nav专题

web前端设计nav:深入探索导航栏设计的艺术与技术
web前端设计nav:深入探索导航栏设计的艺术与技术 在web前端设计中,导航栏(nav)扮演着至关重要的角色,它不仅是用户浏览网站的指引,更是网站整体设计的点睛之笔。本文将从四个方面、五个方面、六个方面和七个方面,深入探讨web前端设计中导航栏的艺术与技术,带您领略其魅力所在。 四个方面:导航栏的基本要素与功能 首先,我们来谈谈导航栏的基本要素。一个完整的导航栏通常包括主页、关于我们、产品

纵向导航栏使用navbar-nav-scroll溢出截断问题
项目场景: 组件:Bootstrap-4.6.2、JQuery 3.7.1 测试浏览器:Firefox126.0.1、Microsoft Edge125.0.2535.67 IDE:eclipes2024-03.R 在编写CRM的工作台主页面时,由于该页面使用的是较旧的技术,所以打算使用Bootstrap重写响应式页面,主要使用了Bootstrap的格栅布局系统。在编写左侧纵向导航栏时,发现添
3、css3 手写nav导航条(互相学习)
效果例图: 1、首先呈现的是html代码: <!DOCTYPE html><html lang="zh"><head><meta charset="UTF-8"><meta name="viewport" content="width=device-width, initial-scale=1.0"><link rel="stylesheet" href="./3.css"><titl
NavCom SF3050出现Nav Not Valid问题的原因终于找到了
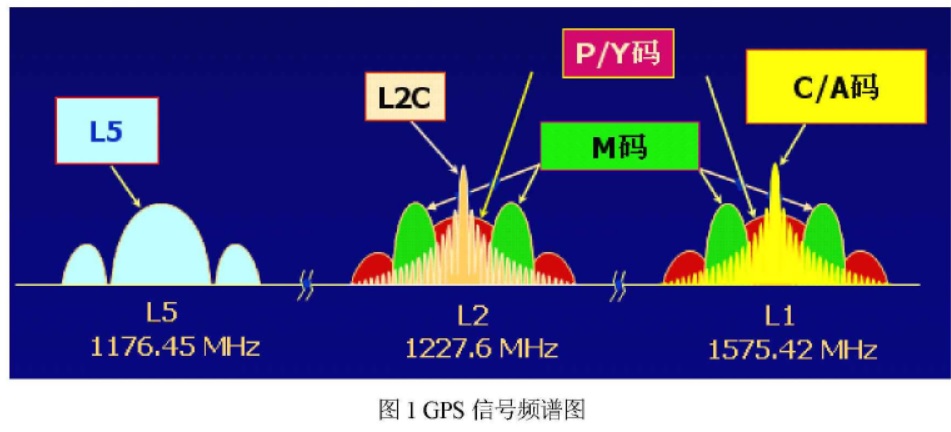
2021年11月外业中,星站差分GPS-NavComSF3050出现Nav Not Valid的问题,一旦出现这个现象,所有设备的位置信息马上丢失,有时长达好几分钟。令人非常奇怪的是:NavCom 的状态灯都是正常的,卫星数量稳定,差分信号稳定,当时博主怀疑很有可能是接收机的主机板子即信号解算出现了问题。 外业回来以后,博主将NavCom的主机寄回厂家,厂家进行了测试,24小时都是稳定的

头歌使用GDB调试程序nav第1关:基本实验工具 GDB 的使用
编程要求 根据提示,在右侧编辑器补充代码,完成对 main.c 程序的编译,并在代码第 4 行和第 6 行设置断点。在GDB中运行程序,每次遇到断点时,对变量 a 进行打印输出。 (请不要对 main.c 进行修改) main.c #include<stdio.h>int main(){int a=10;int b=20;a=a+b;return 0;} cd /data/workspa

JS实现Bootstrap中的Nav自动轮播切换
1.直接上JS <script>//Add by liangxin at 2020-10-27 22:34:53$(function () {var i = 0;setInterval(function(){if(i==5){i=0;} //Nav Count$('#myTab li:eq('+i+') a').tab('show');i++;},5000);});</script> 2.
iOS: using xcode 4.3 to create nav controller + tab view + table view without storyboard
http://www.youtube.com/watch?v=UMpNbCs4mr4


寻路网格Nav Mesh的生成原理
文章目录 1 简介2 背景和相关工作2.1 Recast2.1.1 输入准备2.1.2 光栅化2.1.3 过滤2.1.4 区域的产生2.1.5 轮廓 - 和 多边形网格的产生 这篇文章将会翻译一篇来自布莱金理工学院的论文 Towards Real-Time NavMesh Generation Using GPU Accelerated Scene Voxelization的前

小程序固定头部实现:van-nav-bar插件
用的是Vant的NavBar插件: https://youzan.github.io/vant-weapp/#/nav-bar#wai-bu-yang-shi-lei 效果图 页面使用,放开注释的地方就可以显示左边按钮 <van-nav-bar title="精益成本核算" fixed="true" placeholder="true" custom-class="nav" tit

详解Unity中的Nav Mesh新特性|导航寻路系统 (三)
前言 通过前面两篇的介绍与讲解我们已经对新版NavMesh有了一个基础的了解和使用,本篇我们继续讲解剩余的两个组件NavMeshModifier、NavMeshModifierVolume,这两个组件是主要是用于影响导航网格的生成的。所以内容不是很主要,但也非常重要。 本系列提要 Unity新版NavMesh专题博客共分成三篇来讲解: 【本篇为第三篇】 第一篇(点击直达):新版NavMes
django admin 自定义界面时丢失左侧导航 nav_sidebar
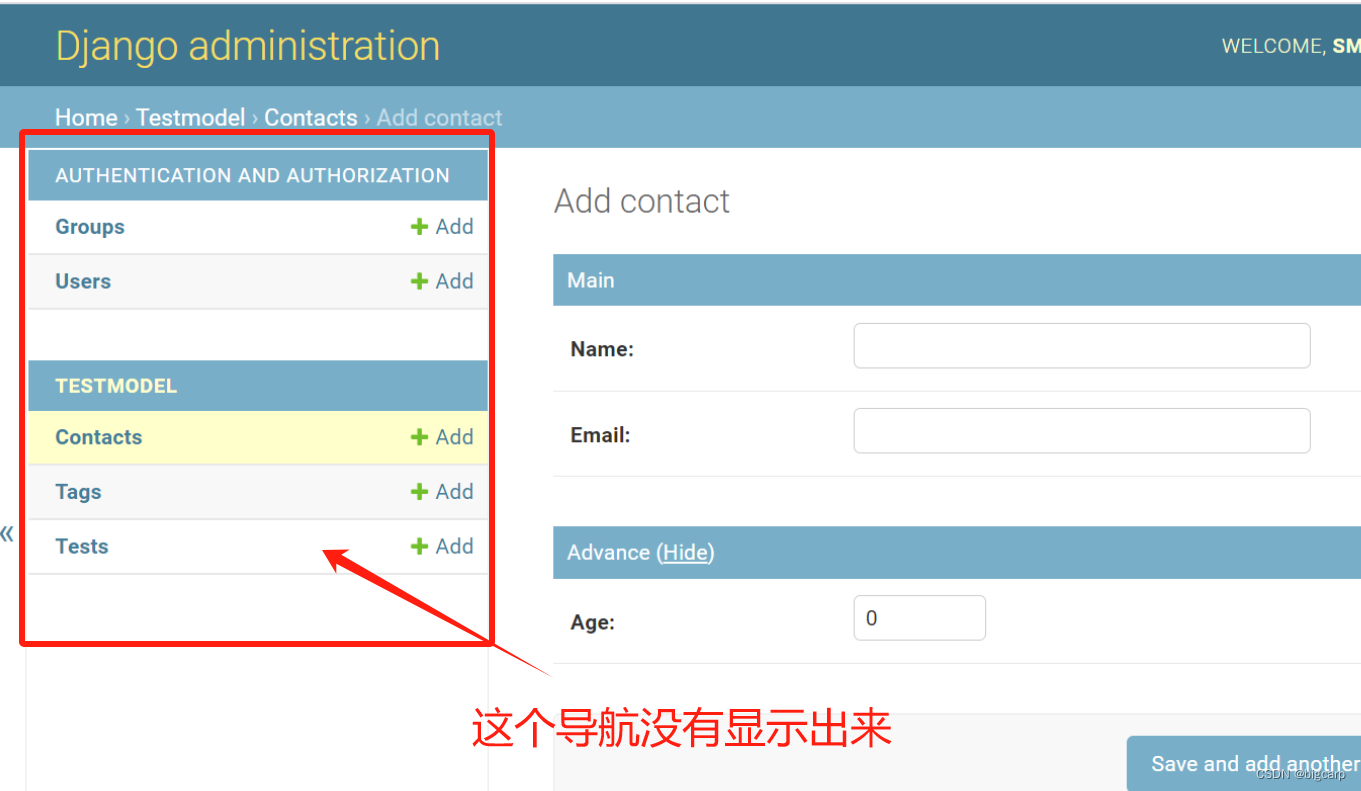
只显示了自定义模板的内容,左侧导航没有显示出来。 原因:context 漏掉了,要补上。 # 错误写法(左侧导航不显示)def changelist_view(self, request, extra_context=None):form = CsvImportForm()payload = {"form": form}return TemplateResponse(request
orbslam_semantic_nav_ros 编译出现的问题2
报错内容: home/ckq/catkin_ws_iit/src/semantic_slam_nav_ros/dense_surfel_mapping/src/surfel_map.cpp:767:46: required from here/opt/ros/noetic/include/ros/message_traits.h:

Nav Mesh Agent ai自动寻路组件 使用笔记
如上图:绿色的球DesBall为目标,粉红柱状Player为追踪物。深灰色的Obstacal为障碍物。底部浅灰色Floor。 目录Window-->Navigation打开面板如下: 选中Hierarchy下的两个Obstacal, 勾选上Navigation Static,并设置Navigation Layer为Not Walkable. 点击Bake
开源项目TARZAN-NAV | 基于springboot的现代化导航网站系统
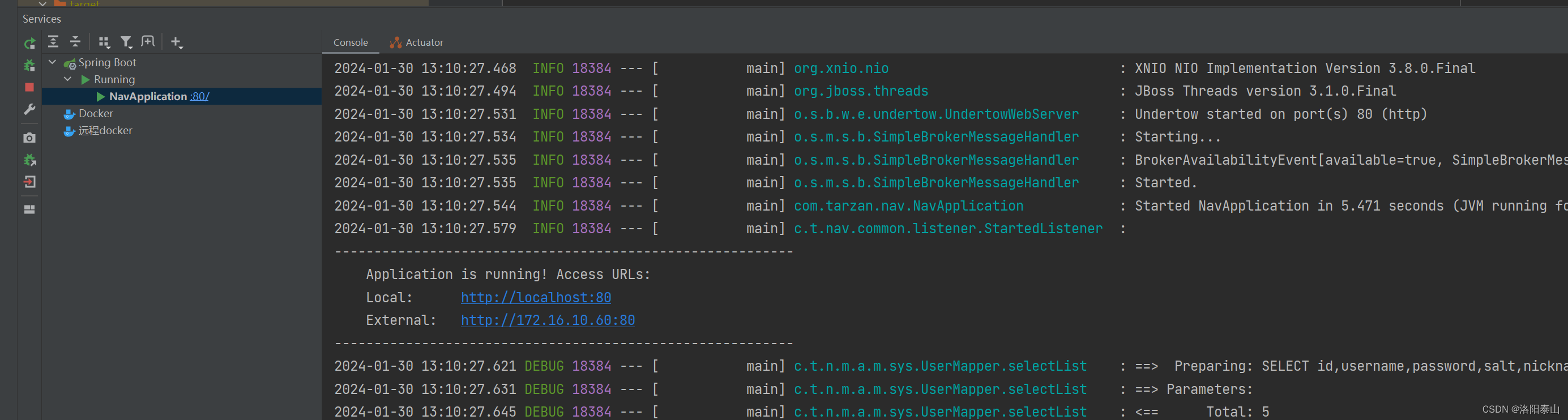
TARZAN-NAV 导航网站 一个基于 Spring Boot、MyBatis-Plus、h2database、ehcache、Docker、websocket等技术栈实现的导航网站系统,采用主流的互联网技术架构、全新的UI设计、支持一键源码部署,拥有完整的仪表板、导航管理,用户管理、评论管理、友情链接、公告管理、运维管理等,代码完全开源,没有任何二次封装,是一个非常适合二次开发/实战的现代化
SDKJ_NAV《docker部署》
SDKJ_NAV《docker部署》 1. 下载ubuntu/nginx镜像,并创建容器2.基础环境配置3. 配置nginx(前端站点)4. 配置python环境(后端环境)5. 配置mongodb5. 配置 redis 1. 下载ubuntu/nginx镜像,并创建容器 1.官网下载,这里选择的是 ubuntu/nginx:1.18-20.04_beta 版本 2. 通过
uniapp使用uni-ui组件库的uni-goods-nav组件,删除了示例中的option数组,还是会出现“店铺”、购物车的按钮和字样
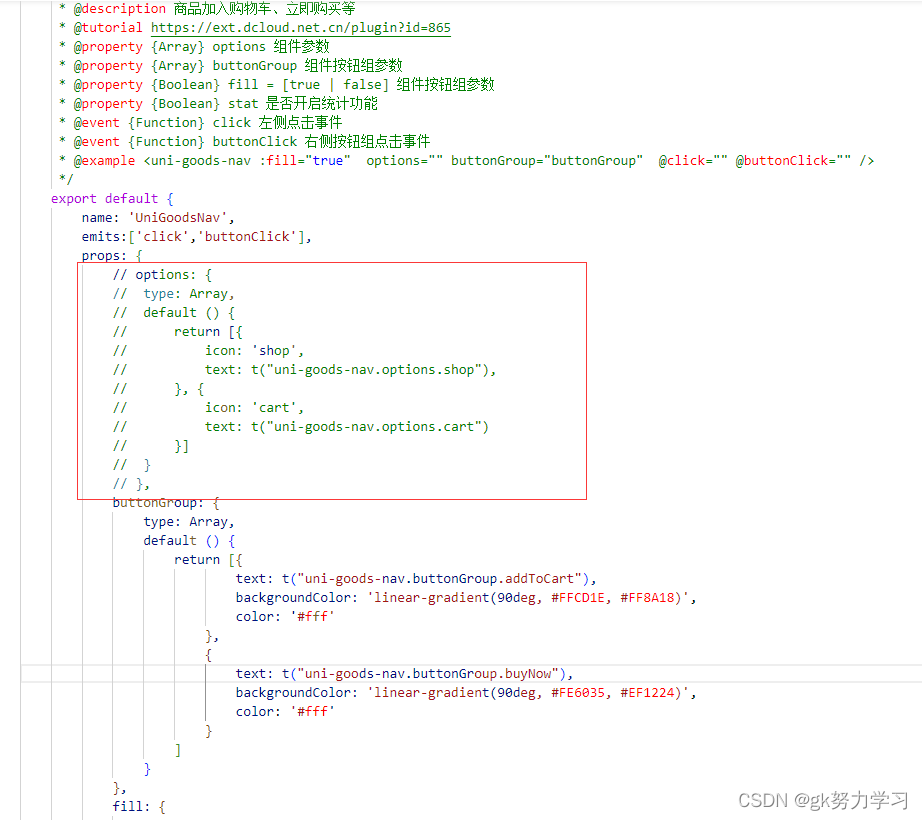
问题 uniapp使用uni-ui组件库的uni-goods-nav组件,删除了示例中的option数组,还是会出现“店铺”、购物车的按钮和字样 在vue文件中 展示页面 原因 在uni-goods-nav组件的源码中,内置了“店铺”和“购物车”的按钮和样式,还包括了加入购物车、购买这两个按钮 <script>import {initVueI18n} from '@dcloudio/u
uniapp使用uni-ui组件库的uni-goods-nav组件,删除了示例中的option数组,还是会出现“店铺”、购物车的按钮和字样
问题 uniapp使用uni-ui组件库的uni-goods-nav组件,删除了示例中的option数组,还是会出现“店铺”、购物车的按钮和字样 在vue文件中 展示页面 原因 在uni-goods-nav组件的源码中,内置了“店铺”和“购物车”的按钮和样式,还包括了加入购物车、购买这两个按钮 <script>import {initVueI18n} from '@dcloudio/u
ROS里程计消息nav_msgs/Odometry的可视化方法
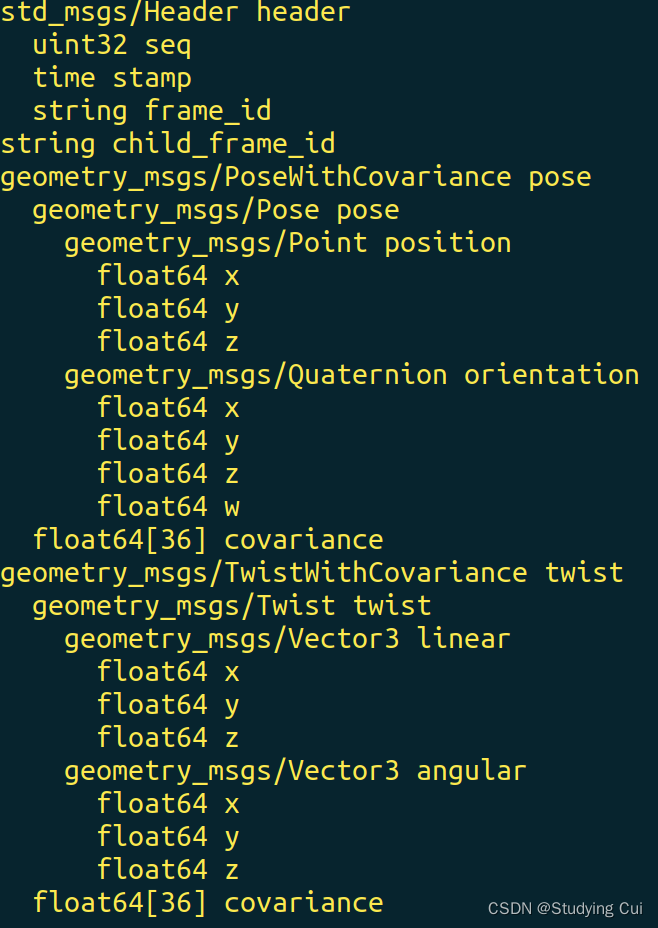
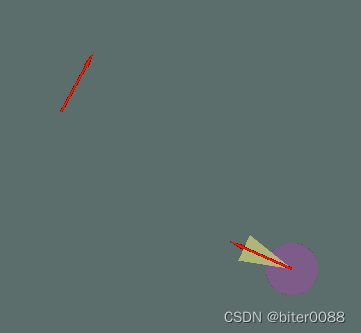
ROS中里程计的消息类型为nav_msgs/Odometry,该消息类型具有以下结构: 可以看到,里程计消息中的pose包含了位置pose.position和姿态pose.orientation 在ROS中,有一种常用消息类型为nav_msgs/Path,可视化的方法为: ①在一个节点中订阅发布的里程计话题消息nav_msgs/Odometry ②创建geometry_msgs:
品优购:nav导航、footer部分
目录 nav导航栏 footer部分 mod-copyright nav导航栏 nav盒子通栏有高度,有下边框 1号盒子左浮动,dropdown 2号盒子左侧浮动,navitems导航栏组 先看dropdown里,先表头,这里意思是description term, 然后是一系列表格内容,其中text-align,line-h

Html5新增语义结构元素:article section aside nav header hgroup footer time
一个使用如上元素的Html页例子: <!DOCTYPE html><html><head lang="en"><meta charset="UTF-8"><title>Html5新增语义结构元素:article section aside nav header hgroup footer time</title><style>:root{min-width: 1000px;}ul{mar

bootstrap3-标签页 nav, tabs and pills
basic tab based Navigation basic pills based Navigation <div class="container"><div class="row"><!-- 横向TAB导航 --><div class="col-lg-6"><ul class="nav nav-tabs"><li class="active"><a href="#">
ros(23):接收rviz中的2D Nav Goal、2D Pose Estimate消息
1 rviz 教程 1.1 2D Nav Goal 2D Nav Goal (Keyboard shortcut: g) This tool lets you set a goal sent on the "goal" ROS topic. Click on a location on the ground plane and drag to select the orientation:
寻路网格Nav Mesh的生成原理
文章目录 1 简介2 背景和相关工作2.1 Recast2.1.1 输入准备2.1.2 光栅化2.1.3 过滤2.1.4 区域的产生2.1.5 轮廓 - 和 多边形网格的产生 这篇文章将会翻译一篇来自布莱金理工学院的论文 Towards Real-Time NavMesh Generation Using GPU Accelerated Scene Voxelization的前