carla专题

Carla自动驾驶仿真十:Carlaviz三维可视化平台搭建
文章目录 前言一、环境准备1、docker安装2、websocket-client安装3、carlaviz代码下载 二、carlaviz使用1、打开carla客户端2、输入启动命令3、进入carlaviz4、修改manual_control.py脚本5、运行manual_control.py脚本6、运行carlaviz官方脚本(推荐) 前言 Carlaviz是一个开源的

CARLA (I)--Ubuntu20.04 服务器安装 CARLA_0.9.13服务端和客户端详细步骤
目录 0. 说明0.1 应用场景:0.2 本文动机: 1. 准备工作2. 安装 CARLA 服务端软件【远程服务器】3. 安装 CARLA 客户端【远程服务器】3.1 .egg 文件安装:3.2 .whl 文件安装:3.3 从Pypi下载Python package 4. 运行服务端程序5. 运行客户端程序【远程服务器】6. 另外一种应用模式:服务端程序【远程服务器】<--->客户端程序【本
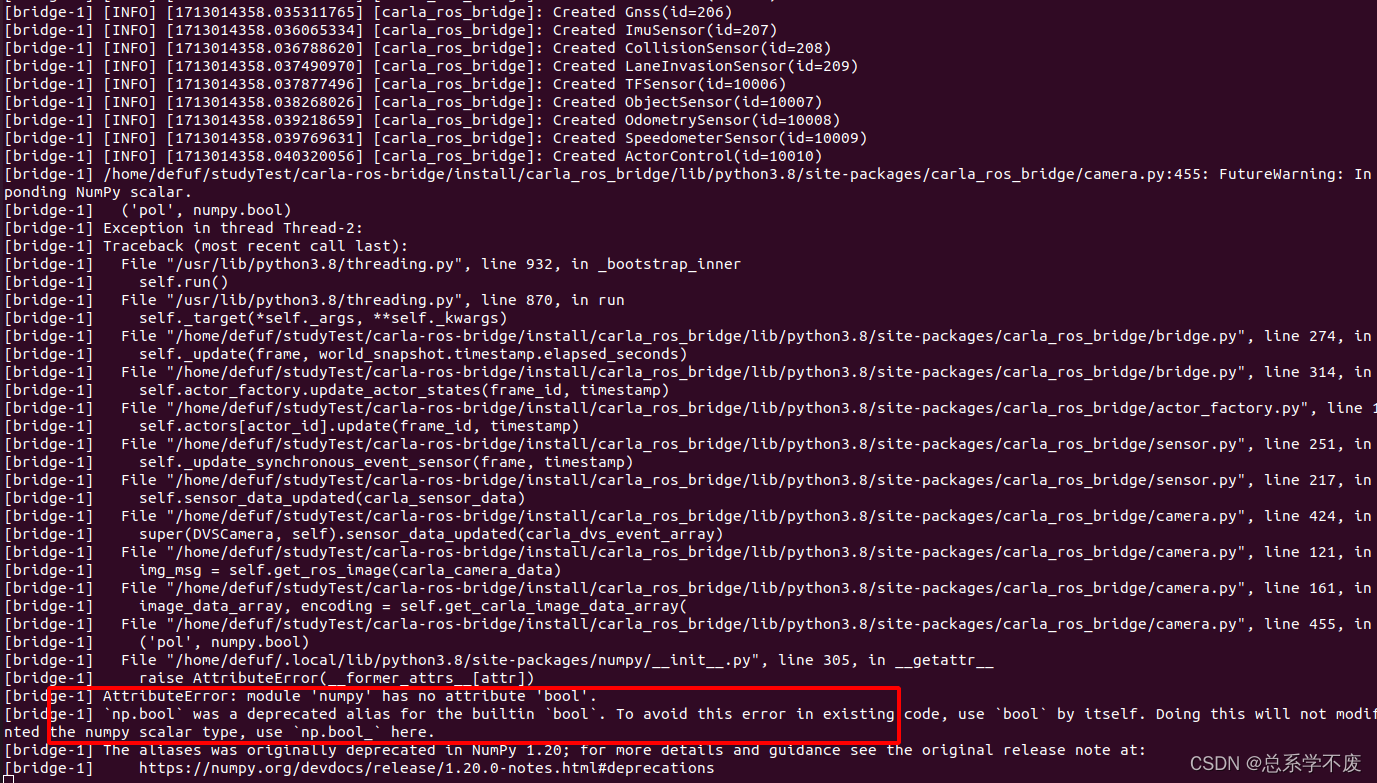
【避坑/个人总结】CARLA仿真遇到问题总结1
问题描述 执行以下命令时: ./CarlaUE4.sh// 以及ros2 launch carla_shenlan_bridge_ego_vis carla_bridge_ego_vehilce.launch.py 出现以下的问题: 解决方法: 更新numpy库到1.23的版本
Ubuntu 安装 Carla仿真环境
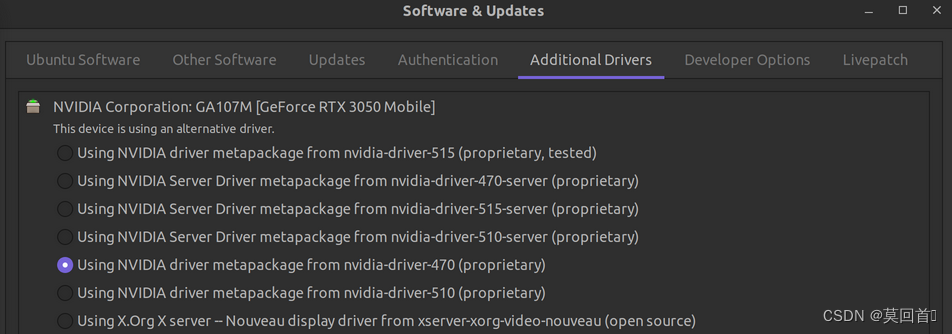
1、系统要求 Ubuntu 16.04/18.04/20.04 CARLA 为 16.04 之前的 Ubuntu 版本提供支持。然而,Unreal Engine需要合适的编译器才能正常工作。 CARLA 服务器至少需要 6 GB GPU,但建议使用 8 GB。 2、安装NIVDIA驱动 BISO设置 开机F12,进入BIOS。 设置安全启动为关闭 disable模式 英伟达官
carla-ros跨机通信(ros、carla_ros_bridge安装,开发板通信)
carla-ros通信 一、ros、carla_ros_bridge安装 1.ros安装步骤 ros的版本选择要与ubnutu系统版本对应,建议使用ros2(通信更便捷) ROS与操作系统版本对应关系:ROS与操作系统版本对应关系_ros版本与ubuntu对应版本_万俟淋曦的博客-CSDN博客 (1)配置系统软件源 打开“软件和更新”,进入到“Ubuntu软件“页面,允许universe

Carla自动驾驶仿真九:车辆变道路径规划
文章目录 前言一、关键函数二、完整代码效果 前言 本文介绍一种在carla中比较简单的变道路径规划方法,主要核心是调用carla的GlobalRoutePlanner模块和PID控制模块实现变道,大体的框架如下图所示。 一、关键函数 1、get_spawn_point(),该函数根据指定road和lane获得waypoint(这里之所以这么用是为了选择一条比较

Carla自动驾驶仿真八:两种查找CARLA地图坐标点的方法
文章目录 前言一、通过Spectator获取坐标二、通过道路ID获取坐标总结 前言 CARLA没有直接的方法给使用者查找地图坐标点来生成车辆,这里推荐两种实用的方法在特定的地方生成车辆。 一、通过Spectator获取坐标 1、Spectator(观察者),我们通过键盘的W A S D按键以及鼠标的左键可以移动Carla Client的画面,实际移动的是Spectat

CARLA 笔记(4th)— 基础模块使用(client、world、Actor 与 Blueprint、搭建Sensor、Camera、Lidar 构建、观察者放置)
3. 搭建传感器 Sensor Sensor 是一种特殊的 Actor,它的蓝图也是可以在蓝图库里边找到的,目前 Carla 已经支持了很多传感器,比如 摄像头: Depth, RGB , Semantic segmentation探测器: Collision , Lane invasion , Obstacle其他: GNSS , IMU , LIDAR raycast , Radar 传

OpenScenario场景仿真结构思维导图, OpenScenario是 自动驾驶仿真软件carla推出来的场景仿真标准
OpenScenario场景仿真结构思维导图, OpenScenario是 自动驾驶仿真软件carla推出来的场景仿真标准,可配合carla一起完成整套自动驾驶的闭环仿真过程,将场景搭建变成可编程化的方式。 可以模拟出自动驾驶真实环境中出现的各种各样的路况环境,例如:被动超车场景、跟车变道场景、换道场景等等。 该思维导图是我们两位自动驾驶仿真工程师耗时一个多月整理出来的。 倘若您具备Opensce
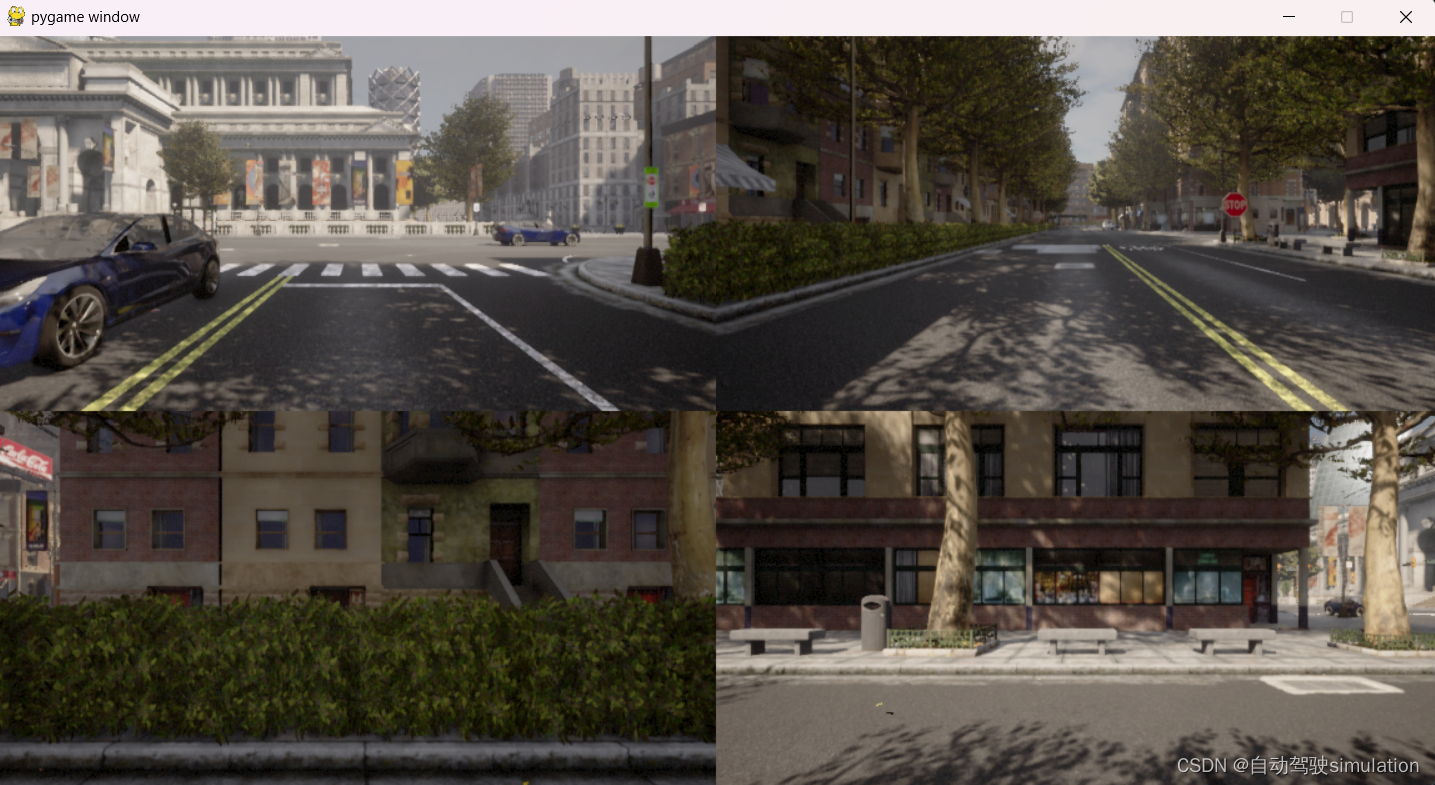
Carla自动驾驶仿真六:pygame多个车辆摄像头画面拼接
此文章主要介绍carla前后左右摄像头画面拼接到pygame上 文章目录 前言一、要点分析二、完整代码三、拼接效果四、总结 前言 1、使用carla做仿真测试或者开发时,如果能够将车辆周边的画面拼接并渲染,可以直观地查看周围地环境,便于调试。本文将介绍使用carla中的camera传感器监控自车周边的画面,并通过pygame可视化。 一、要点分析 1、如果摄像头的

Carla交通管理器
概念 Traffic Manager(TM)是在模拟中以自动驾驶模式控制车辆的模块。它的目标是用真实的城市交通条件填充模拟。用户可以自定义一些行为,例如,设置特定的学习环境。 交通管理器的运行逻辑大致为: 存储和更新当前模拟世界中的状态 Agent Lifecycle & State Management (ALSM):从Carla中获取车辆及行人信息,并保持更新。 vehicle re
Carla简单入门-3 传感器
Carla简单入门-3 传感器 本文写于2023年7月,文中所展示的版本为Ubuntu20.04以及Carla0.9.14,不同版本可能有一定的不同,欢迎各位伙伴们把遇到的问题和解决办法与其他人分享。 上篇文档中,我们详细了解了Carla中的同步与异步的区别,适用环境以及应用上的细节,在同步模式下解决了我们摄像头卡顿丢帧的问题。现在我们可以根据我们的需求尽情添加摄像头来读取信息而不用担心丢失信
windows编译carla报错:Make sure it is available on your Windows “py“.
具体报错信息: -[BuildPythonAPI]: [Batch params]: --py3INFO: Could not find files for the given pattern(s).-[BuildPythonAPI]: [ERROR] An error ocurred while executing the py.-[BuildPythonAPI]: [ERROR] Pos
学校项目培训之Carla仿真平台之安装Carla
官网:http://carla.org/ 写在前面 由于安装都写了很多东西,所以我单独将安装弄出来记录一下。 如果你在安装9.12版本的时候遇到了很多问题,你可以考虑以下几点: - 楼梯可能不太行,需要更换,这是我实践得到的 - 你说他为什么有9.14版本呢,所以最好换到9.14版本,只从下面讲到的Carla安装的地方开始不一样。 一、安装Carla(快速版) 1.

在CARLA中获取CARLA自动生成的全局路径规划
CARLA生成全局路径规划的代码在 carla/PythonAPI/carla/agents/navigation 在自己的carla客户端py文件中 from agents.navigation.basic_agent import BasicAgent # pylint: disable=import-error 如果是pycharm开发,要在pycharm的Settings -
CARLA视觉传感器系列实现原理分析
前言 欢迎大家在本文章积极评论,指出文章中没有解释清楚的、希望详细了解的地方。评论方式:请添加深信科创小助手的微信号(ID:synkrotron1),备注「CARLA」即可加入深信科创CARLA交流群,在群里进行交流与探讨。 研究出发点 得益于Unreal Engine,自动驾驶测试仿真工具CARLA在图像渲染方面有着远超其他仿真器的画面质量。最明显的就是CARLA中一系列的视觉传感器(Ca

在CARLA中手动开车,添加双目相机stereo camera,激光雷达Lidar
CARLA的使用逻辑: 首先创建客户端 设置如果2秒没有从服务器返回任何内容,则终止 client = carla.Client("127.0.0.1", 2000)client.set_timeout(2.0) 从客户端中get world world = client.get_world() 设置setting并应用 这里使用固定时间步长的异步模式 settings = wo