hand专题

Fine-Grained Egocentric Hand-Object(中文翻译)
精细化自我中心手-物体分割: 数据集、模型(model)与应用 灵芝张1, 盛昊周1, 西蒙·斯滕特 $ {}^{2} $, 和健博·石 $ {}^{1} $ 摘要。 自我中心视频提供了高保真度建模人类行为的细粒度信息。手和交互对象是理解观众行为和意图的一个关键方面。我们提供了一个标注数据集,包含11,243个自我中心图像,并具有在各种日常活动中与手和对象互动的逐像素分割标签。我们的数据集是

技术接口:日志程序(hand)
1.技术需求 接口或者BAPI传输数据日志保存。 2.技术实现 确认系统内有没有下列对象: R3TR PROG ZFMPARAVALDELETE R3TR PROG ZFMPARAVALREAD R3TR PROG ZFMPARAVALSAVE R3TR
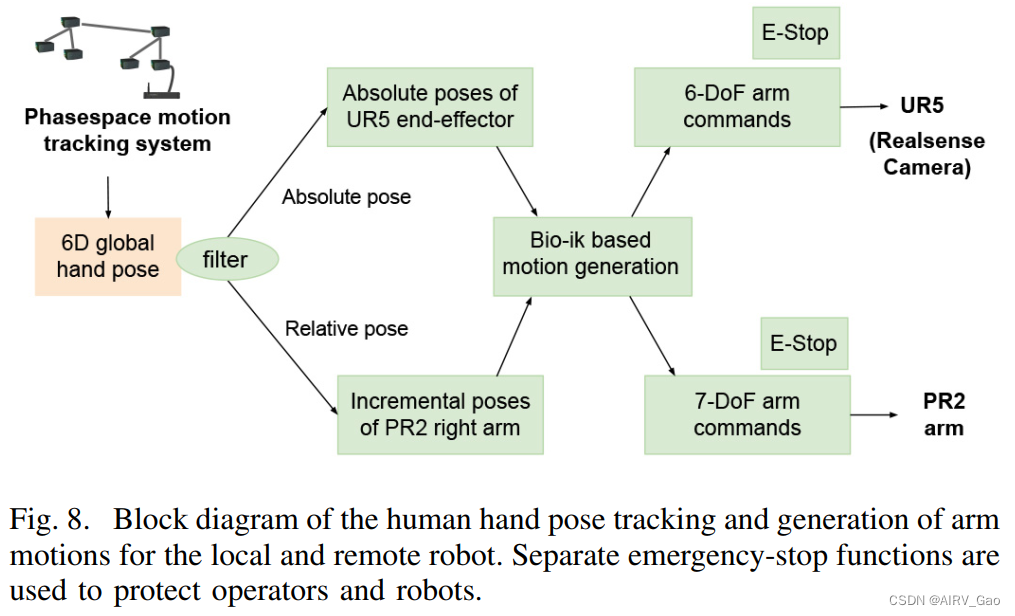
A Dexterous Hand-Arm Teleoperation System
A Dexterous Hand-Arm Teleoperation System Based on Hand Pose Estimation and Active Vision解读 摘要1. 简介2.相关工作2.1 机器人遥操作2.2 主动视觉(Active Vision) 3. 硬件设置4. 基于视觉的机器人手部姿态估计4.1 Transteleop4.2 Dataset 5. 主动视觉
【论文阅读】EgoPCA: A New Framework for Egocentric Hand-Object Interaction
论文主要贡献 提出一种新的框架:Ego-HOI recognition by Probing, Curation and Adaption (EgoPCA)。构建了全面的预训练集,平衡的测试集,以及一个包含了微调策略的baseline。 在Ego-HOI达到了SOTA,并且建立了有效的机制方法。 Code and data are available here. 已有工作 Ego-HOI

Card Hand Sorting Gym - 101550C(枚举+LIS)
题意: n个卡牌,每个卡牌有值和种类,你可以任意调换某张卡牌的顺序,要求使得每个种类的卡牌在一起,且为有序(递增或递减) 思路: 枚举属性的顺序以及是递增还是递减。 然后寻找与原串的LIS。LIS代表最大不需要改变的部分。 #include <cstdio>#include <cstring>#include <vector>#include <map>using namespace

阿里通义千问开源 320 亿参数模型;文字和音频自动翻译成手语Hand Talk拉近人与人的距离
✨ 1: Qwen1.5-32B Qwen1.5-32B是Qwen1.5系列中性能与效率兼顾的最新语言模型,内存占用低,运行速度快。 Qwen1.5-32B是Qwen1.5语言模型系列的最新成员,这个模型是基于先进的技术研发的,旨在提供一种既高效又经济的AI语言理解和生成工具。 Qwen1.5-32B是一款既高效又经济实惠的语言模型,适用于需要自然语言处理能力的多种场景。尤其对于那些
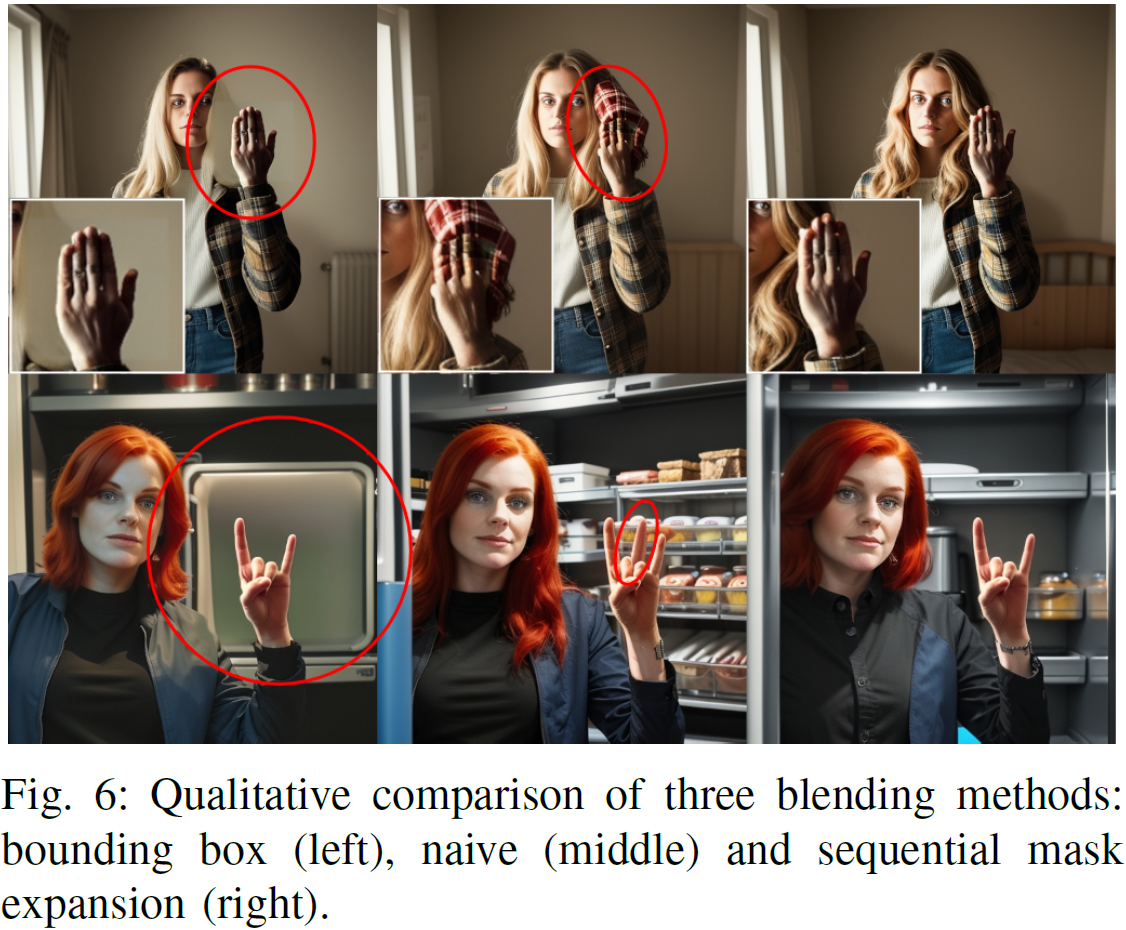
(2024,手部生成,关键点热图,修复和外画,SD)Giving a Hand to DM:改进条件人类图像生成的两阶段方法
Giving a Hand to Diffusion Models: a Two-Stage Approach to Improving Conditional Human Image Generation 公和众和号:EDPJ(进 Q 交流群:922230617 或加 VX:CV_EDPJ 进 V 交流群) 目录 0. 摘要 2. 相关工作 3. 方法 B. 多任务手部生成

HAND-HAP-构建项目步骤
配置数据源 D:\apache-tomcat-8.5.24\conf\context.xml <Resource auth="Container" driverClassName="com.mysql.jdbc.Driver" url="jdbc:mysql://localhost:3306/hap_shipments" name="jdbc/hap_shipments" type="javax

js报错:Invalid left-hand side in assignment
js报错如下: Uncaught ReferenceError: Invalid left-hand side in assignment 写完js后,页面在加载的时候,一直如上的错误,仔细检查发现js在做对比的时候,少写一个=; if( mbQ == undefined || mbA = undefined) { alert("页面预加载失败,请从新点击,进入此页面!"); return;
vue3-hand-mobile
当我写完手势移动事件后,我又通过svg的方法添加了一段文字和polygon。当我在这个蓝色的polygon上滑动手势的时候,会报错。 可能这个bug只是我个人的代码导致的。但是我觉得vue3-hand-mobile插件的这一段代码写的有问题。 我通过circular-json库修复了这个问题: 1、安装npm install -S circular-json 。 2、将circular
iOSPhotos/Photos.h与AssetsLibrary/AssetsLibrary.hand 相机
首先这篇博客中有一个比较重要的类是参照一个博客中的因为具体的博客地址忘记了,所以见谅,后期会加上地址 这篇博客主要是对两种获取系统相册以及通过相机拍摄图片处理进行比较,分别是<AssetsLibrary/AssetsLibrary.h>,和<Photos/Photos.h>,并且会提供最新的<Photos/Photos.h>框架的使用demon至于<AssetsLibrary/AssetsL

HDU 3926 Hand in Hand(同构图)
链接: http://acm.hdu.edu.cn/showproblem.php?pid=3926 原题: Hand in Hand Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 122768/62768 K (Java/Others) Total Submission(s): 731 Accepted
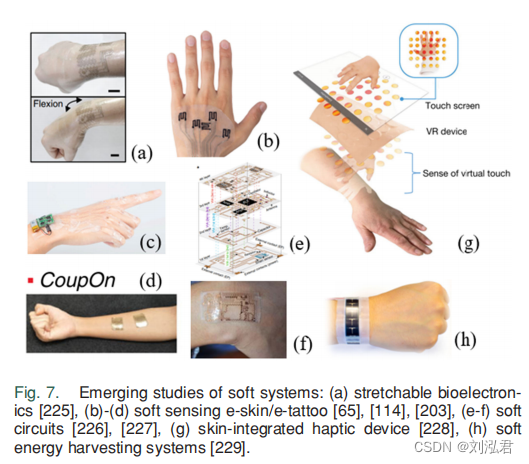
读论文,第十天:Emerging Wearable Interfaces and Algorithms for Hand Gesture Recognition: A Survey
手在广泛的日常活动中是至关重要的,阻碍手部功能的神经系统疾病会显著影响生活质量。可穿戴的手势界面有望恢复和辅助手的功能,并增强人机通信和人机通信。本文综述的目的是综合目前新的手势识别传感接口和算法,应用范围包括康复、假肢控制、增强外骨骼、手语识别、人机交互和用户认证。结果表明,电、机械、声学/振动和光学感知是手势识别界面的主要输入方式。我们确定了两类算法:1)预定义的固定手部姿势的分类算法和2)连

手势识别2020(一)Weakly-supervised Domain Adaptation via GAN and Mesh Model for Estimating 3D Hand Poses
《Weakly-supervised Domain Adaptation via GAN and Mesh Model for Estimating 3D Hand Poses Interacting Objects》论文解读 Abstract 1. Introduction 2. Domain Adaptation Framework 2.1. Training 2.1.1. 2D he
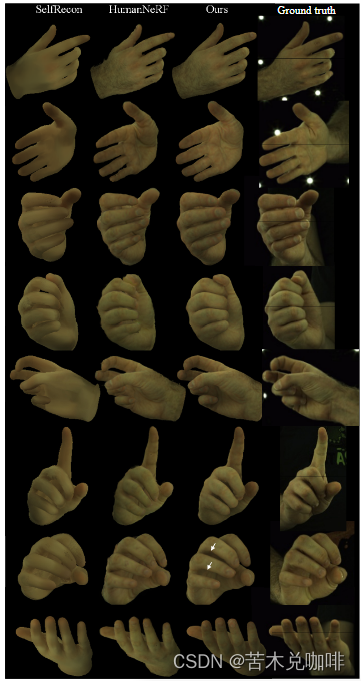
Hand Avatar: Free-Pose Hand Animation and Rendering from Monocular Video
Github: https://seanchenxy.github.io/HandAvatarWeb 1、结构摘要 MANO-HD模型:作为高分辨率网络拓扑来拟合个性化手部形状将手部几何结构分解为每个骨骼的刚性部分,再重新组合成对的几何编码,得到一个跨部分的一致占用场纹理建模:在MANO-HD表面设计了可驱动的anchor,记录反照率;定向软占用用于描述光线-表面关系,生成照明场,进一步用于解
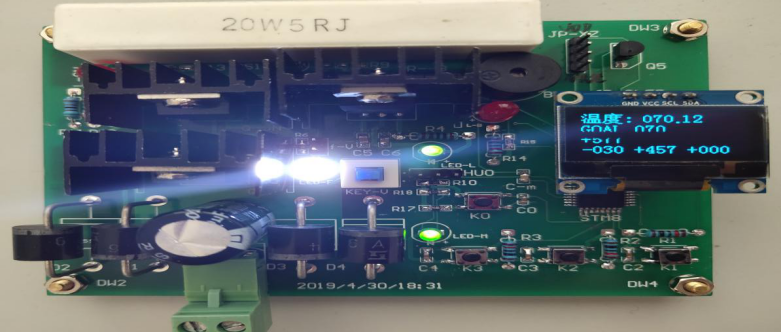
Green hand_程控加热器
时间:2019/3/26-2019/4/25 一.题目要求: A.基础部分 (1)能显示控制温度和实际工作温度; (2)可用键盘设置工作温度,温控误差要求误差±2℃; (3)温度低于30℃时,风扇停止散热,加热器工作;当温度高于70℃,切断加热器,并且接通风扇开始散热; (4)达到预定温度、上下限温度时,能声光报警; (5)自制直流电源。 B.发挥部分 (1)能显示加热功率和风扇转速
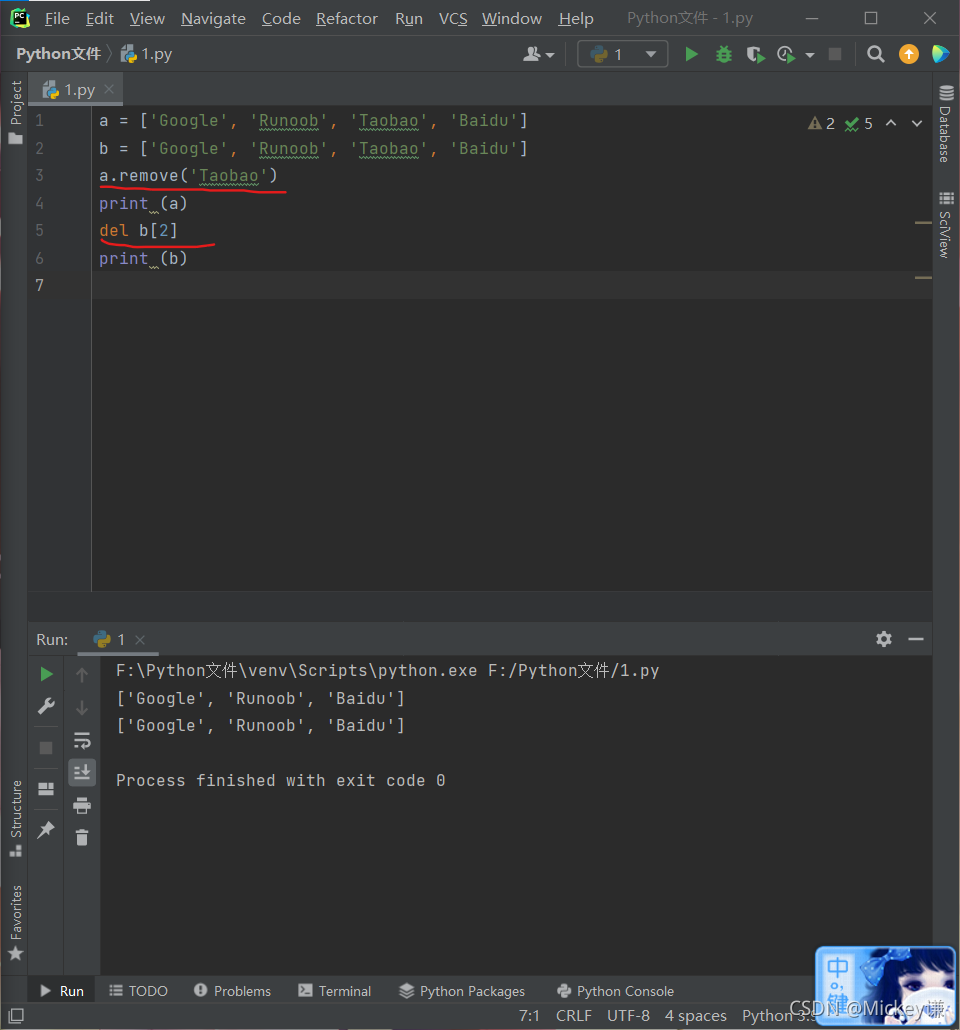
Green Hand Python学习过程2
1、关于Python字符串格式化符号的一些用法: https://www.cnblogs.com/wj12312/p/10490753.html 这里就引用一位大佬的心得了,讲的挺详细,链接放在这里也便于我之后复习。 2、在使用字符串格式化符号时,要注意不能加逗号,如图: 3、在学习菜鸟教程时发现上面有一句话,说%g是%f和%e的简写 我也不明白是什么意思,又看了下本篇教程下

【手眼标定】ros/easy_handeye+ur5e+realsense D435i(eye on/to hand)
前言 此前有尝试过使用Matlab Tsai原理标定珞石工业机械臂,效果不是很好,也没有找到原因在哪里。终于来了北京实验室可以用UR5e在ROS框架下使用easy_handeye标定了,十分简洁哈哈哈哈哈 提示:以下是内容严重参考链接:https://zhuanlan.zhihu.com/p/92339362 十分感谢前人大佬的分享 0. 手眼标定原理 参考大佬深入浅出的解释 重点:
现有库存(on-hand inventory),库存水平(inventory level),库存位置(inventory position)
库存管理中,这几个名词特别容易混,干脆写一篇博客总结下。 现有库存(on-hand inventory),是指持有的真实库存量 库存水平(inventory level),现有库存减去延迟交付的订单 inventory level = on-hand inventory − backorder quantity \text{inventory level} = \text{on-hand
现有库存(on-hand inventory),库存水平(inventory level),库存位置(inventory position)
库存管理中,这几个名词特别容易混,干脆写一篇博客总结下。 现有库存(on-hand inventory),是指持有的真实库存量 库存水平(inventory level),现有库存减去延迟交付的订单 inventory level = on-hand inventory − backorder quantity \text{inventory level} = \text{on-hand
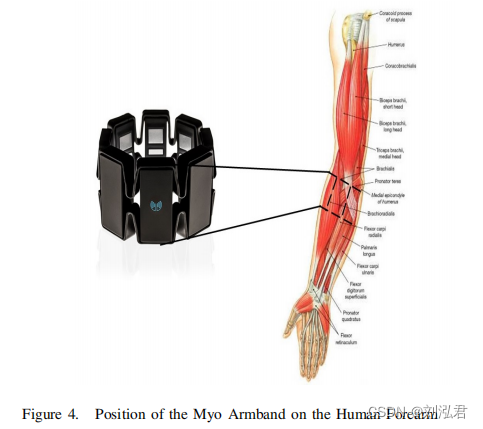
读论文,第八天:Recognition of Human Arm Gestures Using Myo Armband for the Game of Hand Cricket
手势识别是生物机器人技术领域的最新进展。本文提出了一种基于低成本传感器的手板球游戏手势识别技术。手板球在南亚国家是一种流行的游戏,它涉及到使用人类的手指手势来得分。这个游戏通常在两个玩家之间进行。每个玩家都有一个预先定义的手势来表示得分1、2、3、4和6。这两名球员都必须戴着Myo的袖章。Myo臂带用于捕获在每一个肌肉动作中触发的生物电位。在这个游戏中执行的各种手势会触发各种肌肉群信号。一个数据集