cloudcompare专题

用CMake构建CloudCompare工程出现VTK找不到的问题
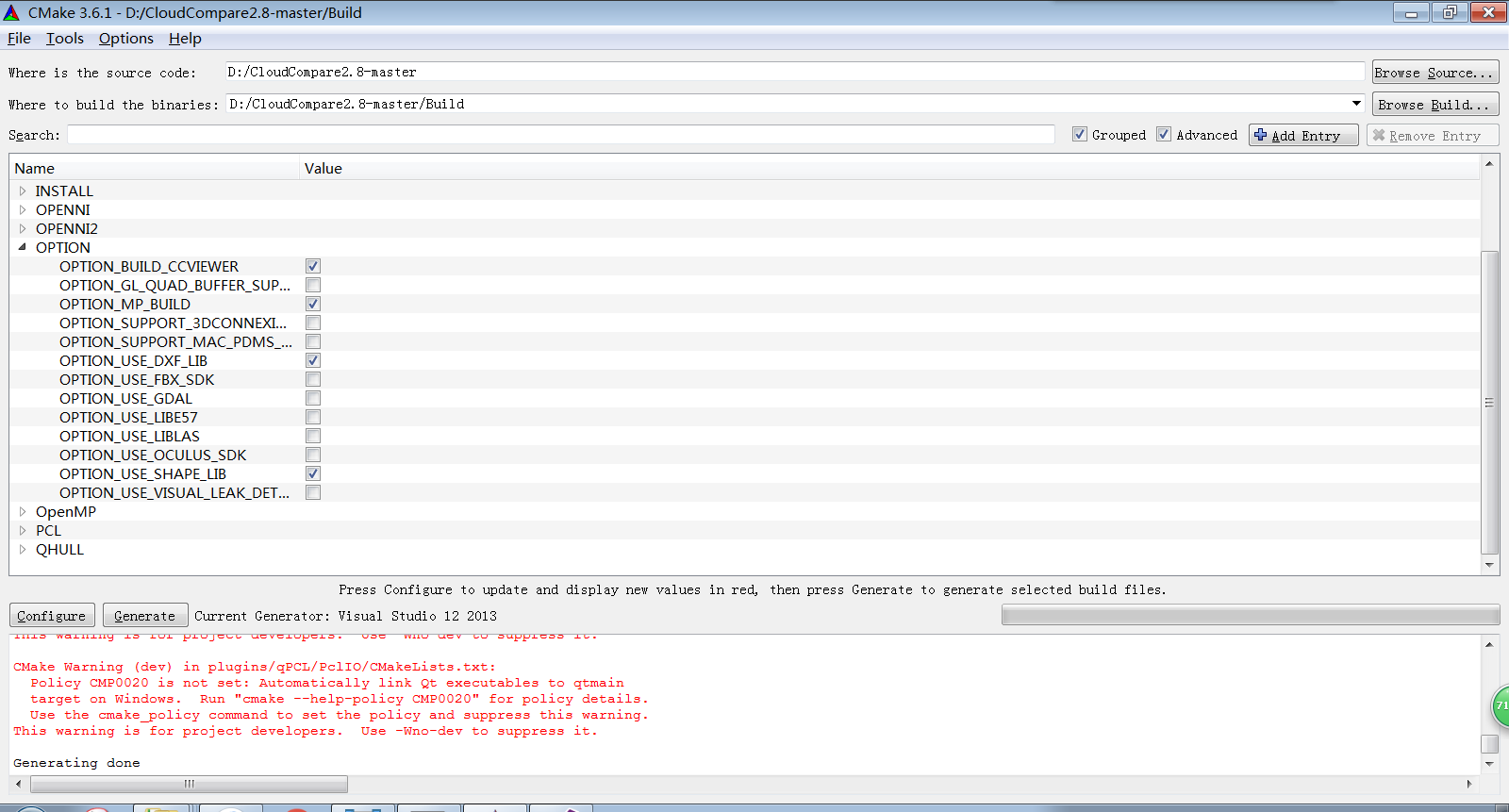
勾选了QPCL_Plugin就可能会出现这个问题 这个问题是因为VTK的环境变量没配置好,仔细读CMake的提示 添加一个VTK_DIR的环境变量,值为包含VTKConfig.cmake的那个目录,哪个目录呢?你在VTK的目录下搜一下就知道啦, 最重要的一步,重启一下电脑,嘻嘻,就OK了.

CloudCompare学习记录(二)教程
1、对齐和配准(Alignment and Registration) (1)总则 ① 三角网(Mesh)是什么 ②严格转换矩阵(rigid tansformation matrices) (2)对齐 ①匹配包围盒中心 ②手工转换 ③选取共同点对 (3)自动配准 ①使用迭代最近点算法精配(ICP,iterative closest point) ②一种配准部分重叠点云的方法
CloudCompare学习记录(一)主要概念
1、菜单 · 文件 (打开, 保存, 退出, 等.) · 编辑 (编辑选择实体和它们的属性--颜色、法向量和标量场(scalar field)等.) · 工具 (分割, 匹配, 投影, 等.) · 显示(显示相关选项) · 插件(加载插件) · 3D视图(3D视图管理) · 帮助(关于, 帮助, 等.) 2、实体: (1)点云(point
点云工具CloudCompare下载、安装与汉化
一、下载 软件免费开源,所以可以直接在官网下载,官网地址: CloudCompare - Open Source project 进入官网后,点击菜单栏【Download】 选择合适系统进行下载 二、安装 常规软件安装流程即可 三、汉化 打开软件后,是英文界面,找到菜单栏【Display】-【Language Translation】,选择简体中文 提示需要重启软
ubuntu 安装 cloudcompare(两种方法)
方法一 :从 snap 安装 (推荐) 安装简单,基本上功能都有(读写保存las,pcd,标注等) 安装: sudo apt-get updatesudo apt install snapsudo snap install cloudcompare 打开: cloudcompare.CloudComparecloudcompare.ccViewer 方法二:从源码进行编译
CCCorelib 点云RANSAC拟合球体(CloudCompare内置算法库)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 RANSAC是一种随机参数估计算法。RANSAC从样本中随机抽选出一个样本子集,使用最小方差估计算法对这个子集计算模型参数,然后计算所有样本与该模型的偏差,再使用一个预先设定好的阈值与偏差比较,当偏差小于阈值时,该样本点属于模型内样本点(内点),否则就是外样本点(外点)。记录当前的内点的个数,然后重复上述的过程,直到

CCCorelib 点云空间采样(CloudCompare内置算法库)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 这个功能感觉也是很实用,它有点类似PCL中的VoxelGrid(体素)滤波器(在CC软件中,该方法为“Octree”中的“Resample”方法),不过其对点与点之间的最小距离有所约束,可以达到控制点间距的目的。虽然其做法可能与体素滤波器有些不同,但是达到的效果却是有些类似。这两种方法均可以在减少点云数据量的同时,还

3D进阶之CloudCompare:使用qt-creator编译
前面我们用VS2019编译好了CC;这里我们用qt-creator来试一下。 关于qt的下载与安装可以参考这里, 3D进阶之OSG: 编译osgQt_高精度计算机视觉的博客-CSDN博客 正好找到一篇类似的文章, CloudCompare导入到Qt Creator(Cmake)_光子乘羽的博客-CSDN博客 所以这里我就不重复造轮子了,讲一些不同的。在开始之前,你需要设置好你的Qt路径

3D进阶之CloudCompare:使用脚本添加git子项目依赖(.gitmodules)并用VS2019编译
(一)如何添加子依赖项目 从github上下载下来的文件,例如, https://github.com/CloudCompare/CloudCompare/archive/refs/tags/v2.12.0.tar.gz 里面明明是有一个在.gitmodules文件的,内容如下, [submodule "plugins/core/IO/qE57IO/extern/libE57Format"
CCCorelib 点云体素中心下采样(CloudCompare内置算法库)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 CloudCompare中的该方法类似于PCL中的ApproximateVoxelGrid方法,即根据我们输入的点云数据构建一个三维体素栅格并进行下采样从而达到滤波效果的方法,在这个过程中每一个体素所包含的点最终都会被体元的几何中心所代替,因此相较于原始数据,下采样之后的数据会有所偏差。 二、实现代码 //
CloudCompare插件开发之点云如何创建、保存并显示?
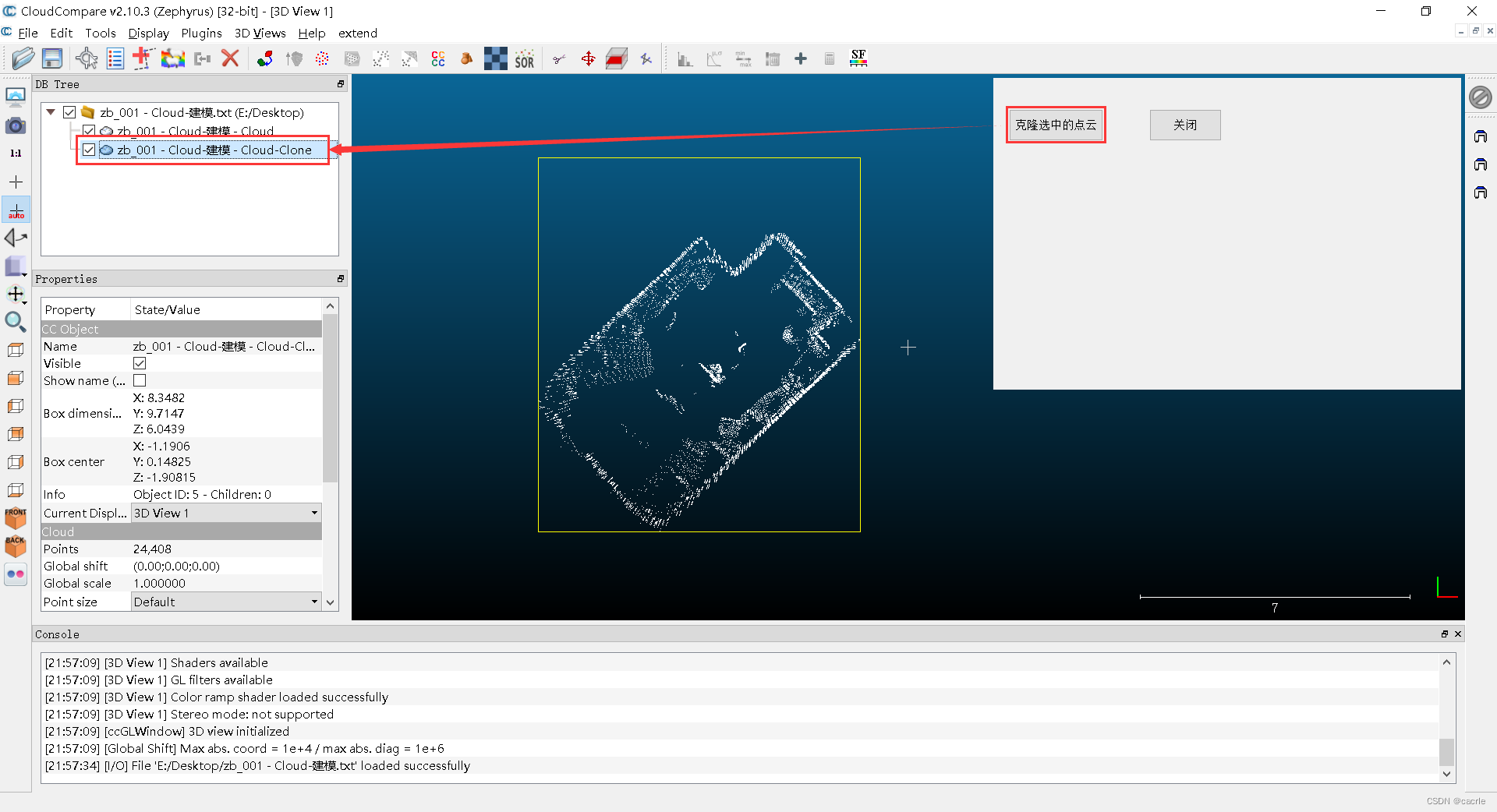
文章目录 0.引言1.创建插件工程2.代码编写3.显示点云4.保存点云 0.引言 CloudCompaer是一款优秀的开源软件,在点云处理时可以根据实际要求开发合适的插件,在实际使用中,创建点云、保存点云、显示点云的操作较为基础,为了使这些操作得到总结,本文实现创建点云、保存并显示。 1.创建插件工程 创建插件流程见:CloudCompare如何进行二次开发之插件开发
CCCorelib 八叉树邻域点查询(CloudCompare内置算法库)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 这里使用CloudCompare特有的八叉树结构实现对指定范围内邻域点集的查询,其操作类似于PCL中八叉树的操作。 二、实现代码 // CloudCompare#include <CCCoreLib/PointCloudTpl.h>#include <CCCoreLib/GenericIndexedCl
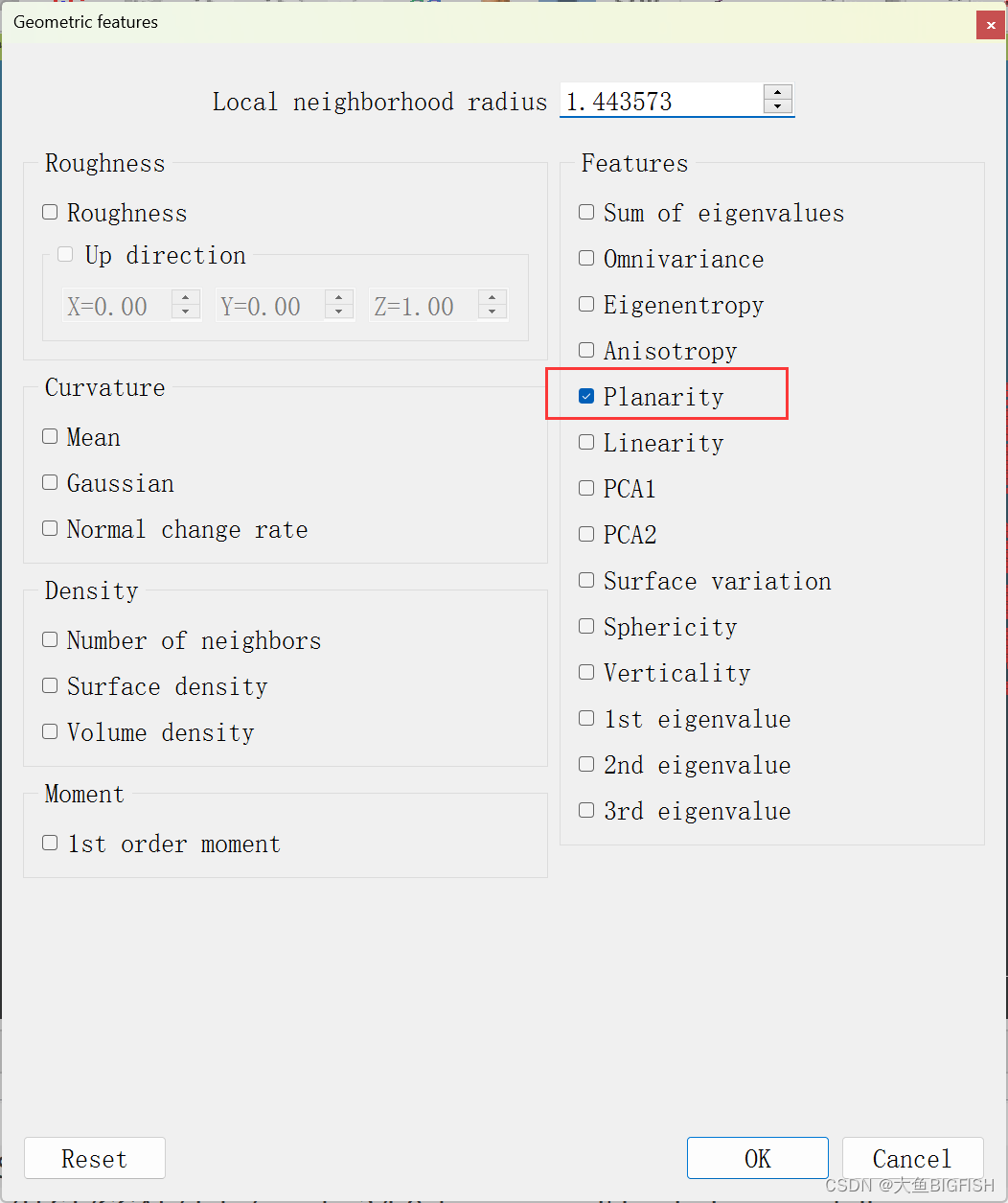
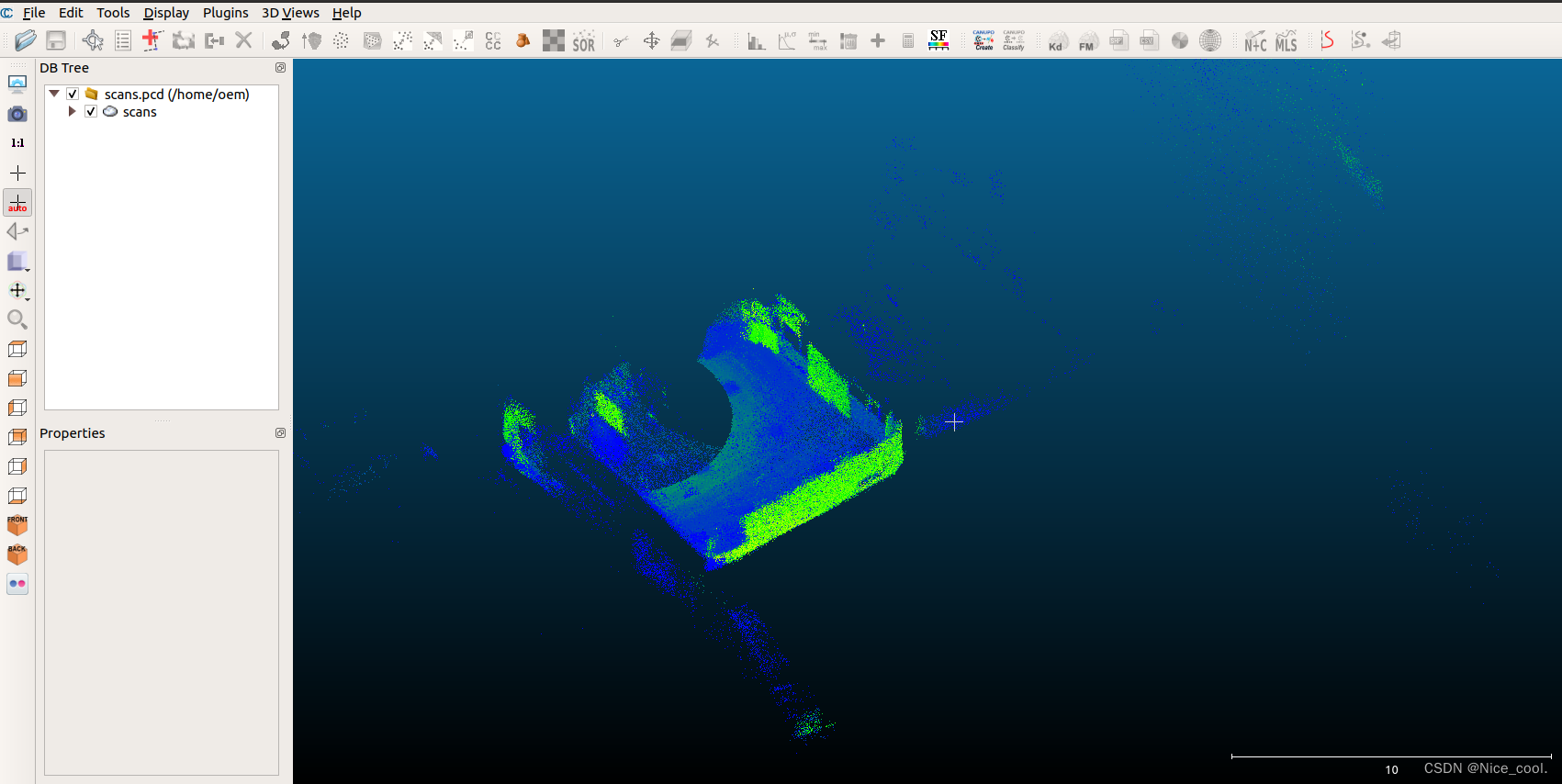
CCCorelib 点云平面特征(CloudCompare内置算法库)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 点云中存在这各种各样的几何特征,这里基于每个点的邻域协方差来获取该点的所具有的基础几何特征(如下图所示),这样的做法虽然不能很好的提取出点云中的各个部分,但却是可以作为一种数据预处理手段。 CloudCompare中也提供了计算这些特征的方法,这里我们使用其内置的算法获取我们所需要的特征值。
简析CloudCompare文件夹之间的关系
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。 CC文件间的依赖关系 ccViewer文件夹是CC单独实现的一个用于可视化小模块,依赖的库有四个,以及包含了common文件中实现的基础类。 其中依赖的链接库有四个
在cloudcompare中,已知三维坐标可视化坐标点
主要思路是:已知坐标,通过在坐标生成圆球来可视化坐标点。主要操作步骤如下 1.在cloudcompare中找到“创建基础模型” 2.创建球体 输入坐标和球体半径,x,y,z中输入已知坐标,这里以(0,0,0)为例,半径设置为2m(注意这里的单位默认是米) 3.结果 结果如图 就在坐标为(0,0,0)的位置生成了一个半径为2m的球体,实际操作中把半径设置小一点,不然会遮蔽

cloudcompare点云抽稀
点击“subsamble”,中文翻译是二次抽样: 点开之后: 红框代表抽稀方式,蓝框调整对应参数。 下面以空间抽稀讲解,蓝框中的意思就是点之间的距离,单位是米。
cloudcompare 编译安装解决无法load pcd文件问题
参考 https://github.com/CloudCompare/CloudCompare/blob/master/BUILD.md sudo apt install libqt5svg5-dev libqt5opengl5-dev qt5-default qttools5-dev qttools5-dev-tools libqt5websockets5-devgit clone --re
《PCL点云库学习VS2010(X64)》Part 18 PCL1.72(VTK6.2.0)编译CloudCompare注意点
《PCL点云库学习&VS2010(X64)》Part 18 PCL1.72(VTK6.2.0)编译CloudCompare注意点 1、CMake时注意QT_ROOT_PATH的路径; 2、CMake时注意CMake_Install_Prefix的路径,该路径是CMake生成后,打开.sln文件,编译、安装生成,所得到的应用程序exe的路径。此时最好修改一下,方便后期查找,不修改也没关系。 3
3D点云处理软件CloudCompare
文章目录 1、官网2、源码编译3、参考文献4、题外话 简介: 开源项目推荐:3D点云处理软件CloudCompare,基于Qt和OpenGL CloudCompare是一款基于GPL开源协议的3D点云处理软件,可以在Windows、MacOS和Linux上运行。我们可以通过阅读其源码来一窥3D点云处理的基本算法,也可以通过设计新的plugin来拓展本软件。 Cloud
CloudCompare 源码编译
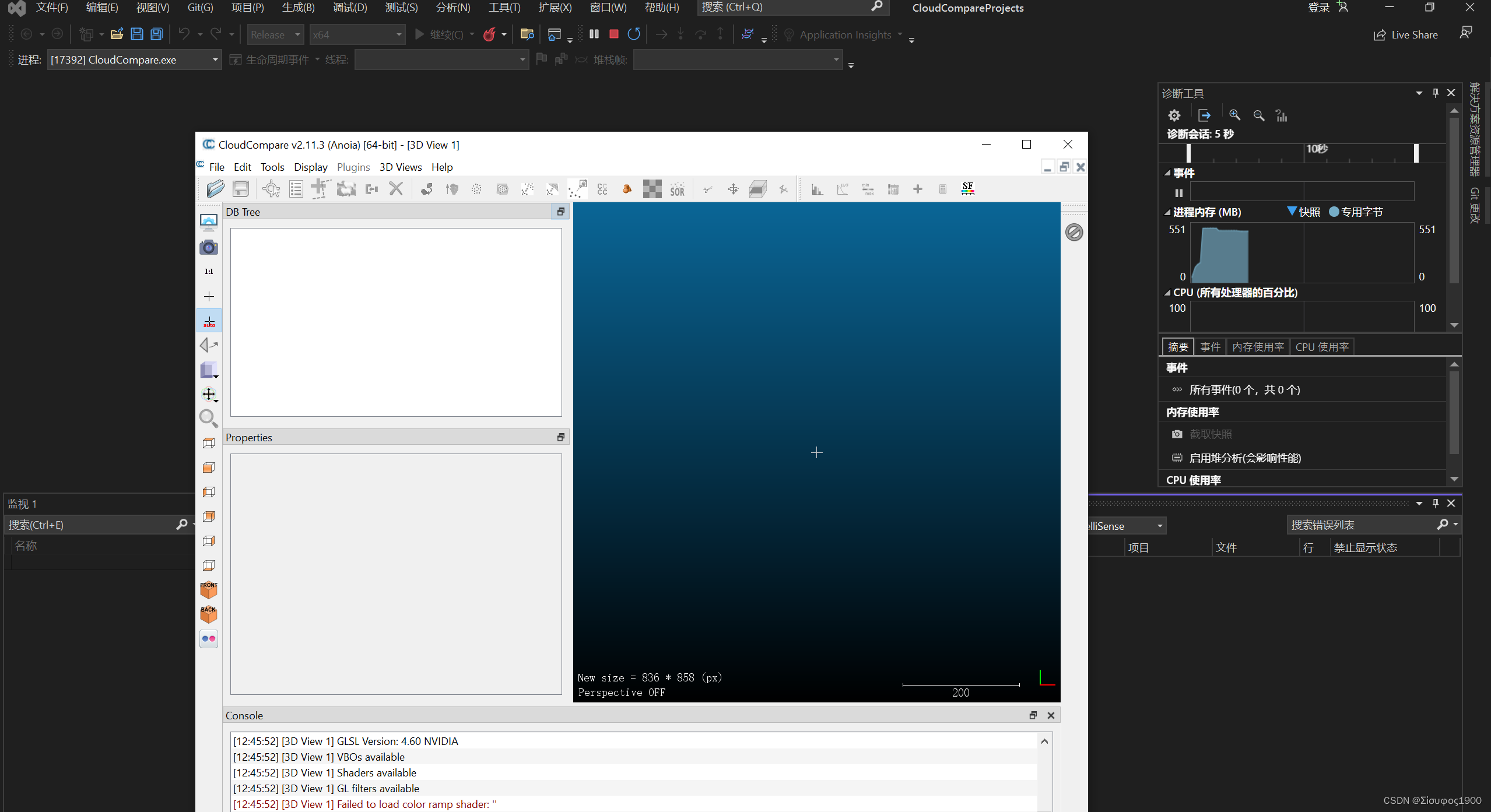
一、下载源码 二、cmake 编译 这里面有四个比较重要的地方 1、源码的位置 2、生成的位置 3、项目的位置 4、qt 的位置 三、编译 开始测试,先用那个项目做测试 没有问题 然后用build的那个打开 加入Qt 的相关库到qcc中 启动项目生成cloudcompare 启动 ok ,完成。下一片:cloudcompare的二
CloudCompare视频录制详解
CloudCompare is a 3D point cloud and mesh processing software , Open Source Project 这款开源软件的功能很强大,被很多人用来做点云的显示和处理,现在就CloudCompare(以下简称cc)的视频录制功能进行详细的操作说明。 在cc操作界面的Plugins菜单下拉子菜单中有一个qAnimationPlugin,这个
Cloudcompare 界面解读与界面修改
Cloudcompare 界面解读与界面修改 引言一、创建主窗体0. 读取全局配置1. 启动画面2. 主界面-mainWindow 二、插件初始化三、界面修改3.1 源码修改3.2 问题总结 四、参考博文 引言 Cloudcompare功能强大,界面让人看着眼花缭乱,但是我们往往只需要部分功能,故尝试对界面进行简化和修改。 一、创建主窗体 0. 读取全局配置 首先读取在上次
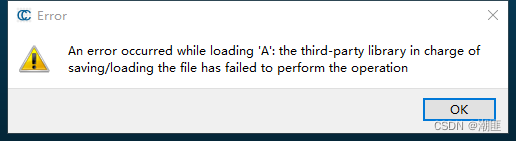
文件路径中并没有中文,但是cloudcompare打开pcd文件时还是报错,怎么办?the third-party library in charge of saving/loading the fi
cloudcompare打开pcd文件时报错,文件路径中并没有中文,文件路径: C:\Users\Administrator\Desktop\cloudcompare 文件名: A.pcd 报错消息: [09:11:39] An error occurred while loading 'A': the third-party library in charge of saving
利用CloudCompare进行点云过滤去噪(统计滤波)
使用的数据为苹果树点云,原数据共3,459,230个点,大小为105 MB,文件格式为ply。 按如下操作进行统计滤波: 由于树点云较密,所以邻近点设置了邻近点为50,执行后,结果点数变为3,139,034。 效果图:点云滤波前后对比
CloudCompare二次开发之如何设计界面ui与功能实现?
文章目录 0.引言1.创建界面ui相关文件2.添加界面ui相关文件到CloudCompare工程3.修改工程相关文件4.结果展示 0.引言 CloudCompare源代码编译成功后,即可进行二次开发,可以通过修改源码实现二次开发,二次开发基础功能见(CloudCompare如何进行二次开发?),若想要实现更多自定义功能,可以自定义界面ui,并操作CloudCompare程序处

【CloudCompare教程】011:计算点云的粗糙度(地表粗糙度)
本文基于无人机摄影测量生成的地形点云数据讲解CloudCompare计算点云粗糙度,也即地表粗糙度。 文章目录 一、点云粗糙度概述二、点云粗糙度计算 一、点云粗糙度概述 表面粗糙度(surface roughness)是指加工表面具有的较小间距和微小峰谷的不平度 。其两波峰或两波谷之间的距离(波距)很小(在1mm以下),它属于微观几何形状误差。表面粗糙度越小,则表面越