点云库专题

最新:windows下安装pcl点云库
📚博客主页:knighthood2001 ✨公众号:认知up吧 (目前正在带领大家一起提升认知,感兴趣可以来围观一下) 🎃知识星球:【认知up吧|成长|副业】介绍 ❤️如遇文章付费,可先看看我公众号中是否发布免费文章❤️ 🙏笔者水平有限,欢迎各位大佬指点,相互学习进步! 文章目录 下载文件安装pcl配置环境变量配置vs中的环境测试一下总结 最近安装点云pcl遇到了一

点云库(PCL)学习——Advanced Usage(二)
1.写一个新的PCL class 为了说明代码转换过程,我们选择了以下示例:对给定输入点云的强度数据应用双边过滤器,并将结果保存到磁盘。 #include <pcl/point_types.h>#include <pcl/io/pcd_io.h>#include <pcl/kdtree/kdtree_flann.h>typedef pcl::PointXYZI PointT;floatG (

点云库(PCL)学习——Advanced Usage(一)
添加自定义的PointT类型 这篇文档只适用于PCL0.x和1.x版本。 PCL提供了各种预定义的点类型,从XYZ数据的SSE对齐结构到更复杂的n维直方图表示,如PFH(点特征直方图)。这些类型应该足够支持所有的在PCL中实现的算法以及方法。然而,仍然存在一些情况需要使用者自行定义新的类型。 PS:SSE对齐结构意思应该是说定义结构体时,X、Y、Z的数据类型都是一样的——译者注 1.

点云库(PCL)学习——I/O
1.PCD(Point Cloud Data)文件格式 1.PCD并不是第一个支持三维点云的格式。特别是计算机图形学和计算几何界,已经创造了许多格式来描述使用激光扫描仪获得的任意多边形和点云。比如:PLY,STL,OBJ,X3D等。在当今的传感器技术以及算法被发明之前,这些格式就因为不同的目的在不同的时间相继被创造出来,它们也存在着多多少少的缺陷。 2.文件格式头文件:每个PCD文件都包含了一
点云库(PCL)学习——基本结构
PCL1.x版本中的数据类型为: pcl:PointCloud<pcl::PointCloud> PointCloud 是C++ 的一个类(class),包含了以下数据字段: pcl:width<pcl::PointCloud::width>(int) 以点数为单位指定点云数据集的宽度。宽度有两种含义: 可以为无组织数据集指定云中的点的总数(等于点中元素的数量–见下文);可以指定有组织点云数据集

点云库(PCL)学习——overview
overview PCL是由几个模块库构成的: Filters, Features, Keypoints, Registration, KdTree, Octree, Segmentation, Sample Consensus, Surface, Range Image, I/O, Visualization, Common, Search. Filters 背景:下图给出了噪声消除的示例。

Ubuntu20.04纯命令配置PCL(点云库)
Ubuntu20.04纯命令配置PCL(点云库) 最近在学习点云库(PCL)的使用,第一步就是在自己的电脑安装配置PCL。 首先,对于ubuntu 16.04以上版本,可以直接使用命令进行安装,新建好一个文件夹,进入终端,输入以下命令: sudo apt install libpcl-dev 在安装过程中可能会遇到如下错误, 不用担心,系统已经提示了解决方法,我个人按照系统的提示输入如下
Ubuntu20.04纯命令配置PCL(点云库)
Ubuntu20.04纯命令配置PCL(点云库) 最近在学习点云库(PCL)的使用,第一步就是在自己的电脑安装配置PCL。 首先,对于ubuntu 16.04以上版本,可以直接使用命令进行安装,新建好一个文件夹,进入终端,输入以下命令: sudo apt install libpcl-dev 在安装过程中可能会遇到如下错误, 不用担心,系统已经提示了解决方法,我个人按照系统的提示输入如下
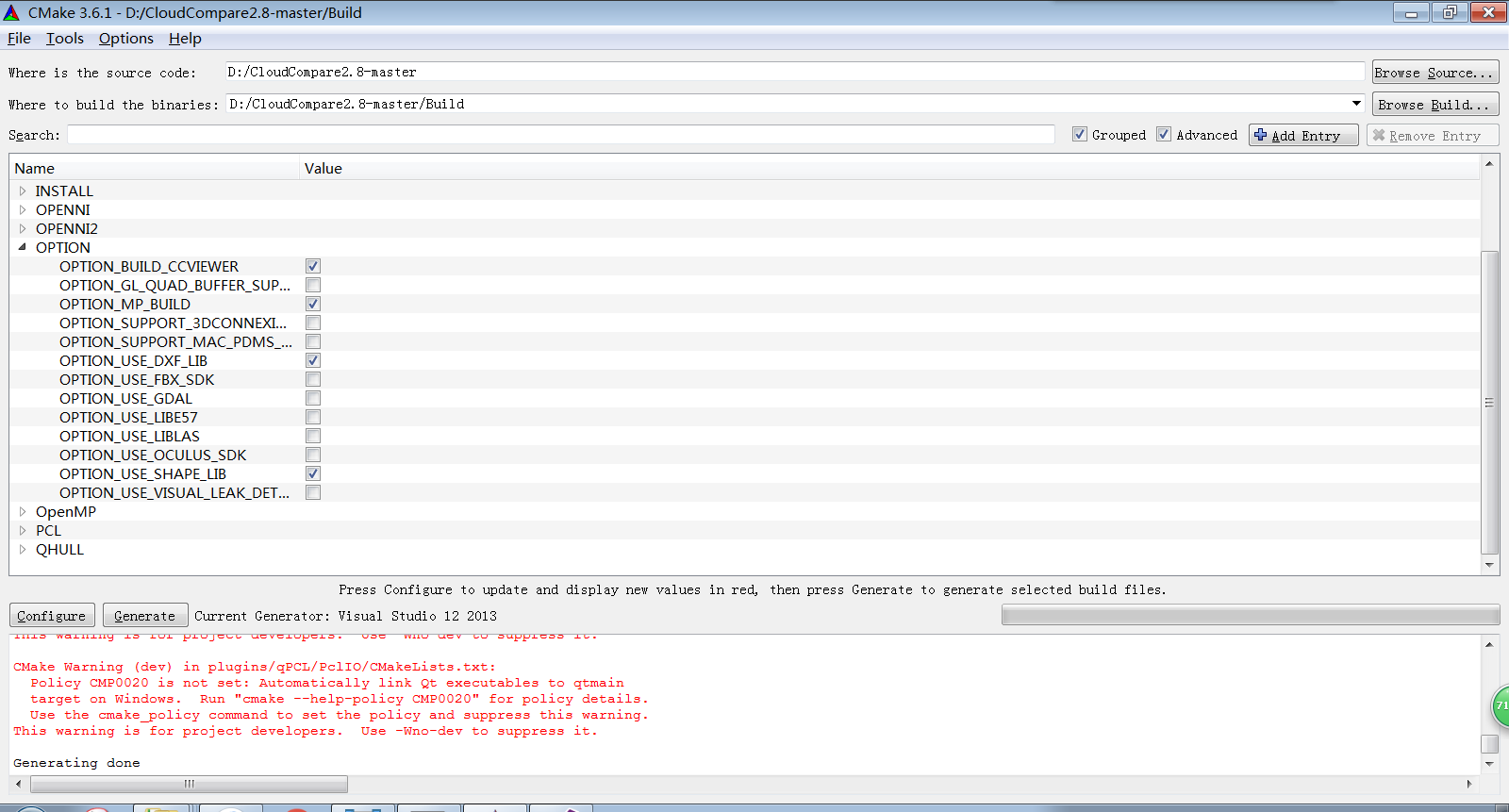
《PCL点云库学习VS2010(X64)》Part 18 PCL1.72(VTK6.2.0)编译CloudCompare注意点
《PCL点云库学习&VS2010(X64)》Part 18 PCL1.72(VTK6.2.0)编译CloudCompare注意点 1、CMake时注意QT_ROOT_PATH的路径; 2、CMake时注意CMake_Install_Prefix的路径,该路径是CMake生成后,打开.sln文件,编译、安装生成,所得到的应用程序exe的路径。此时最好修改一下,方便后期查找,不修改也没关系。 3
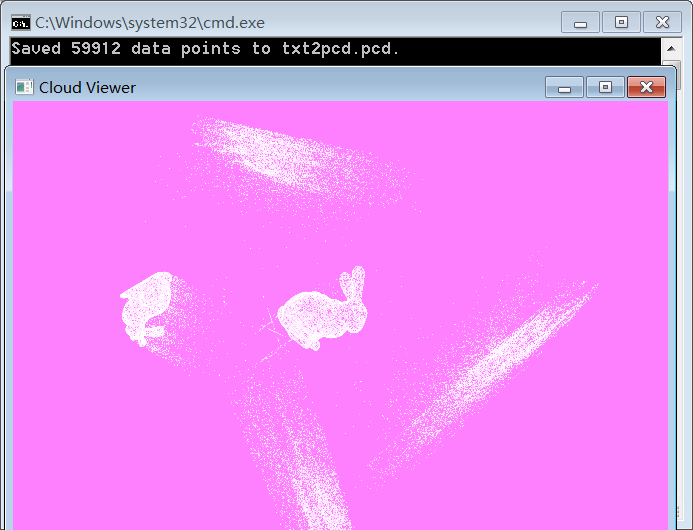
《PCL点云库学习VS2010(X64)》Part 17 PCL1.72(VTK6.2.0)数据格式转换txt2pcd
《PCL点云库学习&VS2010(X64)》Part 17 PCL1.72(VTK6.2.0)数据格式转换txt2pcd 1、txt转换成pcd点云格式 #include<iostream> #include<fstream> #include <string> #include <vector> #include <pcl/io/pcd_io.h> #include <
《PCL点云库学习VS2010(X64)》Part 16 PCL1.72(VTK6.2.0)滤波例程(2)之双边滤波
Part 16 PCL1.72(VTK6.2.0)滤波例程(2)之双边滤波 1、BilteralFilter.cpp: kdTree只能使用pcl/search/kdtree.h里的,pcl/kdtree/kdtree_flann.h里的在setSearchMethod()函数中会出现报错。这个问题在查找源码后得到了解决: 1)对于散乱无序点云使用pcl/kdtree/kdtre
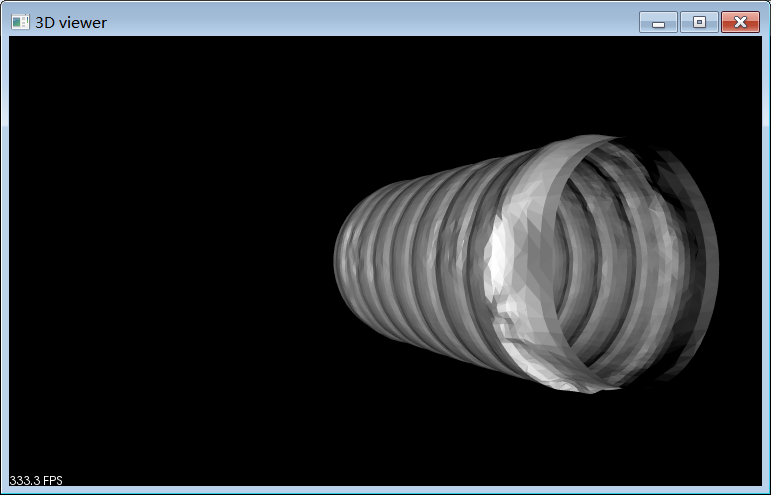
《PCL点云库学习VS2010(X64)》Part 15 PCL1.72(VTK6.2.0)三角网格化(2)之泊松重构
《PCL点云库学习&VS2010(X64)》Part 15 PCL1.72(VTK6.2.0)三角网格化(2)之泊松重构 1、cpp //点的类型的头文件#include <pcl/point_types.h>//点云文件IO(pcd文件和ply文件)#include <pcl/io/pcd_io.h>#include <pcl/io/ply_io.h>//kd树#includ
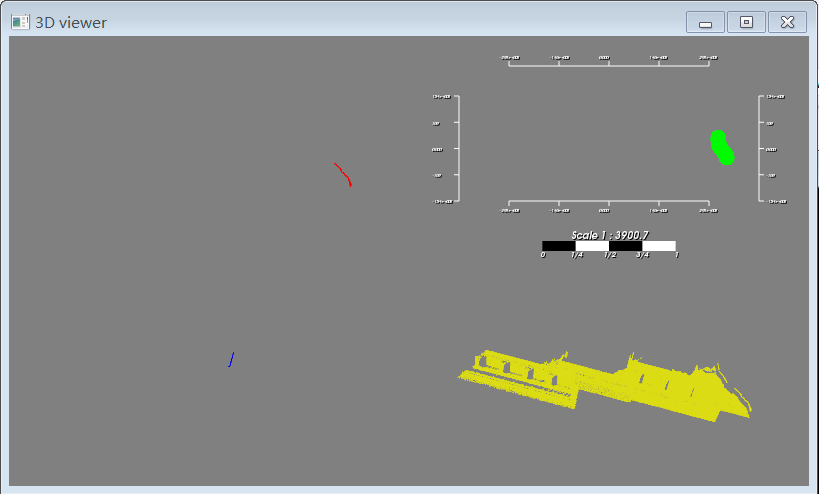
《PCL点云库学习VS2010(X64)》Part 14 PCL1.72(VTK6.2.0)点云分割(Point Cloud Segmentation)
Part 14 PCL1.72(VTK6.2.0)点云分割(Point Cloud Segmentation) 1、Plane Model Segmentation cpp: #include <iostream>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>#include <pcl/visualization/
《PCL点云库学习VS2010(X64)》Part 23 快速双边滤波算法之三线插值
《PCL点云库学习&VS2010(X64)》Part 23 快速双边滤波算法之三线插值 一、源代码 快速双边滤波算法的精华部分在3D网格分配、控制网格延伸范围、下采样和上采样线性插值三个主要部分。 核心代码: #ifndef PCL_FILTERS_IMPL_FAST_BILATERAL_HPP_#define PCL_FILTERS_IMPL_FAST_BILA
《PCL点云库学习VS2010(X64)》Part 22 激光雷达点云数据处理相关算法库收集
《PCL点云库学习&VS2010(X64)》Part 22 激光雷达点云数据处理相关算法库收集 原博文来自kui_ 1.CGAL,Computational Geometry Algorithms Library,计算几何算法库,设计目标是,以C++库的形式,提供方便,高效,可靠的几何算法。CGAL可用于各种需要几何计算的领域,如计算机图形学,科学可视化,计算机辅助设计和建模,地理信息

《PCL点云库学习VS2010(X64)》Part 21 VTK6.2+VS2013 利用PCL读取ply格式网格曲面
《PCL点云库学习&VS2010(X64)》Part 21 VTK6.2+VS2013 利用PCL读取ply格式网格曲面 写这个主要是在三维网格重构后用的,利用vtk显示点云数据,对ply格式是有要求的,有的ply格式纯粹就是点云数据,也可以理解为是pcd格式的电云数据。 但是在使用Crust算法生成曲面后,在Meshlab中渲染出来的效果才能出现曲面,在Cl
ubuntu18.04 安装pcl点云库(亲测有效)
一、pcl库简介 PCL(Point Cloud Library)是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。支持多种操作系统平台,可在Windows、Linux、Android、Mac OS X、部分嵌入式实时系统上运行。如

点云库PCL学习:提取最小包围盒(AABB、OBB)
提取最小包围盒(AABB、OBB) 最小包围盒介绍AABB、OBB包围盒的提取提取结果 最小包围盒介绍 包围盒也叫外接最小矩形,是一种求解离散点集最优包围空间的算法,基本思想是用体积稍大且特性简单的几何体(称为包围盒)来近似地代替复杂的几何对象。 常见的包围盒算法有AABB包围盒、包围球、方向包围盒OBB以及固定方向凸包FDH。碰撞检测问题在虚拟现实、计算机辅助设计与制造、游

Ubuntu14.04安装PCL点云库(Ubuntu14.04已测试)
说在前面,本文在本人提供的Ubuntu14.04镜像下测试通过,不保证其他镜像的兼容问题 #安装 首先,参考官网预安装教程 sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pclsudo apt-get updatesudo apt-get install libpcl-all 然后进行git git clo