pcl1.72专题
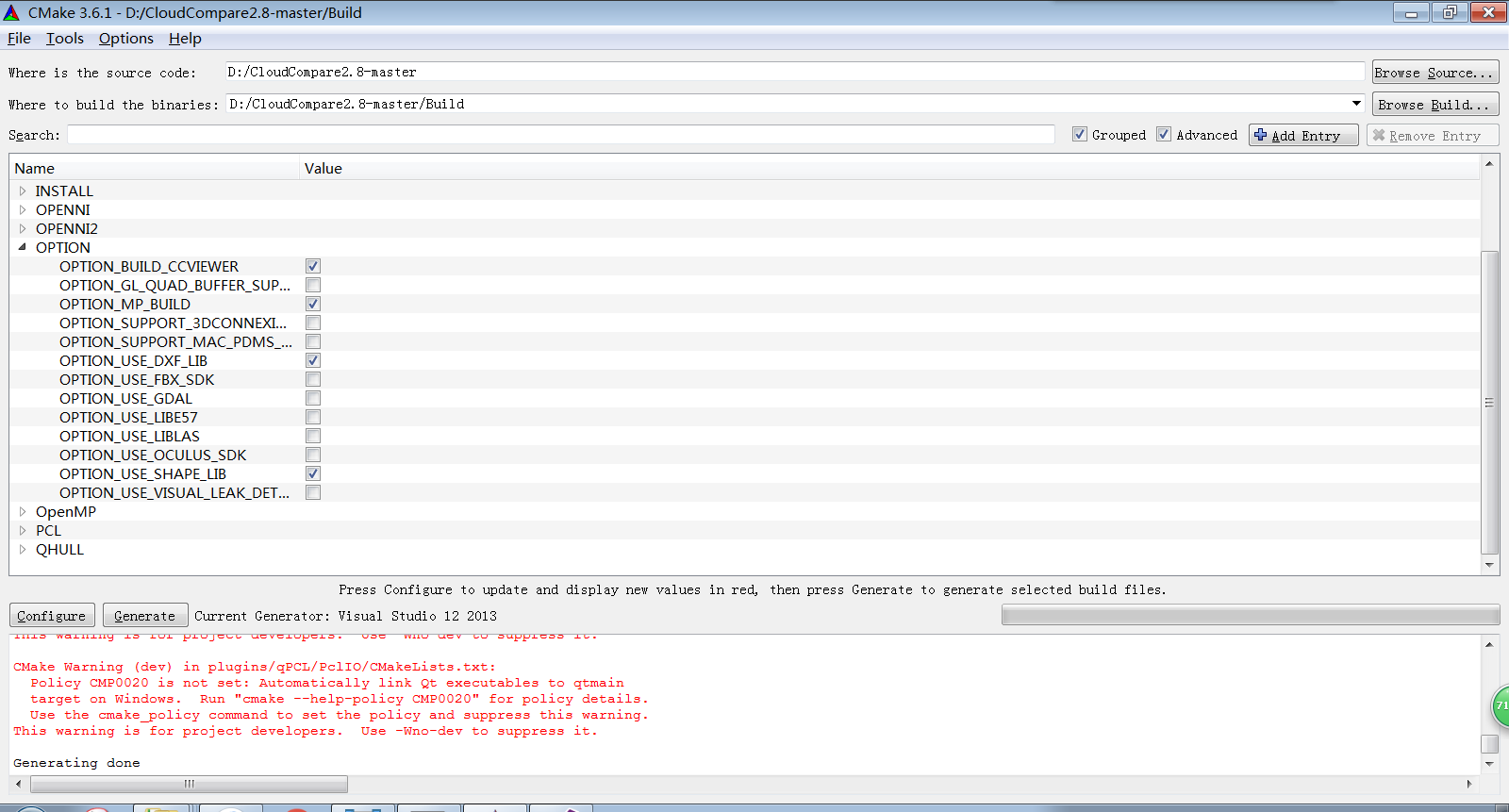
《PCL点云库学习VS2010(X64)》Part 18 PCL1.72(VTK6.2.0)编译CloudCompare注意点
《PCL点云库学习&VS2010(X64)》Part 18 PCL1.72(VTK6.2.0)编译CloudCompare注意点 1、CMake时注意QT_ROOT_PATH的路径; 2、CMake时注意CMake_Install_Prefix的路径,该路径是CMake生成后,打开.sln文件,编译、安装生成,所得到的应用程序exe的路径。此时最好修改一下,方便后期查找,不修改也没关系。 3
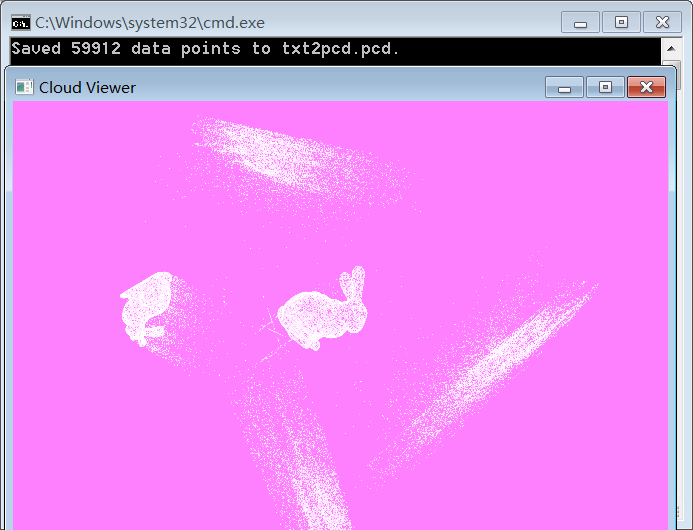
《PCL点云库学习VS2010(X64)》Part 17 PCL1.72(VTK6.2.0)数据格式转换txt2pcd
《PCL点云库学习&VS2010(X64)》Part 17 PCL1.72(VTK6.2.0)数据格式转换txt2pcd 1、txt转换成pcd点云格式 #include<iostream> #include<fstream> #include <string> #include <vector> #include <pcl/io/pcd_io.h> #include <

《PCL点云库学习VS2010(X64)》Part 16 PCL1.72(VTK6.2.0)滤波例程(2)之双边滤波
Part 16 PCL1.72(VTK6.2.0)滤波例程(2)之双边滤波 1、BilteralFilter.cpp: kdTree只能使用pcl/search/kdtree.h里的,pcl/kdtree/kdtree_flann.h里的在setSearchMethod()函数中会出现报错。这个问题在查找源码后得到了解决: 1)对于散乱无序点云使用pcl/kdtree/kdtre
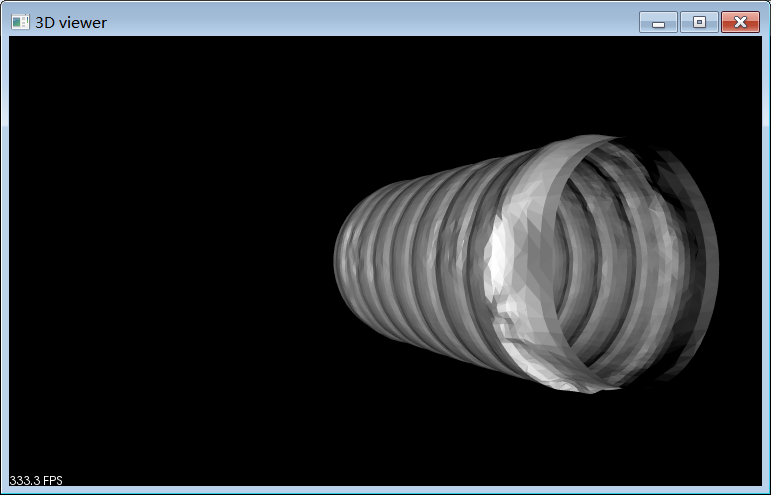
《PCL点云库学习VS2010(X64)》Part 15 PCL1.72(VTK6.2.0)三角网格化(2)之泊松重构
《PCL点云库学习&VS2010(X64)》Part 15 PCL1.72(VTK6.2.0)三角网格化(2)之泊松重构 1、cpp //点的类型的头文件#include <pcl/point_types.h>//点云文件IO(pcd文件和ply文件)#include <pcl/io/pcd_io.h>#include <pcl/io/ply_io.h>//kd树#includ
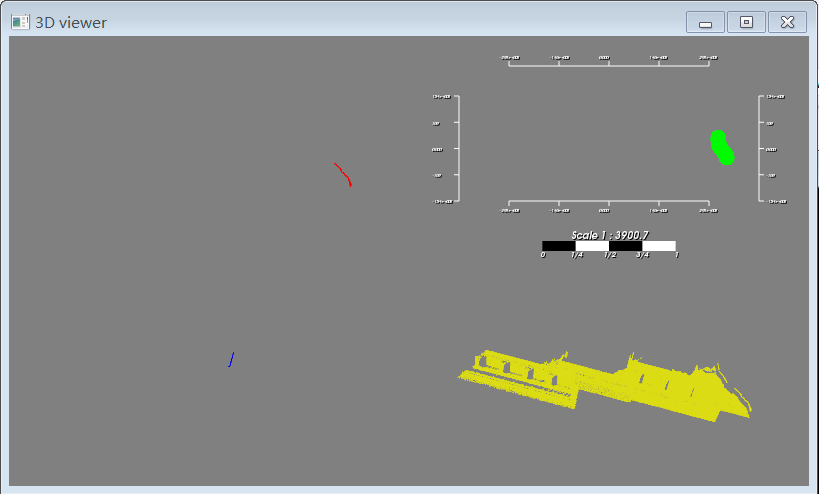
《PCL点云库学习VS2010(X64)》Part 14 PCL1.72(VTK6.2.0)点云分割(Point Cloud Segmentation)
Part 14 PCL1.72(VTK6.2.0)点云分割(Point Cloud Segmentation) 1、Plane Model Segmentation cpp: #include <iostream>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>#include <pcl/visualization/