odometry专题

轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合
轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合通常采用某种形式的滤波技术,最常见的是卡尔曼滤波器(Kalman Filter)或其变体,如扩展卡尔曼滤波器(Extended Kalman Filter, EKF)、无迹卡尔曼滤波器(Unscented Kalman Filter, UKF)或粒子滤波器(Particle Filter)。这些滤波器能够综合两种传感器的优势,

机器人里程计(Odometry)
机器人里程计(Odometry)是机器人定位和导航中的一个关键概念,它涉及到利用传感器数据来估计机器人在环境中的位置和姿态。里程计的基本原理是根据机器人自身动作的反馈来计算其相对于初始位置的位移。这通常包括机器人从一个已知位置开始,然后使用各种类型的传感器来测量其自身的运动。 以下是一些常见的里程计类型: 1. **轮式里程计(Wheel Odometry)**: - 使用安装在机器人轮

人工智能 | SLAM与Visual Odometry技术综述(浙江大学智能系统和控制研究所)
github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 下载链接:https://download.csdn.net/download/u011344545/11195245 视觉里程计 | 视觉里程计VO及惯性系统 视觉里程计 | 视觉里程计综述 1、视觉里程计
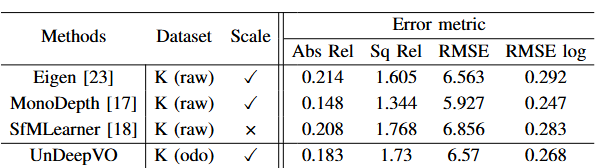
UnDeepVO: Monocular Visual Odometry through Unsupervised Deep Learning 论文阅读
论文链接 UnDeepVO: Monocular Visual Odometry through Unsupervised Deep Learning 0. Abstract 提出了一种名为 UnDeepVO 的新型单目视觉里程计(VO)系统。 UnDeepVO 能够使用深度神经网络估计单目相机的 6-DoF 位姿及其视图深度两个显着特征:一是无监督深度学习方案,二是绝对规模恢复
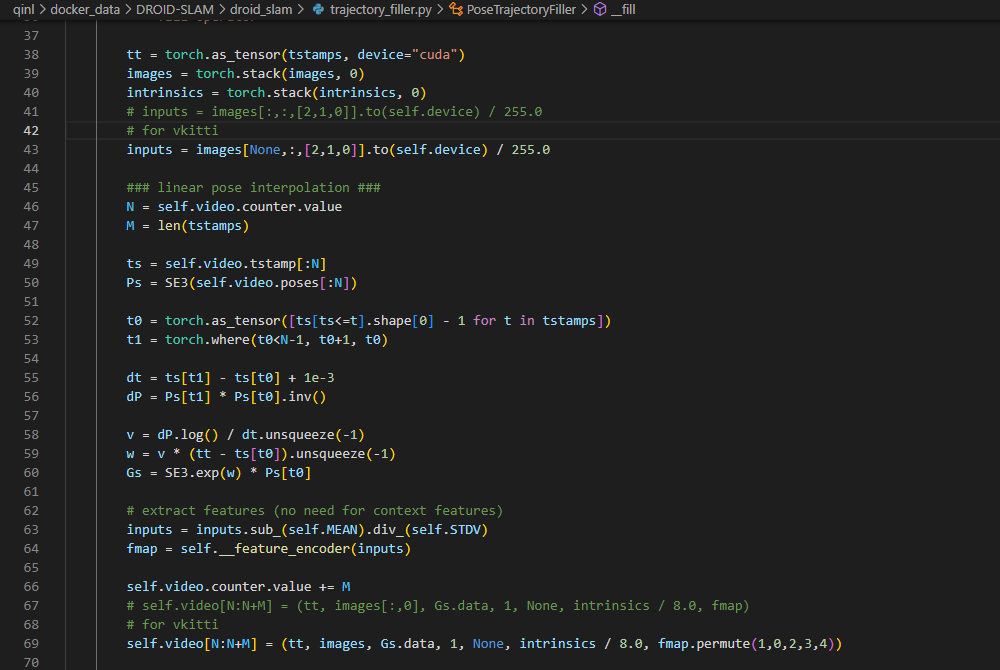
PVO: Panoptic Visual Odometry代码复现(如何在脚本设置GPU选择,软链接映射数据集)
配置环境 代码:https://github.com/zju3dv/pvo 1.拉取代码 git clone https://github.com/zju3dv/pvo 这个工程中的VO_Module中的thirdparty部分需要用DROID-SLAM的替换之后才行 具体参考我另一篇博客 https://blog.csdn.net/qin_liang/article/details/1

《论文阅读》Deep Online Correction for Monocular Visual Odometry
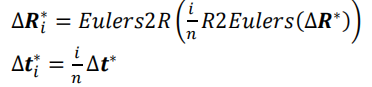
留个笔记自用 Deep Online Correction for Monocular Visual Odometry 做什么 Monocular Visual Odometry单目视觉里程计 相机在运动过程中连续两帧之间会存在overlap,即会同时观测到三维世界中的某些场景以及特征点。而这些场景特征点会投射到2D图片上,通过图片的对齐或者特征的匹配,可以找到前后图片上特点或patch的
《论文阅读》Poisson Surface Reconstruction for LiDAR Odometry and Mapping
留个笔记自用 Poisson Surface Reconstruction for LiDAR Odometry and Mapping 做什么 Lidar Odometry激光雷达里程计,里程计作为移动机器人相对定位的有效传感器,为机器人提供了实时的位姿信息。移动机器人里程计模型决定于移动机器人结构和运动方式,即移动机器人运动学模型。 简单来说,里程计是一种利用从移动传感器获得的数据来估计
(Lidar SLAM 论文)LOAM: Lidar Odometry and Mapping in Real-time
摘要 我们提出了一种利用2轴激光雷达在6自由度范围内的距离测量进行里程测量和地图绘制的实时方法。这个问题很难解决,因为距离测量是在不同的时间接收的,运动估计中的错误可能会导致结果点云的错误配准。迄今为止,可以通过离线批处理方法构建连贯的3D地图,通常使用回环来校正随时间的漂移。我们的方法实现了低漂移和低计算复杂度,无需高精度测距或惯性测量。获得这一性能水平的关键思想是通过两种算法来划分同时定位和
LOAM: Lidar Odometry and Mapping in Real-time 论文阅读
论文链接 LOAM: Lidar Odometry and Mapping in Real-time 0. Abstract 提出了一种使用二维激光雷达在6自由度运动中的距离测量进行即时测距和建图的方法 距离测量是在不同的时间接收到的,并且运动估计中的误差可能导致生成的点云的错误配准 本文的方法在不需要高精度测距或惯性测量的情况下同时实现了低漂移和低计算复杂性关键思想是将同时定
ROS里程计消息nav_msgs/Odometry的可视化方法
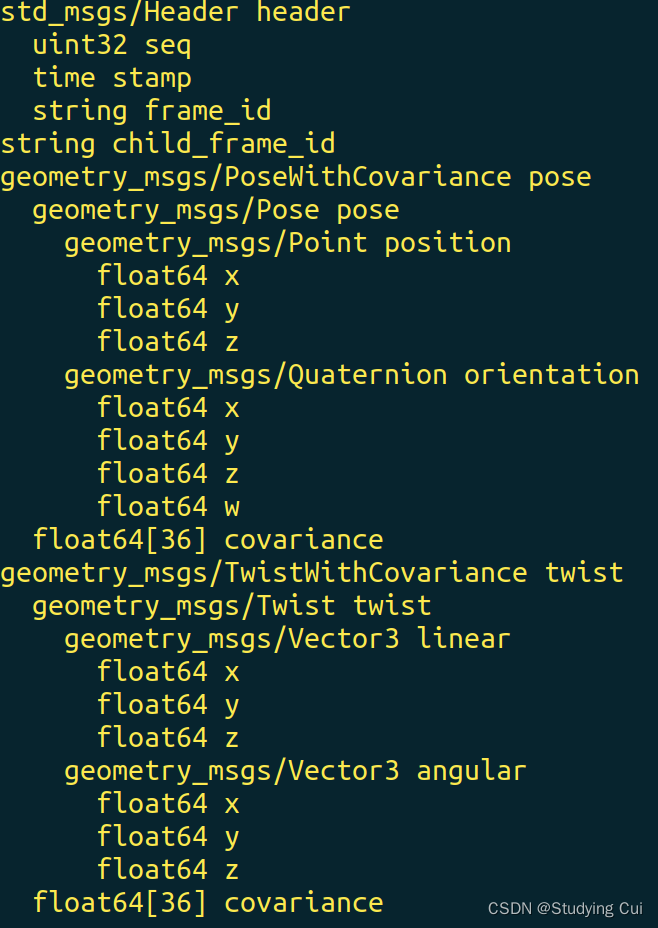
ROS中里程计的消息类型为nav_msgs/Odometry,该消息类型具有以下结构: 可以看到,里程计消息中的pose包含了位置pose.position和姿态pose.orientation 在ROS中,有一种常用消息类型为nav_msgs/Path,可视化的方法为: ①在一个节点中订阅发布的里程计话题消息nav_msgs/Odometry ②创建geometry_msgs:

TUM VIO数据集介绍与尝试 The TUM VI Benchmark for Evaluating Visual-Inertial Odometry论文翻译
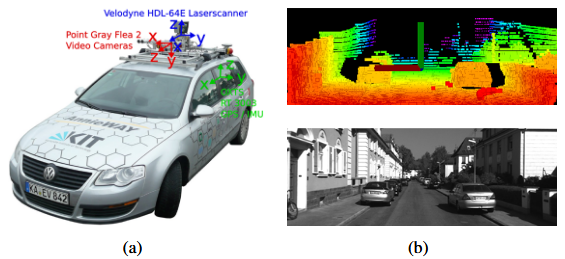
前言 做SLAM或是CV方向的应该大都接触过TUM提供的各种数据集,如RGBD数据集、单目数据集等。最近TUM发布了关于VIO即视觉惯性状态估计的对应数据集,成为了继飞行数据集EuRoc、MAV、车辆数据集Kitti等之后的又一个常用大型数据集。 本博客将就其数据集的论文《The TUM VI Benchmark for Evaluating Visual-Inertial Odometry》对
The Surprising Effectiveness of Visual Odometry Techniques for Embodied PointGoal Navigation 论文阅读
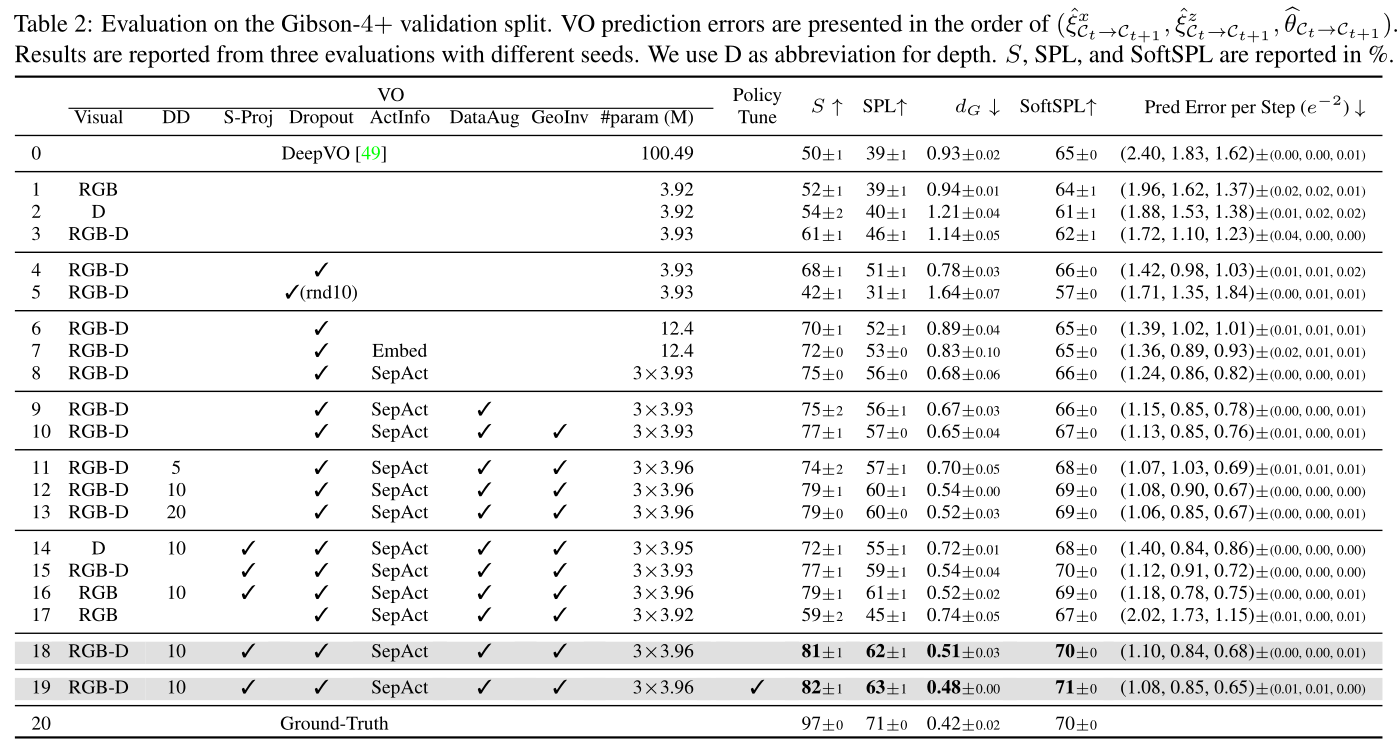
论文信息 标题:The Surprising Effectiveness of Visual Odometry Techniques for Embodied PointGoal Navigation 作者:Xiaoming Zhao, Harsh Agrawal 来源:ICCV 时间:2021 项目地址:https://xiaoming-zhao.github.io/projects/poin

Direct LiDAR-Inertial Odometry
DLIO Runing 运行效果: <video id=“video” controls=""src=“data/dlio_ss.mp4” height=“500” preload=“none”> 论文 摘要 难点:快速运动 or 穿越不规则地形时降低精度,通常过于简单的方法而过高的计算量。本方案提出:Direct LiDAR-Inertial Odometry:一种轻量级激光雷达惯性
《论文阅读》CAE-LO: LiDAR Odometry Leveraging Fully Unsupervised Convolutional Auto-Encoder Based Interes
留个笔记自用 CAE-LO: LiDAR Odometry Leveraging Fully Unsupervised Convolutional Auto-Encoder Based Interest Point Detection and Feature Description 做什么 Lidar Odometry激光雷达里程计,里程计作为移动机器人相对定位的有效传感器,为机器人提供了实