estimation专题

【python】OpenCV—Single Human Pose Estimation
文章目录 1、Human Pose Estimation2、模型介绍3、基于图片的单人人体关键点检测4、基于视频的单人人体关键点检测5、左右校正6、关键点平滑7、涉及到的库函数scipy.signal.savgol_filter 8、参考 1、Human Pose Estimation Human Pose Estimation,即人体姿态估计,是一种基于计算机视觉和深度学习的技

2010-ECCV - Two-phase kernel estimation for robust motion deblurring
项目地址:http://www.cse.cuhk.edu.hk/~leojia/projects/robust_deblur/index.html 贾佳亚团队 边缘预测与边缘选择,过滤细微结构对于模糊核估计的影响分两阶段估计模糊核,第一阶段:L2范数,第二阶段:L1范数图像先验,在估计模糊核过程中使用空间结构先验,非盲阶段时使用TV范数 文章首先了图像结构如何影响模糊核结构: Salien

AlphaPose姿态估计论文翻译和代码解读RMPE: Regional Multi-Person Pose Estimation
姿态估计模型AlphoPose模型的论文 或者论文V3版 ICCV2017接收,上海交大和腾讯优图的论文 代码 ,基于pytorch或者Tensorflow 如果想了解姿态估计的简单概述,可以点击我的另一篇综述文章 RMPE: Regional Multi-Person Pose Estimation Abstract 自然场景的多人姿态估计是一个极大的挑战。虽然最好的人类检测器已经有很好的

拥挤场景多人姿态估计论文梗概及代码CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark
姿态估计是视频动作分析识别的基础工作,我有一篇小综述讲了姿态估计相关技术路线的发展,可以点这个链接看。 本文是MVIG大佬们发表在CVPR2019上的一篇论文,上号交通大学,基于AlphaPose思路,进一步提升了拥挤情况下准度 代码:github点这,基于Pytorch,是实时多人姿态估计系统 论文:论文点这 论文第二版点这 Abstract 多人姿态估计是大量计算机视觉任务的基础,近年来也

姿态估计Rethinking on Multi-Stage Networks for Human Pose Estimation论文梗概及代码解读
2018年COCO关键点检测冠军算法MSPN,姿态估计,Top-down的技术路线 应该是截止2019年10月26日时开源的最好的姿态估计算法之一了 旷世出品 代码链接点这,是基于Pytorch的 论文链接点这 摘要 姿态估计方法以基本形成one-stage 和 multi-stage两个路线 多阶段看上去更适合任务,但是现在多阶段的性能还是不如单阶段的 我们论文就来研究这个问题,我们讨论当下
【论文精读】分类扩散模型:重振密度比估计(Revitalizing Density Ratio Estimation)
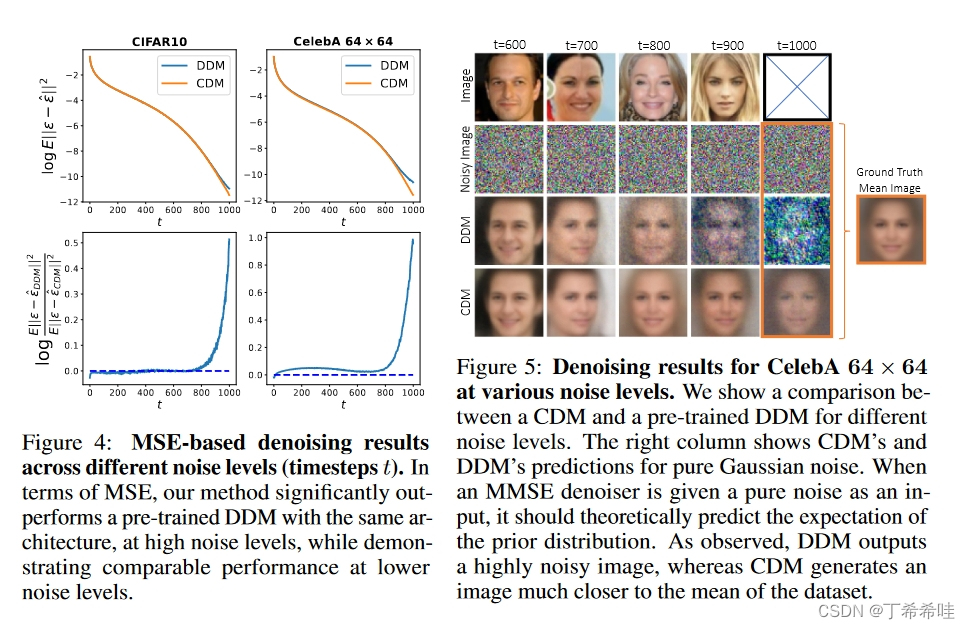
文章目录 一、文章概览(一)问题的提出(二)文章工作 二、理论背景(一)密度比估计DRE(二)去噪扩散模型 三、方法(一)推导分类和去噪之间的关系(二)组合训练方法(三)一步精确的似然计算 四、实验(一)使用两种损失对于实现最佳分类器的重要性(二)去噪结果、图像质量和负对数似然 论文:Classification Diffusion Models: Revitalizing

Age and gender estimation based on Convolutional Neural Network and TensorFlow
训练数据处理 imdb数据提取 gender: 0 for female and 1 for male, NaN if unknown age: 年龄分为101类,分别为从0到100岁. 将训练数据转换为tfrecords格式,命令为, python convert_to_records_multiCPU.py --imdb --nworks 8 --imdb_db /home/rese

论文翻译 BING: Binarized Normed Gradients for Objectness Estimation at 300fps
BING: Binarized Normed Gradients for Objectness Estimation at 300fps Ming-Ming Cheng, Ziming Zhang, Wen-Yan Lin, Philip Torr, IEEE CVPR, 2014 基于二值化赋范梯度特征的一般对象估计 摘要: 通过训练通用的对象估计方法来产生一组候选对象窗口,能够加速传

【python】OpenCV—Background Estimation(15)
文章目录 中值滤波中值滤波得到图像背景移动侦测 学习来自 OpenCV基础(14)OpenCV在视频中的简单背景估计 中值滤波 中值滤波是一种非线性平滑技术,主要用于数字信号处理,特别是在图像处理中去除噪声。 一、定义与原理 定义:中值滤波是将每一像素点的灰度值设置为该点某邻域窗口内的所有像素点灰度值的中值。 原理:基于排序统计理论,通过把数字图像或数字序列中一点的值

配置 human_pose_estimation_demo 的开发环境
配置 human_pose_estimation 的开发环境 主要讲述如何在 VS2017 IDE 里面配置 OpenIVNO 的演示案例 human_pose_estimation_demo 开发环境。 1. 开发环境说明 系统版本:windows 10OpenVINO 版本:2020 1IDE :VS2017 2. 创建项目 打开 VS017 ,新建项目,在新建项目时选择空项目 然后

Realtime_Multi-Person_Pose_Estimation训练问题
https://blog.csdn.net/kkae8643150/article/details/102711101 前言 最近在研究Realtime_Multi-Person_Pose_Estimation的训练和再训练的过程。 参考 https://blog.csdn.net/qq_38469553/article/details/82119292 以及官方github https://
(论文阅读-优化器)Selectivity Estimation using Probabilistic Models
目录 摘要 一、简介 二、单表估计 2.1 条件独立Condition Independence 2.2 贝叶斯网络Bayesian Networks 2.3 查询评估中的贝叶斯网络 三、Join选择性估计 3.1 两表Join 3.2 概率关系模型 3.3 使用PRMs的选择性估计 四、PRM构建 4.1 评分标准 4.2 参数估计 4.3 结构选择 4.3.1

【光流评估】《Optical Flow Estimation using a Spatial Pyramid Network》2016 Tubingen, Germany
摘要:我们通过结合深度学习和经典空间金字塔结构的方式来计算光流。通过使用每个金字塔级别的光流评估warp图像和更新光流,这种方法以一个粗到精的方式评估图像中的大运动。不同于在每个金字塔层级最小化对象函数。我们在每个层级训练网络,以计算光流更新。不像最近的FlowNet光流网络,本网络不需要处理大运动,由网络中的金字塔层级处理大运动。这有几个优点:(1)在模型参数上我们的SpyNet更简单,比Flo
GNU Radio之OFDM Channel Estimation底层C++实现
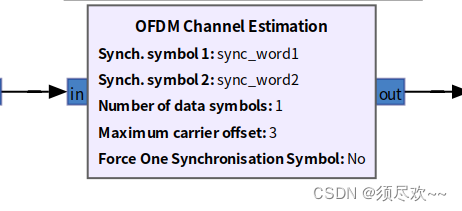
文章目录 前言一、 OFDM Channel Estimation 模块简介二、C++ 具体实现1、初始化和配置参数2、forecast 函数3、计算载波偏移量4、提取信道响应5、核心的数据处理任务 前言 OFDM Channel Estimation 模块的功能是根据前导码(同步字)估计 OFDM 的信道和粗略频率偏移,本文对 OFDM Channel Estimatio

Software Sizing, Estimation, and Risk Management
版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章原始出版、作者信息和本声明。否则将追究法律责任。 http://blog.csdn.net/topmvp - topmvp Software Sizing, Estimation, and Risk Management: When Performance is Measured Performance Improves is a

Stacked Hourglass Networks for Human Pose Estimation 用于人体姿态估计的堆叠沙漏网络
Stacked Hourglass Networks for Human Pose Estimation 用于人体姿态估计的堆叠沙漏网络 这是一篇关于人体姿态估计的研究论文,标题为“Stacked Hourglass Networks for Human Pose Estimation”,作者是 Alejandro Newell, Kaiyu Yang, 和 Jia De
鲁棒线性模型估计(Robust linear model estimation)
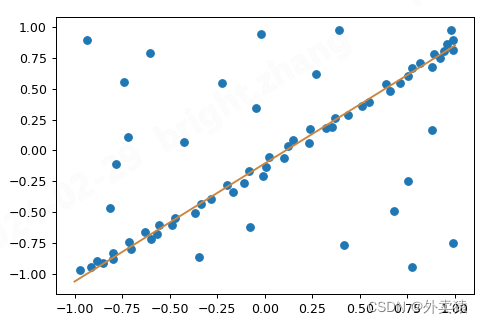
鲁棒线性模型估计 1.RANSAC算法1.1 算法的基本原理1.2 迭代次数N的计算1.3 参考代码 参考文献 当数据中出现较多异常点时,常用的线性回归OLS会因为这些异常点的存在无法正确估计线性模型的参数: W = ( X T X ) − 1 X T Y \qquad \qquad W=(X^TX)^{-1}X^TY W=(XTX)−1XTY 此时就需要寻找更鲁棒的方法过滤掉

论文阅读:AdaBins: Depth Estimation using Adaptive Bins
Motivation 信息的全局处理会帮助提高整体深度估计。提出的AdaBins预测的bin中心集中在较小的深度值附近,对于深度值范围更广的图像,分布广泛。Fu et al. 发现将深度回归任务转化为分类任务可以提升效果,将深度范围分成固定数量的bins。本文则解决了原始方法的多个限制: 计算根据输入场景的特征动态变化的自适应箱。分类方法导致深度值的离散化,导致视觉质量差,深度不连续明显,论文提
![[文献翻译] Space-variant blur kernel estimation and image deblurring through kernel clustering](https://gitee.com/Sweetmile/imagehost/raw/master/1580634917_20200202164546749_325.png)
[文献翻译] Space-variant blur kernel estimation and image deblurring through kernel clustering
目录 写在前面基于核聚类的空变模糊核估计以及图像去模糊摘要关键字 1. 介绍2.相关工作3.模糊核估计和去模糊框架3.1 图像块模糊核估计3.2 使用核聚类以优化模糊核3.3 通过图像融合进行空变去模糊 4. 实验结果5. 讨论6. 结论参考文献 写在前面 文章:Space-variant blur kernel estimation and image deblurring t

win10下采用XShell+Xmanager运行lightweight-human-pose-estimation
目录 1.背景 2.系统及软件配置 3.开始工作 4.各种报错以及解决方案 4.1 No module named “XXX” 4.2 ImportError: libGL.so.1: cannot open shared object file: No such file or directory 4.3 qt.qpa.plugin: Could not load the Qt

论文笔记 - Omnidirectional stereo depth estimation based on spherical deep network
论文笔记 Omnidirectional stereo depth estimation based on spherical deep network 本文是2021 Image and Vision Computing上的一篇文章。IVC算是领域内认可度较高的期刊之一。本文针对双目全景深度估计,提出了基于球面卷积的级联网络,将全景图的平面投影转换到球面表示,获取了高精度的全景深度图。 本文链
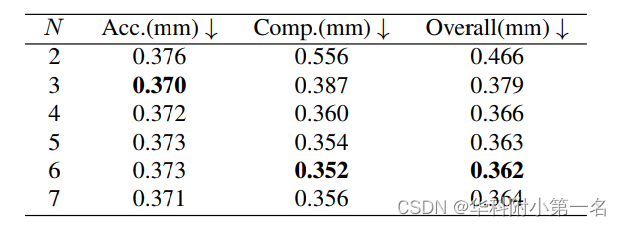
【论文简述】IterMVS: Iterative Probability Estimation for Efficient Multi-View Stereo(CVPR 2022)
一、论文简述 1. 第一作者:Fangjinhua Wang 2. 发表年份:2022 3. 发表期刊:CVPR 4. 关键词:MVS、深度学习、GRU、分类+回归 5. 探索动机:较低的运行时间和功耗是大多数工业应用的关键,因此资源友好性的方法变得更加重要。MVSNet由于3D CNN的原因,很难处理高分辨率的图像。循环的方法(GRU,LSTM)减少了内存消耗,但是运行时间变长了。级联
好书分享:Control and Estimation with MATLAB(5th Edition)pdf
《基于MATLAB的控制与估计》(第5版)由八章组成,包括控制算法和设计。主要内容包括状态估计和数据平滑、RLS和卡尔曼滤波器状态估计、控制系统设计、自适应控制和PID。书中的概念已经使用MATLAB和Simulink实现。提供了可下载的MATLAB和Simulink文件。 适合人群:大学生、研究生、控制类工程研究人员。 Preface:本书基于作者大部分的工作经验,旨在概述或
![[深度估计]RIDERS: Radar-Infrared Depth Estimation for Robust Sensing](https://img-blog.csdnimg.cn/direct/59775cc2cdb84404b75b21fd2f2dbd31.png#pic_center)
[深度估计]RIDERS: Radar-Infrared Depth Estimation for Robust Sensing
RIDERS: 恶劣天气及环境下鲁棒的密集深度估计 论文链接:https://arxiv.org/pdf/2402.02067.pdf 作者单位:浙江大学, 慕尼黑工业大学 代码链接:https://github.com/MMOCKING/RIDERS 1. 摘要(Abstract) 恶劣的天气条件, 包括雾霾、灰尘、雨雪和黑暗, 给准确的密集深度估计带来了巨大挑战。对于依赖

Openpose翻译 Realtime Multi-Person 2D Pose Estimation Using Part Affinity Fields
openpose 论文 实现代码 中文翻译 Abstract 我们提出了一种有效检测多人图像中的2D姿势的方法。 该方法使用非参数表示,我们称之为部分亲和力 字段(PAF),用于学习将图像中的身体部位与个体联系起来。 该体系结构编码全局上下文,允许贪婪的自下而上解析步骤,无论图像中的人数多少,同时实现高精度和实时性能。 架构旨在将学习关节点和关节点之间的连接融合起来,通过相同顺序的两个
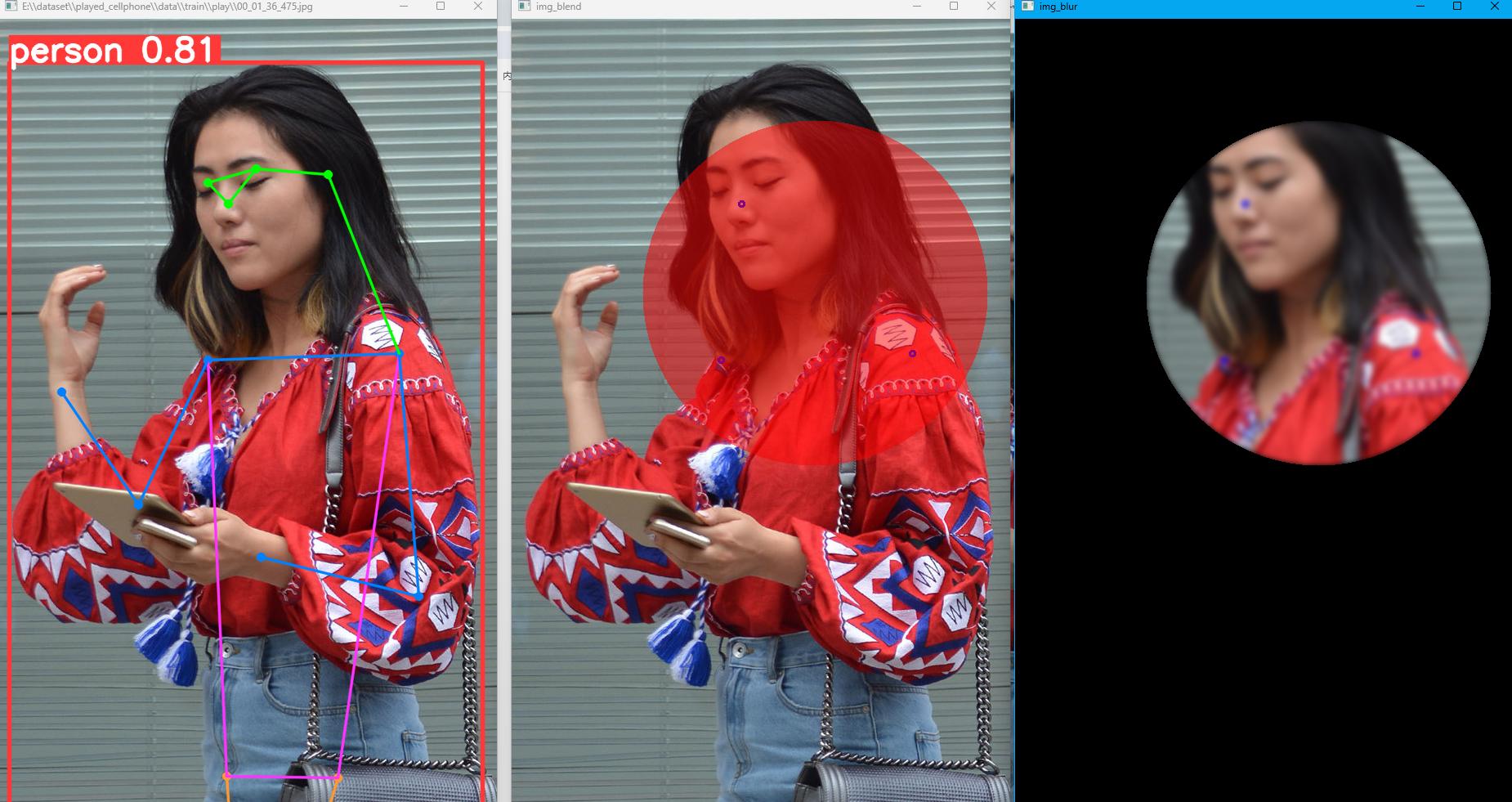
利用YOLOv8 pose estimation 进行 人的 头部等马赛克
文章大纲 马赛克几种OpenCV 实现马赛克的方法高斯模糊 pose estimation 定位并模糊:三角形的外接圆与膨胀系数实现实现代码实现效果 参考文献与学习路径 之前写过一个文章记录,怎么对人进行目标检测后打码,但是人脸识别有个问题是,很多人的背影,或者侧面无法识别出来人脸,那么我们就可以用姿态估计中的关键点信息进行补充,对人头进行打码,从而进一步的保护隐私信息。