本文主要是介绍ROS里程计消息nav_msgs/Odometry的可视化方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ROS中里程计的消息类型为nav_msgs/Odometry,该消息类型具有以下结构:
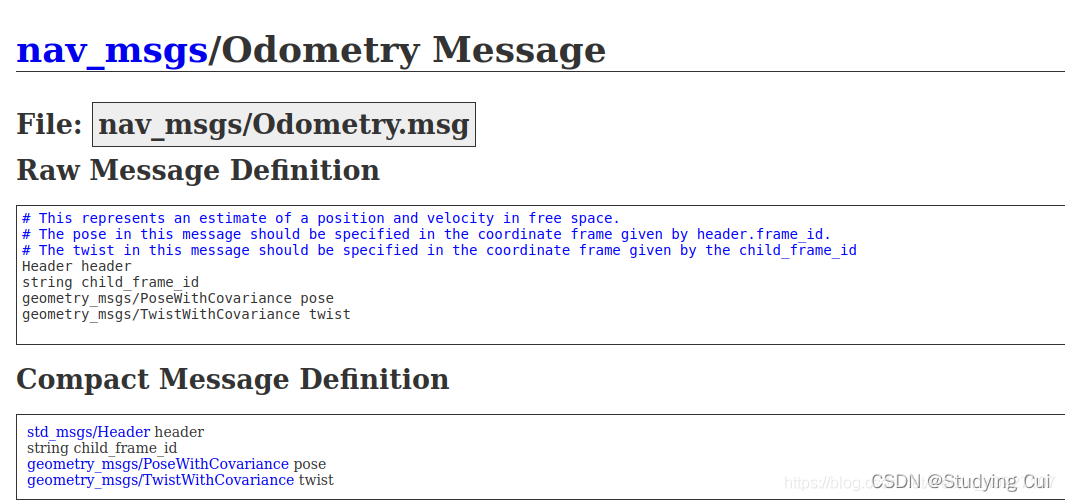
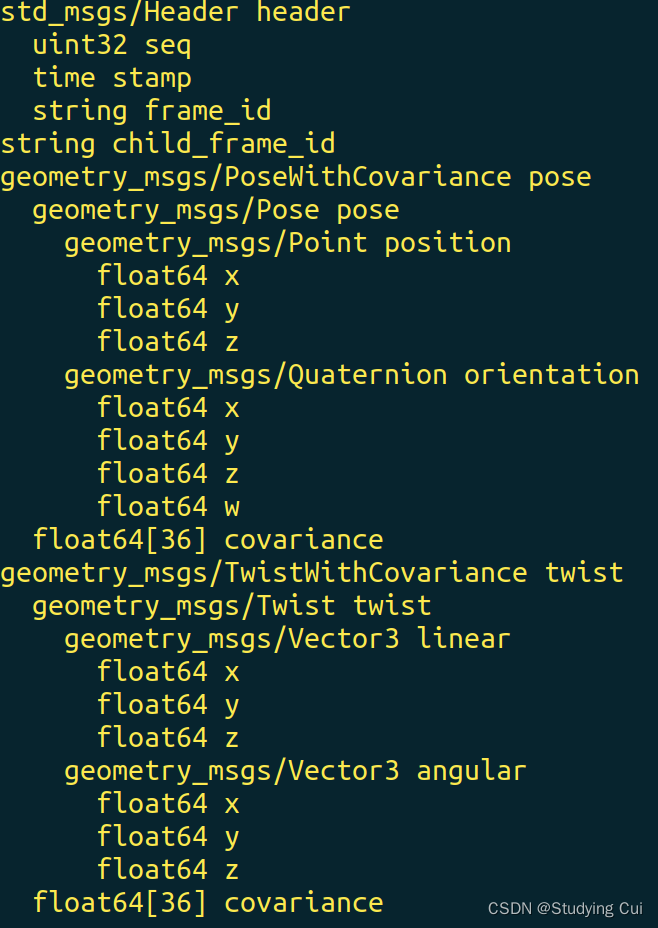
可以看到,里程计消息中的pose包含了位置pose.position和姿态pose.orientation
在ROS中,有一种常用消息类型为nav_msgs/Path,可视化的方法为:
①在一个节点中订阅发布的里程计话题消息nav_msgs/Odometry
②创建geometry_msgs::PoseStamped对象接收里程计的位姿
③创建nav_msgs/Path对象作为容器,将赋值后的对象push_back进nav_msgs/Path中并发布
然后即可在rviz中订阅包含nav_msgs/Path的话题并可视化轨迹
1.新建ROS工作空间
mkdir -p path_ws/src
cd path_ws
catkin_make
cd src
catkin_create_pkg path_3d roscpp rospy std_msgs nav_msgs geometry_msgs2.在path_3d/src中编写消息收发节点文件path_3d.cpp
#include <ros/ros.h>
#include <nav_msgs/Path.h>
#include <std_msgs/String.h>
#include <nav_msgs/Odometry.h>
#include <geometry_msgs/PoseStamped.h>
#include <tf/transform_broadcaster.h>
#include <tf/tf.h>nav_msgs::Path path;
ros::Publisher path_pub;void pathCallback(const nav_msgs::Odometry::ConstPtr& odom_3d)
{geometry_msgs::PoseStamped position_3d;position_3d.pose.position.x = odom_3d->pose.pose.position.x; position_3d.pose.position.y = odom_3d->pose.pose.position.y; position_3d.pose.position.z = odom_3d->pose.pose.position.z;position_3d.pose.orientation = odom_3d->pose.pose.orientation;position_3d.header.stamp = odom_3d->header.stamp;position_3d.header.frame_id = "map";path.poses.push_back(position_3d);path.header.stamp = position_3d.header.stamp;path.header.frame_id = "map";path_pub.publish(path);std::cout << odom_3d -> header.stamp << ' ' << odom_3d->pose.pose.position.x << ' ' << odom_3d->pose.pose.position.y << ' ' << odom_3d->pose.pose.position.z << std::endl;
}int main (int argc, char **argv)
{ros::init (argc, argv, "showpath");ros::NodeHandle ph;path_pub = ph.advertise<nav_msgs::Path>("odom3d_path", 10, true);ros::Subscriber odomSub = ph.subscribe<nav_msgs::Odometry>("/odometry_3d", 10, pathCallback); //订阅里程计话题信息,其中"/odometry_3d"是自己发布的里程计话题名,别忘了修改ros::Rate loop_rate(1000);while(ros::ok()){ros::spinOnce();loop_rate.sleep();}return 0;
}
3.path_3d文件夹目录中的CMakeLists.txt如下:
cmake_minimum_required(VERSION 2.8.3)
project(path_3d)## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)find_package(catkin REQUIRED COMPONENTSgeometry_msgsroscpprospystd_msgs
message_generation
)## Generate added messages and services with any dependencies listed heregenerate_messages(DEPENDENCIESgeometry_msgs std_msgs)catkin_package(INCLUDE_DIRS includeLIBRARIES path_3dCATKIN_DEPENDS geometry_msgs roscpp rospy std_msgsDEPENDS system_lib
)include_directories(include${catkin_INCLUDE_DIRS}
)add_executable(path_3d src/path_3d.cpp) #${PROJECT_NAME}_node
target_link_libraries(path_3d ${catkin_LIBRARIES}) # ${PROJECT_NAME}_node
add_dependencies(path_3d beginner_tutorials_generate_messages_cpp) #path_3d_node4.在工作空间中编译功能包
// 打开命令行
// 进入工作空间最上层目录
cd path_ws
// 执行一下 source 命令
source devel/setup.bash
// 编译工作空间下的所有功能包
catkin_make
// 单独编译工作空间下的 path_3d 功能包
catkin_make -DCATKIN_WHITELIST_PACKAGES="path_3d"5.启动节点、在rviz中订阅odom3d_path话题,即可查看可视化数据
// 终端中启动roscore
roscore
// 另一个终端启动节点
rosrun path_3d path_3d
// 在数据包路径下,播放带有 nav_msgs/Odometry 消息的数据包
rosbag play 你自己需要可视化的数据包.bag
// 第三个终端,启动rviz,frame选择map,订阅发布的odom3d_path话题
rviz这篇关于ROS里程计消息nav_msgs/Odometry的可视化方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






