clouds专题

(已开源-ICRA2023) High Resolution Point Clouds from mmWave Radar
本文提出了一种用于生成高分辨率毫米波雷达点云的方法:RadarHD,端到端的神经网络,用于从低分辨率雷达构建类似激光雷达的点云。本文通过在大量原始雷达数据上训练 RadarHD 模型,同时这些雷达数据有对应配对的激光雷达点云数据。本文的实验表明,即使是在未遇见过的场景以及存在严重烟雾遮挡的情况下,RadarHD也能生成丰富的点云数据。同时,这些生成的点云也能应用于现有的激光雷达里程计和建图方法中

concatenate clouds
写在这儿方面以后查找阅览---------------------------- 代码来自PCL点云库那本书--------------------------- #include "stdafx.h" #include <iostream> #include <pcl/io/pcd_io.h> #include <pcl/point_types.h> //连接两个点云的字段或者数

【综述翻译:第二章】Deep Learning for 3D Point Clouds: A Survey
Deep Learning for 3D Point Clouds: A Survey为国防科技大学发布的综述文章,这里只翻译第二章。 下载链接:https://arxiv.org/abs/1912.12033; 仓库链接:https://github.com/QingyongHu/SoTA-Point-Cloud 2 3D形状分类 这些方法通常首先学习每个点的嵌入,然后使用聚合方法从整个点云

【综述翻译】Deep Learning for 3D Point Clouds: A Survey
Deep Learning for 3D Point Clouds: A Survey为国防科技大学发布的综述文章,这里只翻译摘要,第一章与第三章。 下载链接:https://arxiv.org/abs/1912.12033; 仓库链接:https://github.com/QingyongHu/SoTA-Point-Cloud。 翻译第二章,戳这里 摘要 由于点云学习在计算机视觉,自动驾驶和

Learning Representations and Generative Models for 3D Point Clouds
转 计算机小白学习中查看完整翻译. 点击下载英文论文 Abstract Three-dimensional geometric data offer an excellent domain for studying representation learning and generative modeling. In this paper, we look at geometric data
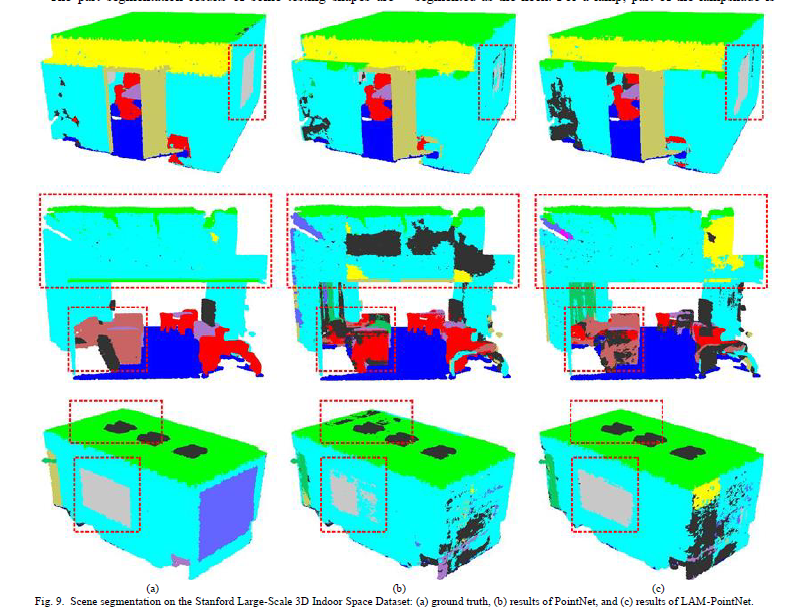
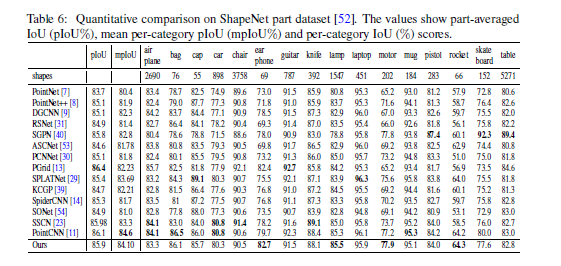
Lightweight Attention Module for Deep Learning on Classification and Segmentation of 3D Point Clouds
Lightweight Attention Module for Deep Learning on Classification and Segmentation of 3D Point Clouds Yunhao Cui, Yi An, Member, IEEE, Wei Sun, Huosheng Hu, Senior Member, IEEE, and Xueguan Song 年份:2
2020-Point attention network for semantic segmentation of 3D point clouds
Point attention network for semantic segmentation of 3D point clouds Mingtao Fenga, Liang Zhangb, Xuefei Linc, Syed Zulqarnain Gilanid and Ajmal Miand* 年份:2020 期刊:Pattern Recognition IF:7.196 1、创
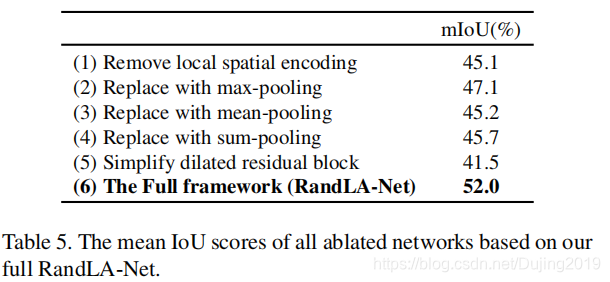
CVPR 2020——RandLA-Net: Efficient Semantic Segmentation of Large-Scale Point Clouds (已开源)
CVPR 2020 | RandLA-Net:大场景三维点云语义分割新框架(已开源) Authors(一) Abstract(二) Introduction(三) Related Work(四) RandLA-Net4.1. Overview4.2. The quest for efficient sampling4.3. Local Feature Aggregation4.4. Impl
论文笔记(四十)Goal-Auxiliary Actor-Critic for 6D Robotic Grasping with Point Clouds
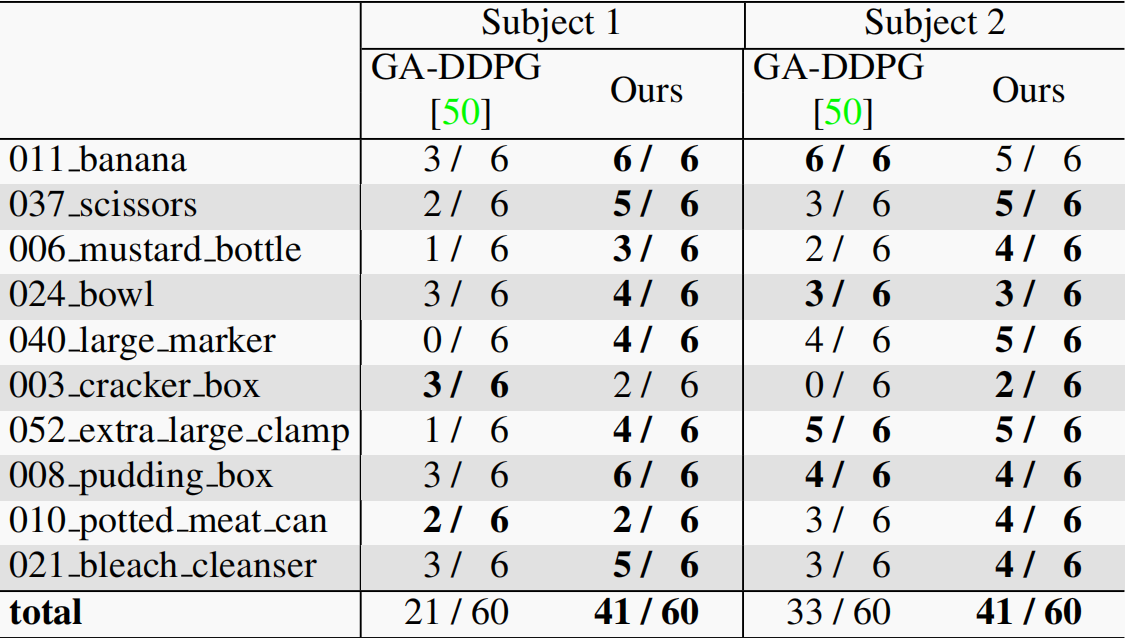
Goal-Auxiliary Actor-Critic for 6D Robotic Grasping with Point Clouds 文章概括摘要1. 介绍2. 相关工作3. 学习 6D 抓握政策3.1 背景3.2 从点云抓取 6D 策略3.3 联合运动和抓握规划器的演示3.4 行为克隆和 DAGGER3.5 目标--辅助 DDPG3.6 对未知物体进行微调的后视目标 4. 实验4.1
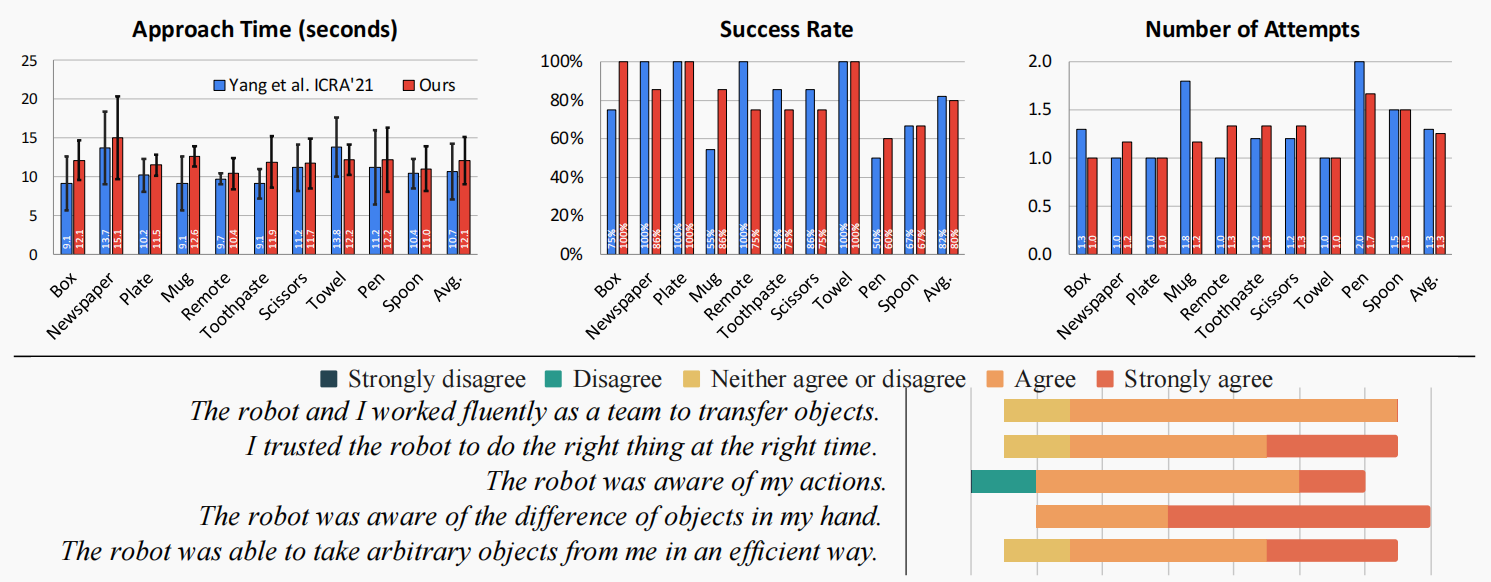
论文笔记(三十九)Learning Human-to-Robot Handovers from Point Clouds
Learning Human-to-Robot Handovers from Point Clouds 文章概括摘要1. 介绍2. 相关工作3. 背景3.1. 强化学习3.2. 移交模拟基准 4. 方法4.1. Handover Environment4.2. 感知4.3. 基于视觉的控制4.4. 师生两阶段培训 (Two-Stage Teacher-Student Training) 5.

【点云学习系列】之Fast segmentation of 3d point clouds for ground vehicles
简介 在上一篇文章pcl学习系列之GroundSegmentation滤波(一)通过使用pcl库来回归拟合平面进行地面点提取,本篇博文介绍一篇2010年的快速地面点云分割算法,该论文链接:Fast segmentation of 3d point clouds for ground vehicles,当然,作者还是很赞的开源了代码,传送门Github。当然,我也调试作者的代码,同时进行一定的

【环境配置】Towards Globally Optimal Normal Orientations for Large Point Clouds
文章目录 一、所用环境二、环境配置 一、所用环境 windows 10 22H2(内部版本 19045.3693)该版本主要是为了兼容vs2022vs2022 professioncmakevcpkg 二、环境配置 1、安装vcpkg $ git clone https://github.com/microsoft/vcpkg$ .\vcpkg\bootstrap-vcp
<论文阅读> CorAl – 点云是否正确对齐? CorAl – Are the point clouds Correctly Aligned?
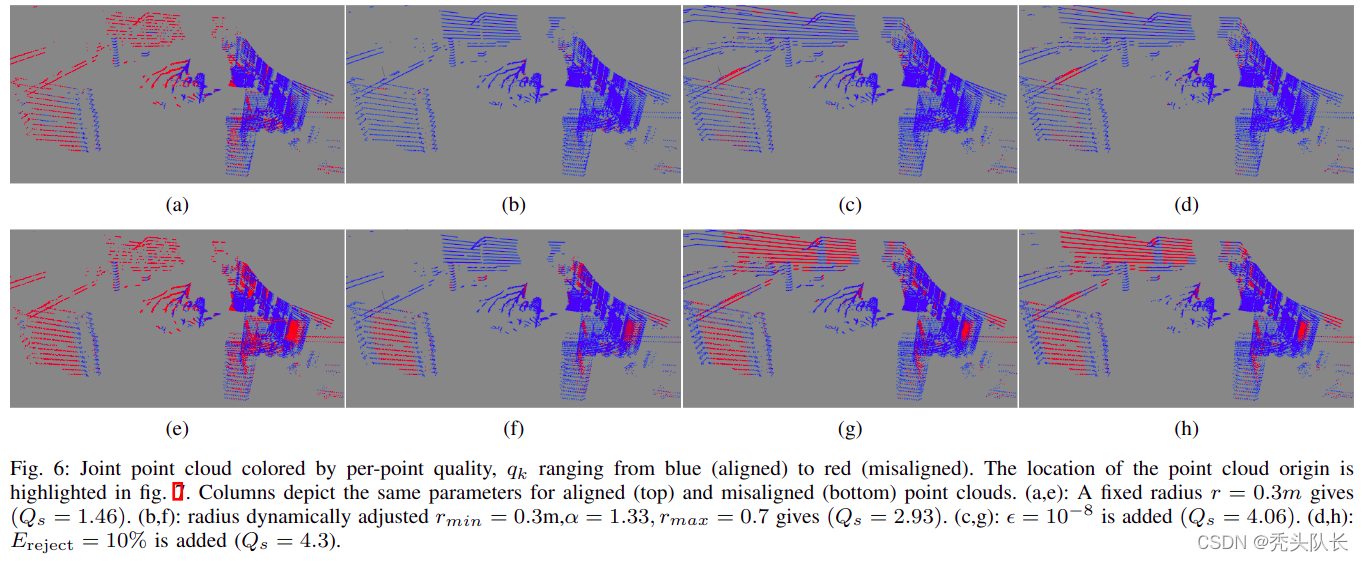
【摘要】:在机器人感知中,许多任务依赖于点云配准。然而,目前还没有一种方法可以在没有特定环境参数的情况下可靠地自动检测错位点云。我们提出"CorAl",一种用于点云对的对齐质量度量和对齐分类器,它有助于评估配准性能的能力。 CorAl 比较了两个点云的联合熵和分离熵。分离熵提供了可以认为是环境固有的熵的度量。因此,如果点云正确对齐,则联合熵应明显更低。计算期望熵使得该方法对小的对齐误差也很敏感,这
Online Quadrotor Trajectory Generation and Autonomous Navigationon Point Clouds 点云上的在线四旋翼轨迹生成和自主导航
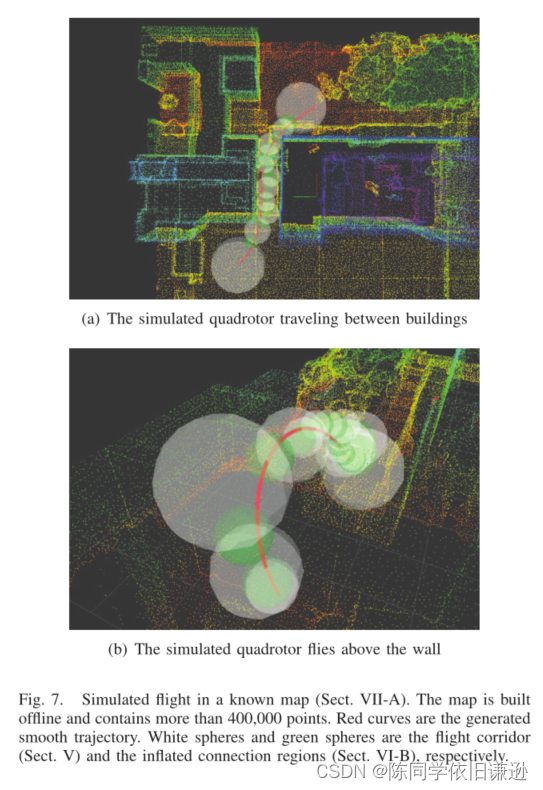
点云上的在线四旋翼轨迹生成和自主导航 摘要 在本文中,我们提出了一种直接在点云上在线生成自主四旋翼飞行安全轨迹的框架。考虑到四旋翼机在未知环境中运行,我们使用三维激光测距仪进行状态估计,同时构建环境的点云图。基于增量构建的点云地图,我们利用KD树中快速最近邻搜索的特性,采用基于采样的路径查找方法,在三维空间中生成具有安全保障的飞行走廊。然后使用在二次约束二次规划(QCQP)中制定的轨迹生成方法
![[论文简述+翻译]Hierarchical Attention Learning of Scene Flow in 3D Point Clouds(TIP 2021)](https://img-blog.csdnimg.cn/img_convert/6e693eca39d44a82887dceeadc124724.png)
[论文简述+翻译]Hierarchical Attention Learning of Scene Flow in 3D Point Clouds(TIP 2021)
论文简述: 第一作者:Guangming Wang 发表年份:2021 发表期刊:IEEE Transactions on Image Processing(TIP) 探索动机:1、如何使两帧点云进行更加有效的对应。2、如何减少场景流精细化过程中的GPU内存消耗,实现精度和资源消耗的平衡。 工作目标:1、实现两帧点云更有效的对应。2、减小GPU内存消耗的同时达到精度的要求 核心思想: 1、提出
【点云处理之论文狂读经典版14】—— Dynamic Graph CNN for Learning on Point Clouds
DGCNN:Dynamic Graph CNN for Learning on Point Clouds 摘要方法Edge ConvolutionDynamic Graph UpdateProperties 实验ClassificationPart SegmentationIndoor Scene Segmentation 展望生词 摘要 背景: 对于计算机图形学中的许多应用而言
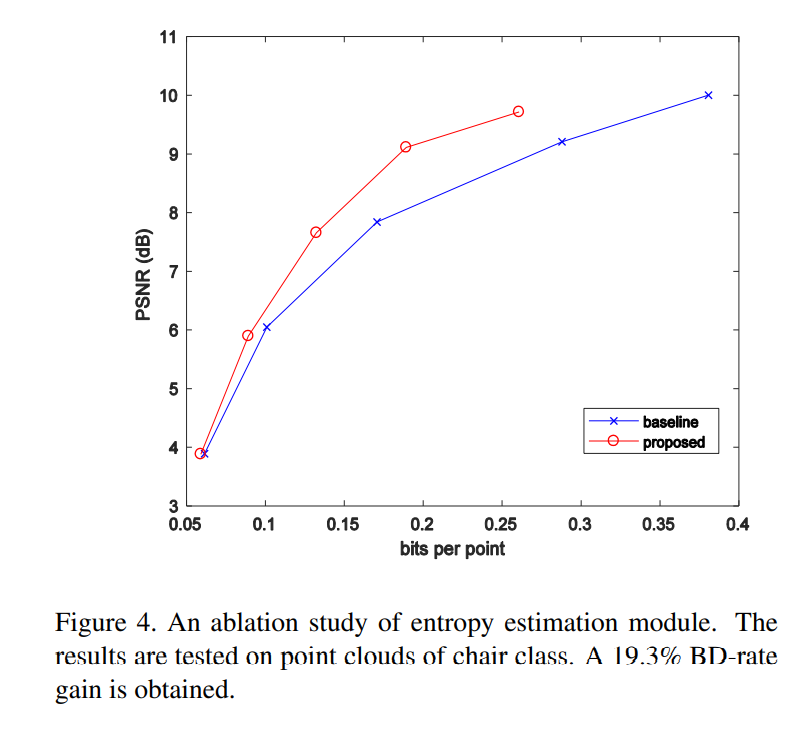
Deep AutoEncoder-based Lossy Geometry Compression for Point Clouds
Deep AutoEncoder-based Lossy Geometry Compression for Point Clouds https://arxiv.org/abs/1905.03691 Sampling layer 在G-PCC中,基于八叉树的几何编码根据量化尺度来控制有损几何压缩,设输入点云为: G-PCC编码器的量化计算如下: 其中 X s h i f t X
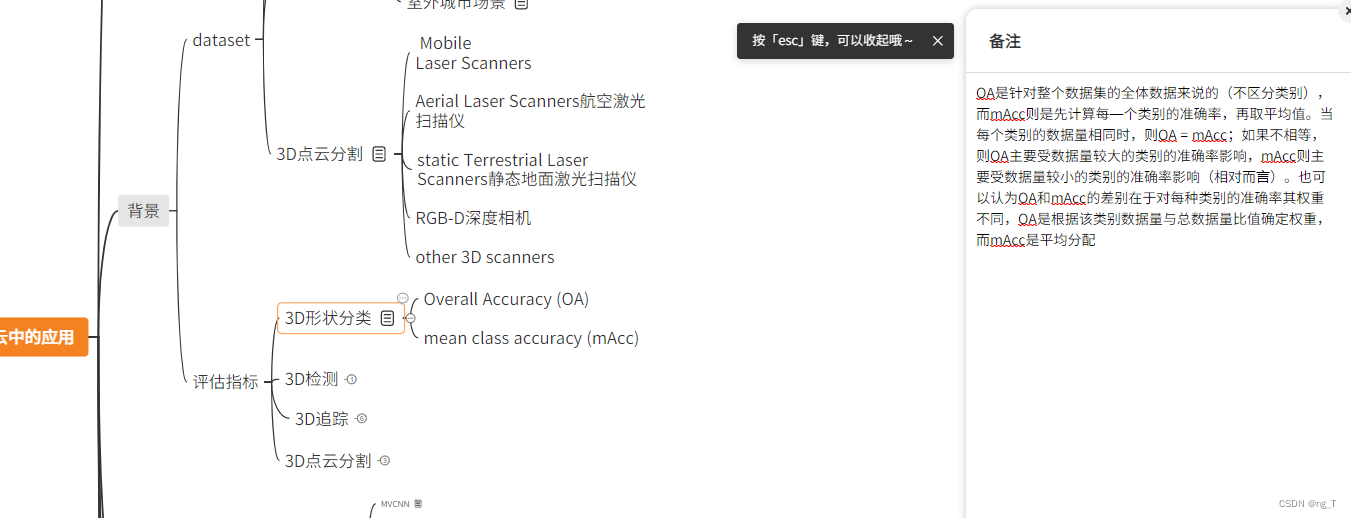
Deep Learning for 3D Point Clouds: A Survey阅读思维导图
深度学习在点云中的应用:阅读时做的思维导图gtmind,下载链接:DeepLearningfor3DPointClouds:ASurvey思维导图-行业报告文档类资源-CSDN文库 如图:
如何递增配准成对点云(How to incrementally register pairs of clouds)
#如何递增配准成对点云 本文档演示了使用Iterative Closest Point算法为了递增地逐个配准一系列点云。 这个想法是转换第一个云框架中的所有云。 这是通过在每个连续云之间找到最佳转换来完成的,并在整个云集上累积这些转换。 您的数据集应包含已经在公共框架(例如在机器人的测距或地图框架中)中大致预先对齐的云并且彼此重叠的云。 我们在 github.com/PointCloudLi
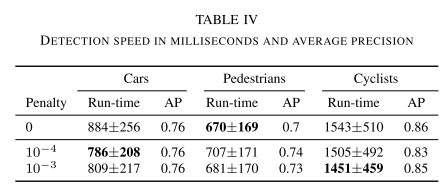
Vote3Deep: Fast Object Detection in 3D Point Clouds Using Efficient CNN论文综述(2016)
1、 为什么要做这个研究(理论走向和目前缺陷) ? 在点云数据集上做3D目标检测这时还没大爆发。 2、 他们怎么做这个研究 (方法,尤其是与之前不同之处) ? 本文思想基本全部借鉴了Vote3D,即用基于投票的滤波器提取特征,这种卷积只在非零的3D网格中做计算,故能够加速。然后ReLU激活。损失函数还要用L1正则化。其中ReLU激活有利于维持中间层特征的稀疏性,能够加速训练,L1正则化能够保证模型

MVF 3D Lidar point clouds
1.Motivation 对于透视图和BEV,两者都有各自的优势。其中透视图在稀疏的点云上进行小物体的检测性能较强,而BEV可以保证物体的距离不变形,即不会发生物体重叠。对于原先的voxel方法,即hard voxel,存在占用内存大,数据损失的缺点,因此如何利用点云内所有的点的信息成为一个问题。 2. Contributions 论文提出一个end-to-end的算法,使用点云中的BEV和
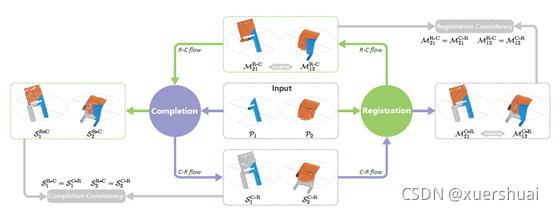
论文阅读Consistent Two-Flow Network for Tele-Registration of Point Clouds
出自:出自深圳大学计算机科学与软件工程学院 期刊:未知 摘要 局部观测值的刚性配准是各个应用领域的一个基本问题。在计算机图形学中,特别注意由扫描设备产生的两个局部点云之间的配准。当两个点云之间的重叠区域很小时,最先进的配准技术很难实现配准,而当扫描对之间没有重叠时,则完全失败。在本文中,我们提出了一种基于学习的技术来缓解这一问题,点云以任意姿态呈现,很少或甚至没有重叠,这种设置被称为tele-r