msgs专题

【ros2】geometry_msgs::msg::TransformStamped 数据类型详解
geometry_msgs::msg::TransformStamped 数据类型详解 1. 数据类型定义 geometry_msgs::msg::TransformStamped 是 ROS 2 中的一个消息类型,用于表示一个时间戳和坐标变换信息。 2. 结构 geometry_msgs::msg::TransformStamped 包含以下字段: struct TransformSt

ROS std_msgs消息包
ROS std_msgs消息包 基本概述 std_msgs 是 ROS(Robot Operating System)的一个核心消息包,包含了一系列基本的消息类型,这些类型用于节点之间的标准通信。std_msgs 中的消息类型设计得非常简单,以便用作更复杂消息的构建块或用于简单的数据传输。以下是一些 std_msgs 中定义的消息类型和它们的用途: 基本数据类型 Bool: 表示布尔值,即
发布sensor_msgs::PointCloud2点云数据
发布sensor_msgs::PointCloud2点云数据 方法一: //设置消息头文件和初始化节点#include <ros/ros.h>#include <sensor_msgs/PointCloud2.h>#include <sensor_msgs/point_cloud2_iterator.h>#include <geometry_msgs/Point.h>//

ROS Error: Could NOT find move_base_msgs
Ubuntu18.04 + ROS melodic, catkin编译mbot报错, -- +++ processing catkin package: 'mbot_navigation' -- ==> add_subdirectory(mbot_navigation) -- Could NOT find move_base_msgs (missing: move_base_msgs_DIR)
ros2 订阅 sensor_msgs/msg/PointCloud2
1.消息结构 daichang@daichang-ASUS:~/Desktop/ros2_ws$ ros2 interface show sensor_msgs/msg/PointCloud2# This message holds a collection of N-dimensional points, which may# contain additional information
visualization_msgs::Marker 的pose设置,map坐标系的3d box显示问题
3D框显示 3D框显示可以使用visualization_msgs::Marker::LINE_LIST或者LINE_STRIP,前者使用方法需要指明线的两个端点,后者自动连接相邻两个点。 姿态问题 网上看了一些,没有涉及到朝向设置,Pose.orientation默认构造为4个0 至少需要设置实部Pose.orientation.w = 1.f;对于3Dbox是有姿态的,我直接拿世界坐标系

ros sensor_msgs::laserscan 数据格式及velodyne_laserscan.cpp文件解析
laserscan数据格式如下(摘自wiki): 每个成员根据注释容易看出表示什么意思,强调一个容易理解错误的地方,ranges[]数组表示雷达旋转时,记录从angle_min到angle_max 角度范围内的距离数据,数组的大小并不是固定的360个,与激光雷达转速、方向角分辨有关,即以多少角度为间隔采集数据,也就是消息里面的angle_increment,(angle_max-angle_min
sensor_msgs 用法汇总和代码实战
文章目录 1. 使用 `sensor_msgs/Image` 发布摄像头数据导入必要模块创建发布者节点 2. 使用 `sensor_msgs/LaserScan` 发布激光雷达数据导入必要模块创建发布者节点 3. 使用 `sensor_msgs/Imu` 发布IMU数据导入必要模块创建发布者节点 运行节点 sensor_msgs 是 ROS 中用于处理各种传感器数据的标准消息类
error:move_base_msgs
CMake Warning at /opt/ros/kinetic/share/catkin/cmake/catkinConfig.cmake:76 (find_package): Could not find a package configuration file provided by “move_base_msgs” with any of the following names: mo
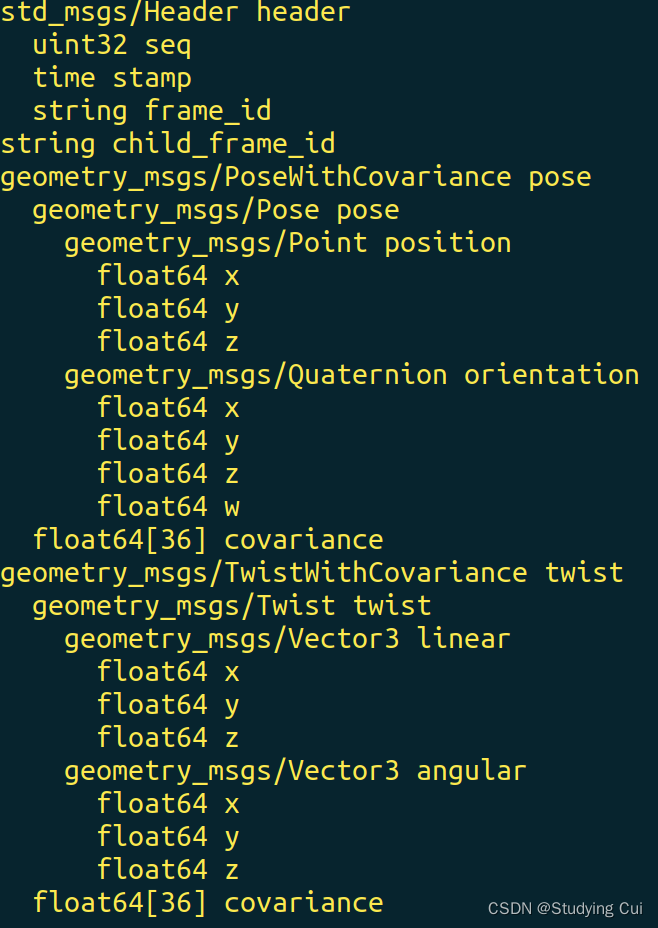
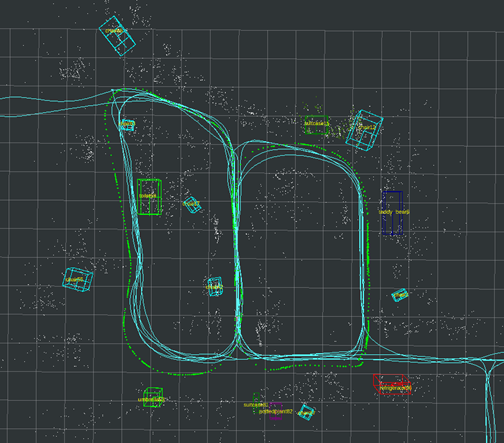
ROS里程计消息nav_msgs/Odometry的可视化方法
ROS中里程计的消息类型为nav_msgs/Odometry,该消息类型具有以下结构: 可以看到,里程计消息中的pose包含了位置pose.position和姿态pose.orientation 在ROS中,有一种常用消息类型为nav_msgs/Path,可视化的方法为: ①在一个节点中订阅发布的里程计话题消息nav_msgs/Odometry ②创建geometry_msgs:

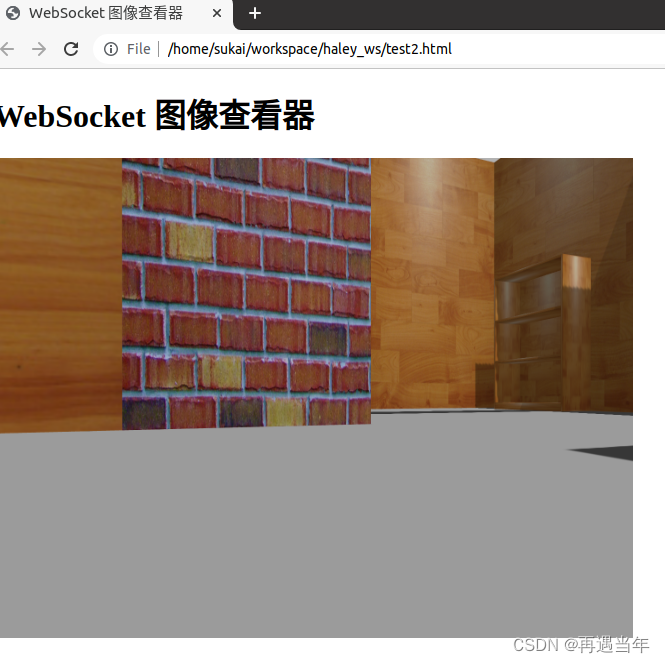
通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示(二)
通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示(二) mp4媒体流数据 #include <ros/ros.h>#include <signal.h>#include <sensor_msgs/Image.h>#include <message_filters/subscriber.h>#include <message_filter
通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示(二)
通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示(二) mp4媒体流数据 #include <ros/ros.h>#include <signal.h>#include <sensor_msgs/Image.h>#include <message_filters/subscriber.h>#include <message_filter

通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示(三)
通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示(三) 不使用base64编码方式传递 #include <ros/ros.h>#include <signal.h>#include <sensor_msgs/Image.h>#include <message_filters/subscriber.h>#include <messag
通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示
通过ros系统中websocket中发送sensor_msgs::Image数据给web端显示 #include <ros/ros.h>#include <signal.h>#include <sensor_msgs/Image.h>#include <message_filters/subscriber.h>#include <message_filters/synchronize
ROS笔记之visualization_msgs-Marker学习
ROS笔记之visualization_msgs-Marker学习 code review! 文章目录 ROS笔记之visualization_msgs-Marker学习一.line_strip例程二.line_list例程一二.line_list例程二二.TEXT_VIEW_FACING例程三.附CMakeLists.txt和package.xml五.关于odom、base_link
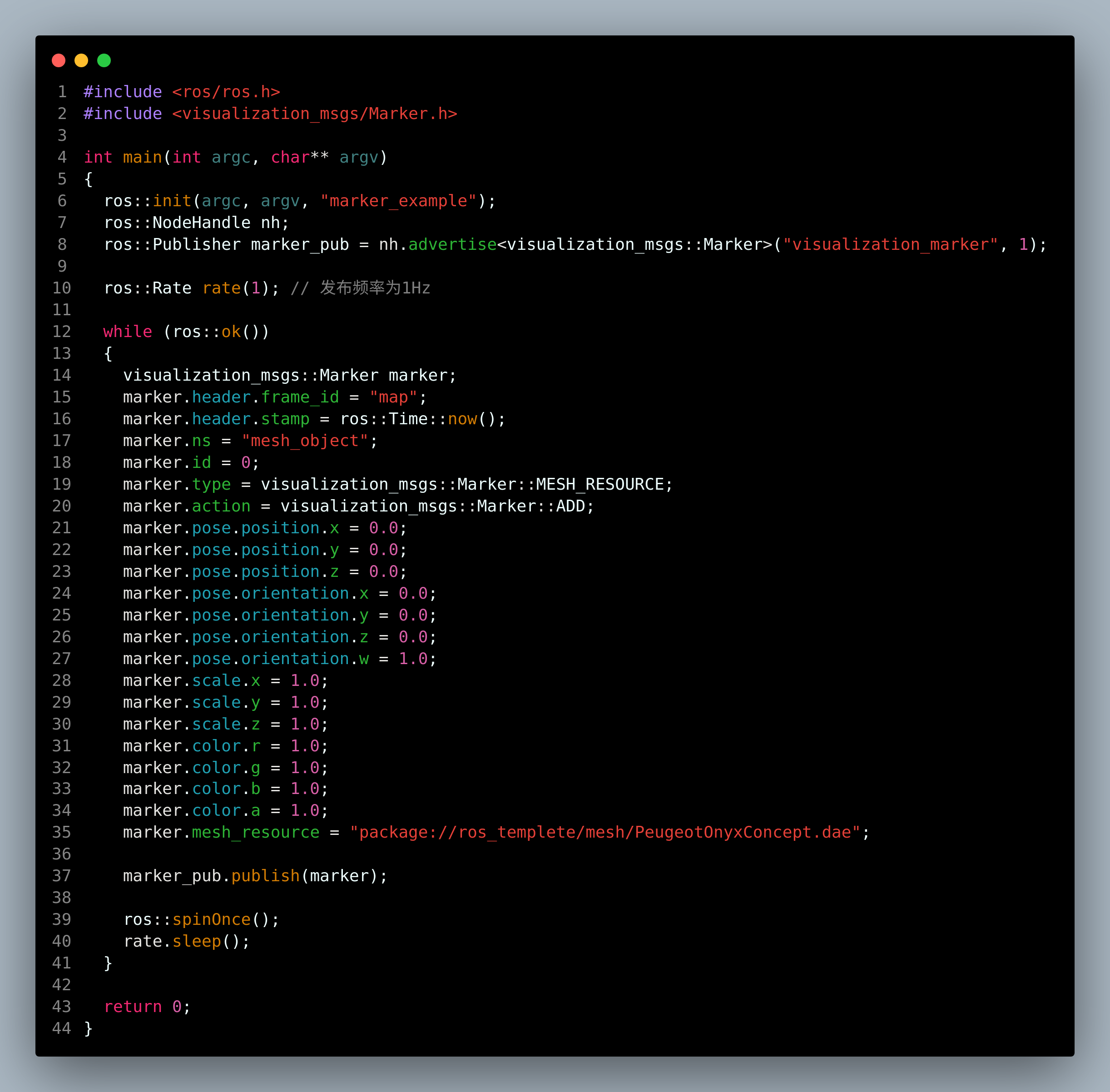
ROS笔记之visualization_msgs-Marker的mesh_resource导入外部模型学习
ROS笔记之visualization_msgs-Marker的mesh_resource学习 code review! 文章目录 ROS笔记之visualization_msgs-Marker的mesh_resource学习1.运行2.文件结构3.main.cc 参考博文 1.kitti之ros可视化_学习笔记–第4课:车子模型的添加 2.rviz进行kitti数据集可视化时