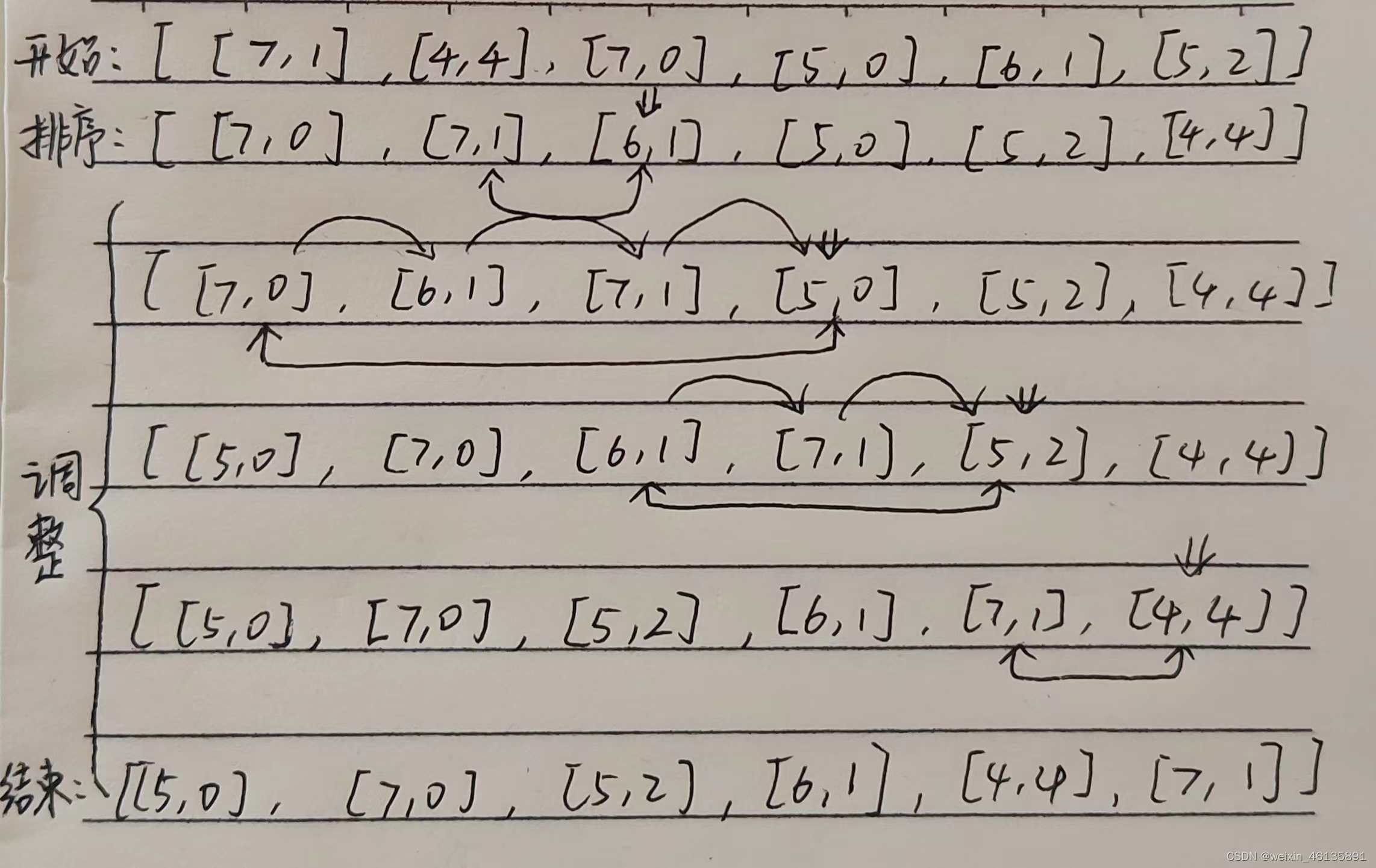
【力扣一刷】代码随想录day35(贪心算法part4:860.柠檬水找零、406.根据身高重建队列、452. 用最少数量的箭引爆气球 )
目录 【860.柠檬水找零】简单题(很简单) 【406.根据身高重建队列】中等题(掌握思路后简单) 【452. 用最少数量的箭引爆气球】中等题 【860.柠檬水找零】简单题(很简单) 思路: 5元的直接收,不需要找钱10元的只需要找5元20元的优先找10元,没有10元再全部找5元 class Solution {public boolean lemonadeChange(int[
代码随想录Day28:回溯算法Part4
Leetcode 93. 复原IP地址 讲解前: 这道题其实在做完切割回文串之后,学会了使用切割的方法来找到字符串的possible 子串之后,思路就会很快找到,细想一下其实无非也就是对given string然后进行切割,只是深度是固定的因为ip只能有四组数字组成,也就是四个sub string,然后呢我们就需要找到所有的possible组合,并且确保组合中每一个substring是符合规则

ubuntu-server部署hive-part4-部署hive
参照 https://blog.csdn.net/qq_41946216/article/details/134345137 操作系统版本:ubuntu-server-22.04.3 虚拟机:virtualbox7.0 部署hive 下载上传 下载地址 http://archive.apache.org/dist/hive/ apache-hive-3.1.3-bin.
代码随想录Day17:二叉树Part4
Leetcode 110. 平衡二叉树 讲解前: 这道题其实稍微花了点心思,但是最终想出来解法的时候回过头来看并不是那么麻烦,对于平衡二叉树其实就是一个理念,我们要保证无论是树中的任何一个节点,其左右子树的深度差别不能大于1,所以很显然这是一个递归的问题,遍历所有的root然后去查看他们的高度差,可是原方程返回的是一个Boolean,这样显然没办法帮助我们实现递归,同时子树的高度需要的是一层一
代码随想录day36:动态规划part4,背包问题
文章目录 day36:动态规划part4,背包问题01背包416.分割等和子集 day36:动态规划part4,背包问题 01背包 https://kamacoder.com/problempage.php?pid=1046 二维数组版本: dp[i][j]里的i和j表达的是什么了,i是物品,j是背包容量。 dp[i][j] 表示从下标为[0-i]的物品里任意取,放进
![[足式机器人]Part4 南科大高等机器人控制课 Ch01 Linear Differential Equations and Matrix Exponential](https://img-blog.csdnimg.cn/direct/8be5c97036b544e78a0eee06203358a0.png#pic_center)
[足式机器人]Part4 南科大高等机器人控制课 Ch01 Linear Differential Equations and Matrix Exponential
本文仅供学习使用 本文参考: B站:CLEAR_LAB 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch01 Linear Differential Equations and Matrix Exponential 1. ODEs-Ordinary Differential Equations1.1 Dynamics of 2R linkage1.1.1
《Python网络爬虫与数据挖掘小课堂》——part4
Requests库的入门-python 01 简介 Requests库是Python HTTP 库。 Requests作用:自动爬取HTML页面/自动提交网络请求。 Requests库项目地址:http://docs.python-requests.org/en/master/ 中文下载地址:http://docs.python-requests.org/zh_CN/latest/ 02 安
剑指offer 66题 part4(19~24题)
第十九题: 题目: 输入一个矩阵,按照从外向里以顺时针的顺序依次打印出每一个数字,例如,如果输入如下矩阵: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 则依次打印出数字1,2,3,4,8,12,16,15,14,13,9,5,6,7,11,10. 题解: 这里要注意的是,这个矩阵不是n*n ,他的行列数可以不相等 解题思路:把打印数字当做在这个矩阵中转圈
DAY35:贪心算法part4、860\406\452
Leetcode: 860 柠檬水找零 有如下三种情况: 情况一:账单是5,直接收下。 情况二:账单是10,消耗一个5,增加一个10 情况三:账单是20,优先消耗一个10和一个5,如果不够,再消耗三个5 唯一不确定的其实在情况三。 账单是20的情况,为什么要优先消耗一个10和一个5呢? 因为美元10只能给账单20找零,而美元5可以给账单10和账单20找零,美元5更万能! 所以局部最
产品能力|云原生能力知识体系构建-Docker学习笔记Part4
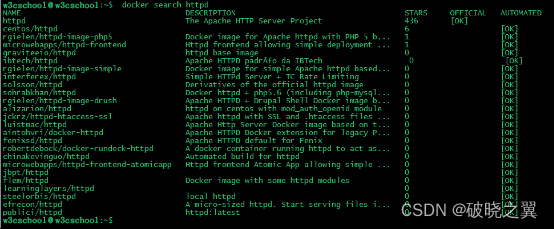
系列文章目录 第一节:Docker的介绍 第二节:Docker的安装 第三节:Docker的常用命令 第四节:Docker镜像 第五节:Docker 容器连接 其他后续完善 文章目录 系列文章目录前言一、镜像是什么?二、使用镜像2.1 获取一个新的镜像2.2 读入数据2.3 拖取镜像2.4 构建镜像2.5 设置镜像标签 三、 总结及扩展3.1busybox3.2 openjdk
即时通讯技术文集(第31期):IM开发综合技术合集(Part4) [共13篇]
为了更好地分类阅读 52im.net 总计1000多篇精编文章,我将在每周三推送新的一期技术文集,本次是第31 期。 [- 1 -] IM消息ID技术专题(一):微信的海量IM聊天消息序列号生成实践(算法原理篇) [链接] http://www.52im.net/thread-1998-1-1.html [摘要] 如何优雅地解决“消息序列号只要保证顺序性而不需要兼顾唯一性”的问题呢?
![[足式机器人]Part4 南科大高等机器人控制课 CH12 Robotic Motion Control](https://img-blog.csdnimg.cn/direct/8ffe8185e656438199a55465b404d4de.png#pic_center)
[足式机器人]Part4 南科大高等机器人控制课 CH12 Robotic Motion Control
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 课程链接 : https://www.wzhanglab.site/teaching/mee-5114-advanced-control-for-robotics/ 南科大高等机器人控制课 Ch12 Robotic Motion Control 1. Basic
![[足式机器人]Part4 南科大高等机器人控制课 CH10 Bascis of Stability Analysis](https://img-blog.csdnimg.cn/direct/4d9db554c7ce4010b525499f4ff67684.png#pic_center)
[足式机器人]Part4 南科大高等机器人控制课 CH10 Bascis of Stability Analysis
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch10 Bascis of Stability Analysis 1. Background1.1 What is Stability Analysis1.2 General ODE Models for Dynamical Syste
《PyTorch》Part4 PyTorch之小试牛刀
《PyTorch》Part4 PyTorch之小试牛刀 1.基于numpy求导来实现反向传播2.利用pytorch的非tensor相关函数求导来实现反向传播3.利用pytorch的非tensor相关函数求导来实现反向传播4.利用pytorch的非tensor相关函数求导来实现反向传播5.基于TensorFlow静态图实现自动求导和反向传播6.基于PyTorch的nn实现自动求导与反向传播7.
![[足式机器人]Part4 南科大高等机器人控制课 Ch08 Rigid Body Dynamics](https://img-blog.csdnimg.cn/direct/1677268e1f9f4a919827801b77b5c093.png)
[足式机器人]Part4 南科大高等机器人控制课 Ch08 Rigid Body Dynamics
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch08 Rigid Body Dynamics 1. Spatial Vecocity1.1 Spatial vs. Conventional Accel1.2 Plueker Coordinate System and Basis V
[足式机器人]Part4 南科大高等机器人控制课 Ch08 Rigid Body Dynamics
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch08 Rigid Body Dynamics 1. Spatial Vecocity1.1 Spatial vs. Conventional Accel1.2 Plueker Coordinate System and Basis V
![[足式机器人]Part4 南科大高等机器人控制课 Ch05 Instantaneous Velocity of Moving Frames](https://img-blog.csdnimg.cn/direct/e51d3ce1ff354bd980f96042e7092e47.png#pic_center)
[足式机器人]Part4 南科大高等机器人控制课 Ch05 Instantaneous Velocity of Moving Frames
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch05 Instantaneous Velocity of Moving Frames 1.Instantanenous Velocity of Rotating Frames2.Instantanenous Velocity of M