本文主要是介绍ubuntu18.04 安装pcl点云库(亲测有效),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、pcl库简介
PCL(Point Cloud Library)是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。支持多种操作系统平台,可在Windows、Linux、Android、Mac OS X、部分嵌入式实时系统上运行。如果说OpenCV是2D信息获取与处理的结晶,那么PCL就在3D信息获取与处理上具有同等地位,PCL是BSD授权方式,可以免费进行商业和学术应用。
PCL起初是ROS(Robot Operating System)下由来自于慕尼黑工业大学和斯坦福大学Radu博士等人维护和开发的开源项目,主要应用于机器人研究应用领域,随着各个算法模块的积累,于2011年独立出来,正式与全球3D信息获取、处理的同行一起,组建了强大的开发维护团队,以多所知名大学、研究所和相关硬件、软件公司为主。发展非常迅速,不断有新的研究机构等加入,在Willow Garage, NVidia, Google (GSOC 2011), Toyota, Trimble, Urban Robotics, Honda Research Institute等多个全球知名公司的资金支持下,不断提出新的开发计划,代码更新非常活跃,在不到一年的时间内从1.0版本已经发布到1.7.0版本。
二、PCL的结构和内容
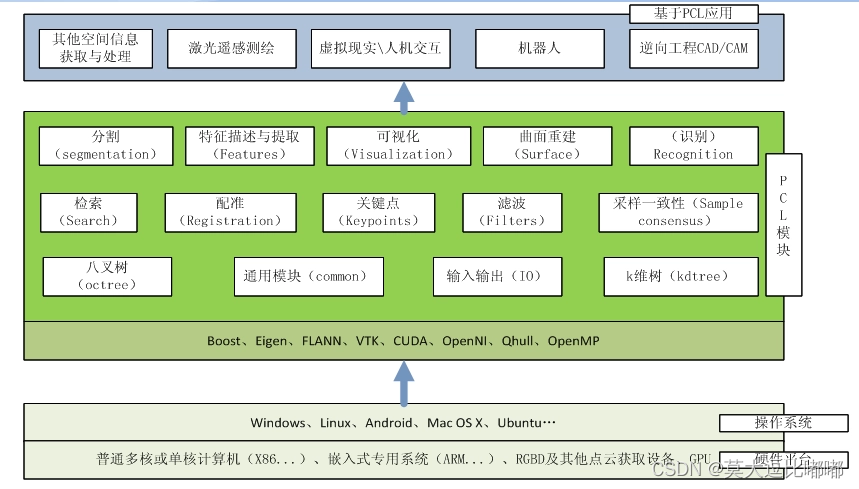
如《PCL架构图》所示,对于3D点云处理来说,PCL完全是一个的模块化的现代C++模板库。其基于以下第三方库:Boost、Eigen、FLANN、VTK、CUDA、OpenNI、Qhull,实现点云相关的获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。
PCL利用OpenMP、GPU、CUDA等先进高性能计算技术,通过并行化提高程序实时性。K近邻搜索操作的构架是基于FLANN (Fast Library for Approximate Nearest Neighbors)所实现的,速度也是技术中最快的。PCL中的所有模块和算法都是通过Boost共享指针来传送数据的,因而避免了多次复制系统中已存在的数据的需要,从0.6版本开始,PCL就已经被移入到Windows,MacOS和Linux系统,并且在Android系统也已经开始投入使用,这使得PCL的应用容易移植与多方发布。
从算法的角度,PCL是指纳入了多种操作点云数据的三维处理算法,其中包括:过滤,特征估计,表面重建,模型拟合和分割,定位搜索等。每一套算法都是通过基类进行划分的,试图把贯穿整个流水线处理技术的所有常见功能整合在一起,从而保持了整个算法实现过程中的紧凑和结构清晰,提高代码的重用性、简洁可读。在PCL中一个处理管道的基本接口程序是:
- 创建处理对象:(例如过滤、特征估计、分割等);
- 使用setInputCloud通过输入点云数据,处理模块;
- 设置算法相关参数;
- 调用计算(或过滤、分割等)得到输出。
为了进一步简化和开发,PCL被分成一系列较小的代码库,使其模块化,以便能够单独编译使用提高可配置性,特别适用于嵌入式处理中:
- libpcl filters:如采样、去除离群点、特征提取、拟合估计等数据实现过滤器;
- libpcl features:实现多种三维特征,如曲面法线、曲率、边界点估计、矩不变量、主曲率,PFH和FPFH特征,旋转图像、积分图像,NARF描述子,RIFT,相对标准偏差,数据强度的筛选等等;
- libpcl I/O:实现数据的输入和输出操作,例如点云数据文件(PCD)的读写;
- libpcl segmentation:实现聚类提取,如通过采样一致性方法对一系列参数模型(如平面、柱面、球面、直线等)进行模型拟合点云分割提取,提取多边形棱镜内部点云等等;
- libpcl surface:实现表面重建技术,如网格重建、凸包重建、移动最小二乘法平滑等;
- libpcl register:实现点云配准方法,如ICP等;
- libpclkeypoints:实现不同的关键点的提取方法,这可以用来作为预处理步骤,决定在哪儿提取特征描述符;
- libpcl range :实现支持不同点云数据集生成的范围图像。
三、 PCL编译安装
1、安装基本环境
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev libusb-1.0-0-dev libusb-dev libudev-dev mpi-default-dev openmpi-bin openmpi-common libflann1.9 libflann-dev libeigen3-dev libboost-all-dev libvtk7-jni libvtk7-java libvtk7-dev libvtk7.1-qt libvtk7.1 libvtk7-qt-dev libqhull* libgtest-dev freeglut3-dev pkg-config libxmu-dev libxi-dev mono-complete openjdk-8-jdk openjdk-8-jre -y2、安装cmake
直接使用apt安装cmake,版本太低。
在cmake官网下载cmake压缩包,然后解压缩,最后将cmake/bin/文件夹中的指令软链接到/usr/bin即可。
https://cmake.org/download/![]() https://cmake.org/download/
https://cmake.org/download/
3、安装VTK
在VTK官网下载VTK最新版就行。
Download | VTK![]() https://www.vtk.org/download/ 解压缩VTK,在VTK目录下创建build文件夹,进入build文件夹下,执行以下命令编译。
https://www.vtk.org/download/ 解压缩VTK,在VTK目录下创建build文件夹,进入build文件夹下,执行以下命令编译。
cmake ..
sudo make
sudo make install
4、安装PCL
GitHub - PointCloudLibrary/pcl: Point Cloud Library (PCL)![]() https://github.com/PointCloudLibrary/pcl.git 将PCL源代码git clone到本地,进入文件夹,执行以下命令编译安装PCL:
https://github.com/PointCloudLibrary/pcl.git 将PCL源代码git clone到本地,进入文件夹,执行以下命令编译安装PCL:
cd pcl
mkdir build
cd build
cmake ..
make -j
sudo make -j4 install四、参考链接
- PCL(点云库)_百度百科
- Ubuntu18.04安装PCL,亲测有效_陈小媳妇儿的博客-CSDN博客_ubuntu18.04 安装pcl
- ubuntu18.04下pcl库的安装(绕过那些巨坑!)_CLM_Only的博客-CSDN博客
这篇关于ubuntu18.04 安装pcl点云库(亲测有效)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









