本文主要是介绍《PCL点云库学习VS2010(X64)》Part 18 PCL1.72(VTK6.2.0)编译CloudCompare注意点,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
《PCL点云库学习&VS2010(X64)》Part 18 PCL1.72(VTK6.2.0)编译CloudCompare注意点
1、CMake时注意QT_ROOT_PATH的路径;
2、CMake时注意CMake_Install_Prefix的路径,该路径是CMake生成后,打开.sln文件,编译、安装生成,所得到的应用程序exe的路径。此时最好修改一下,方便后期查找,不修改也没关系。
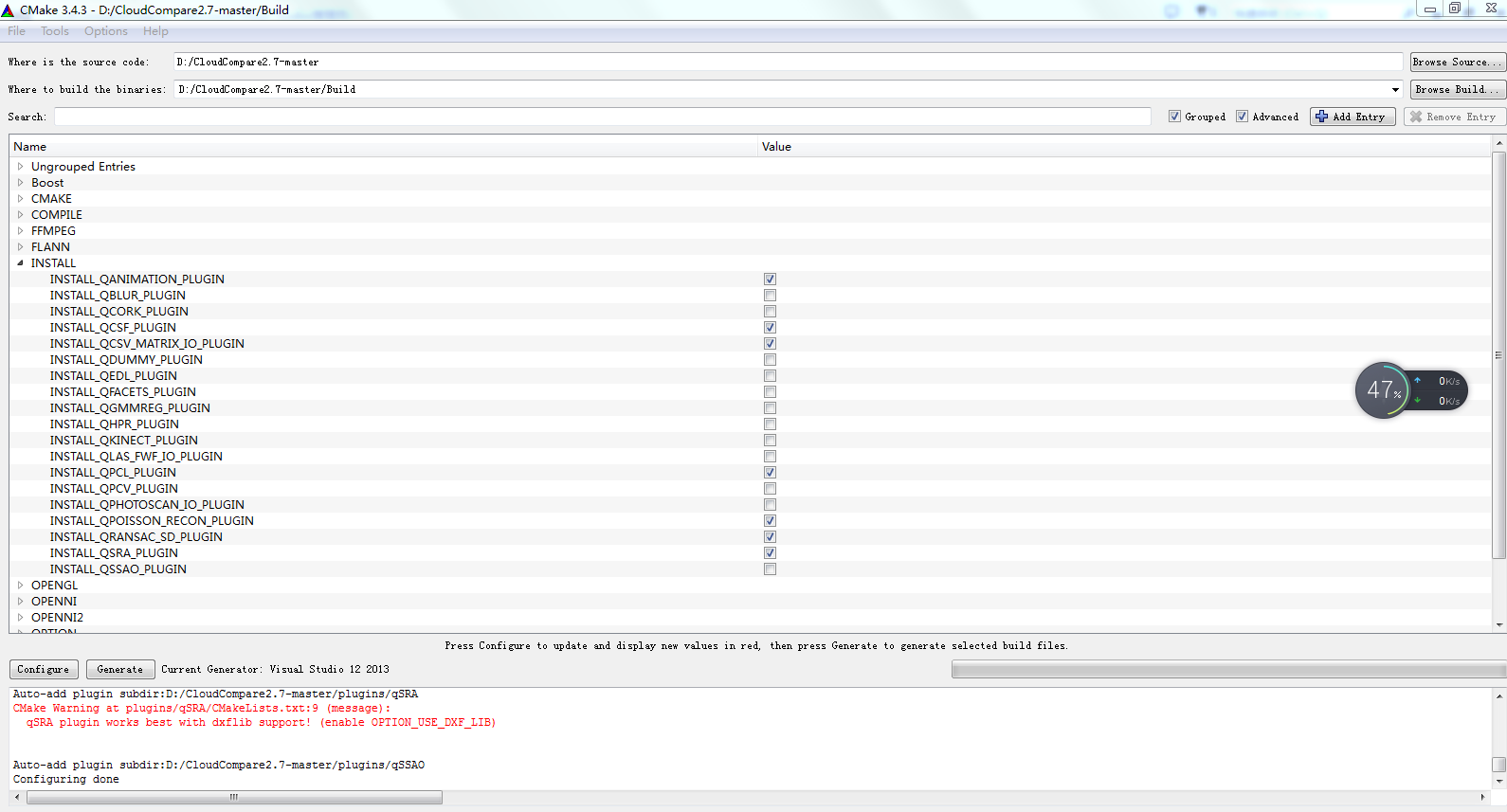
3、Install plugin时,有的库单独编译过,勾选后点configuration时可以通过,但是有的不能通过,这个就要自己看着处理了,最好是一个一个地勾选,再configuration,done(通过)的话,说明能编译,否则就要返回不要勾选该插件。
4、插件中,有个要注意:
INSTALL_POISSON_RECON_PLUGIN,这个插件勾上后会configuration失败,但是根据CMake的提示,可以看出缺少了相关文件导致的,这时要去github的cloudcompare中下载PoissonRecon_Master这个源码包,解压,将文件拷贝到\plugins\qPoissonRecon\PoissonReconLib\这个文件夹中,再重configuration,此时勾上红色部分下拉出来的多线程选项,可以加快程序处理时的速度。
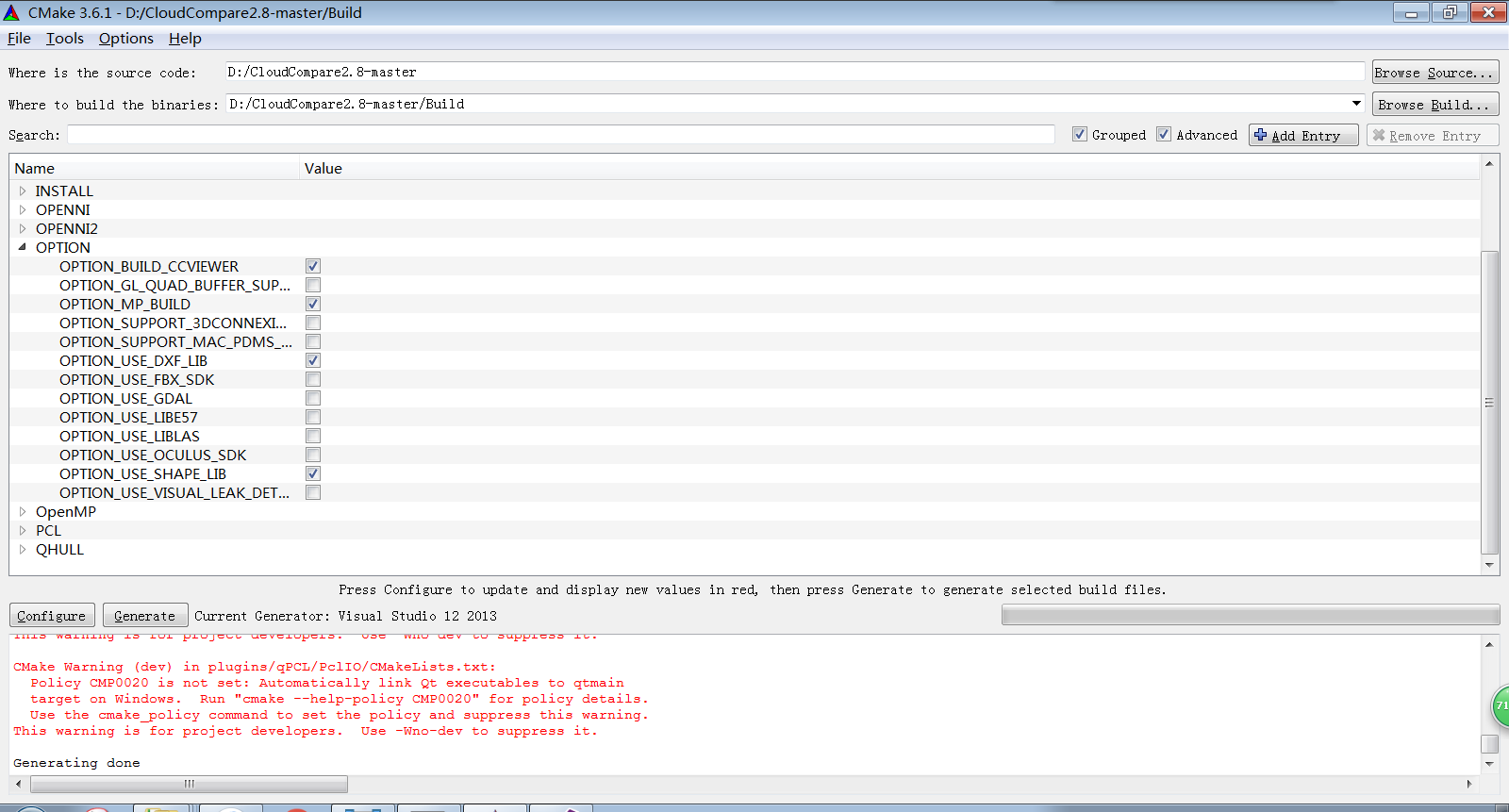
5、LIBLAS自己没编译的话就不要勾选相关的插件和选项。
6、注意环境变量的路径:我用台式机编译时,系统路径中加了PCL自带的VTK/bin路径,以及独立编译VTK后VTK_INCLUDE、VTK_LIB、VTK_BIN的路径;而我的台式机没有添加这些,所以在勾选INSTALL->INSTALL_QPCL_PLUGIN时,点击configuration会报错。
解决方法:添加PCL自带的VTK/bin路径,添加独立编译VTK后VTK_INCLUDE、VTK_LIB、VTK_BIN的路径。重新configuration,通过后点击generation。
7、CMake通过后,需要在VS中编译,这时可能会遇到找不到vld.h头文件。这时就要注意了,可能和你CMake选择编译的插件有关系,重新选择插件编译一遍就可以了。下图仅供参考:
/
补记:
1、在编译前加上CMAKE_PREFIX_PATH,并在该变量加上一些常用的路径如QT_DIR,BOOST_DIR,FLANN_DIR等,
会大大减少CMAKE无法识别的路径而不得不手动添加路径的过程;
2、2017.8.11编译最新的github上的cloudcompare2.9时,CMAKE配置和Generate都完成了,放在VS中编译时出错,找不到vld.h和另外几个成员变量,我直接将它们注释掉,编译就通过了,然后生成成功。新版本加了几个小功能,蛮实用。
这篇关于《PCL点云库学习VS2010(X64)》Part 18 PCL1.72(VTK6.2.0)编译CloudCompare注意点的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








