本文主要是介绍Carla自动驾驶仿真六:pygame多个车辆摄像头画面拼接,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
此文章主要介绍carla前后左右摄像头画面拼接到pygame上
文章目录
- 前言
- 一、要点分析
- 二、完整代码
- 三、拼接效果
- 四、总结
前言
1、使用carla做仿真测试或者开发时,如果能够将车辆周边的画面拼接并渲染,可以直观地查看周围地环境,便于调试。本文将介绍使用carla中的camera传感器监控自车周边的画面,并通过pygame可视化。
一、要点分析
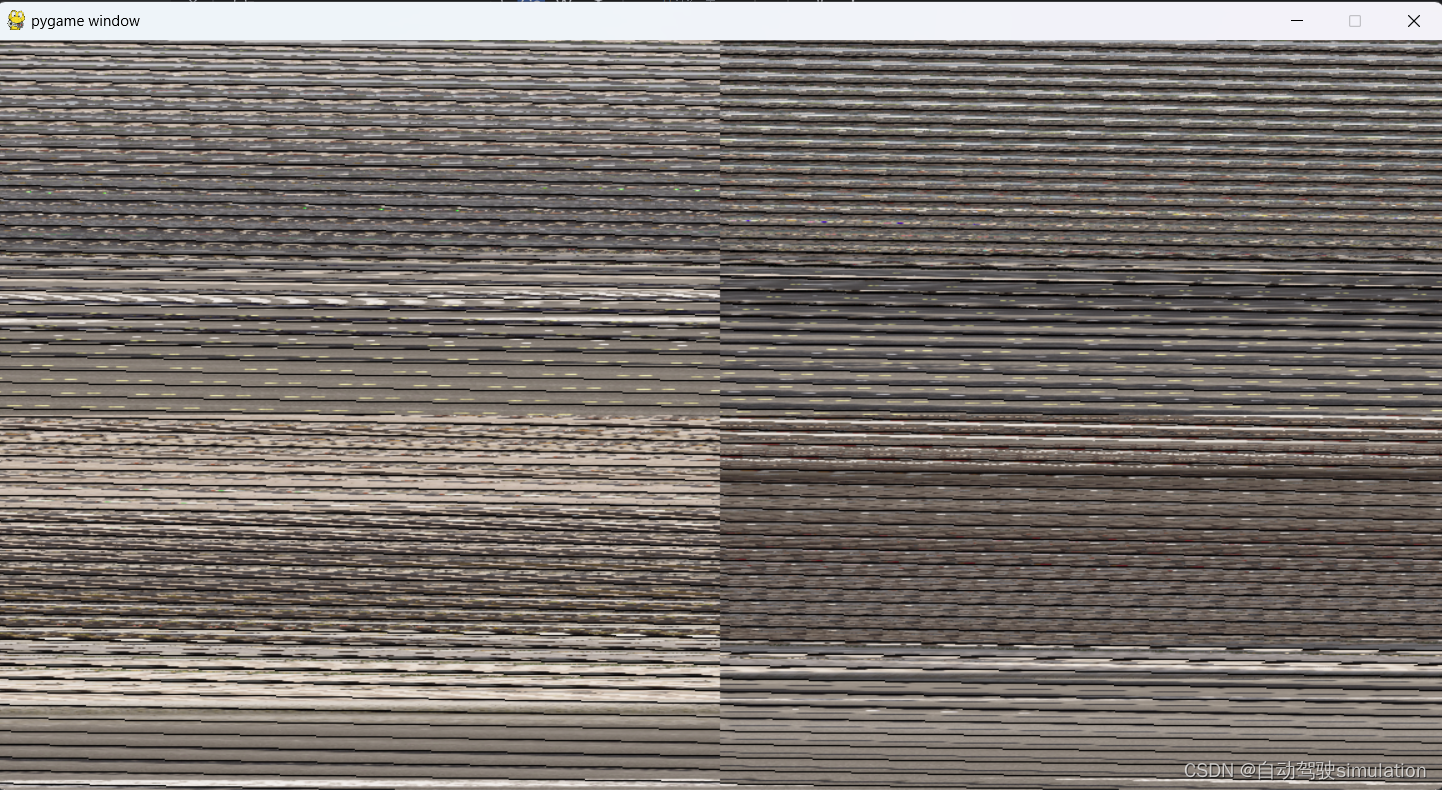
1、如果摄像头的横向分辨率image_x如果不为192的倍数,可能会导致内存对齐问题,拼接效果则会出现闪屏;调试了很久才发现这个规律,知道具体原因的大佬可以交流下,猜测是显卡解析相关导致。即:Image_x = 192 * N (N为正整数),下图为分辨率不为192倍数的拼接情况。
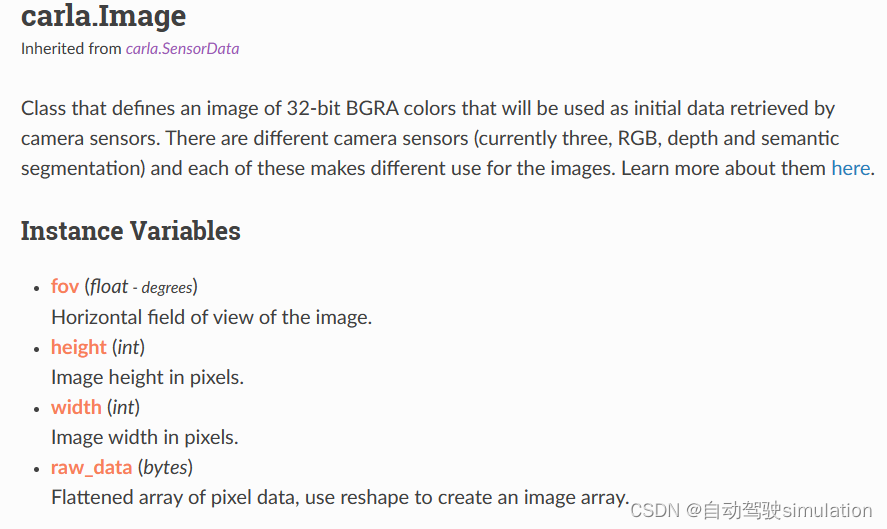
2、camera.listen(lambda data : callback(data)),listen方法是carla中用于设置摄像头传感器的回调函数的。当摄像头传感器捕获到新的图像数据image时,它会调用这个回调函数,并将图像数据image作为参数传递给它。下图中的cala.SensorData就是carla.Image,具体更多内容可以到carla官网查看。

3、使用np.concatenate拼接不同摄像头的数据。
1)numpy.concatenate是一个用于将多个数组沿指定轴连接在一起的函数。它的基本语法如下:
numpy.concatenate((a1, a2, ...), axis=0)
2)其中,a1, a2, …是你想要连接的数组,axis参数指定了连接的轴。默认情况下,axis是0,这意味着数组将在垂直方向上(即行方向)连接,当axis=1时,数组将在水平方向上(即列方向)连接。
import numpy as npa = np.array([1, 2])
b = np.array([3, 4])
c = np.concatenate((a, b), axis=0)print(c) # 输出:[1 2 3 4]==============================a1 = np.array([[1, 2], [3, 4]])
a2 = np.array([[5, 6], [7, 8]])c = np.concatenate((a1, a2), axis=1)print(c)
#输出
[[1 2 5 6][3 4 7 8]]
二、完整代码
import carla
import random
import pygame
import numpy as np# 渲染对象来保持和传递 PyGame 表面
class RenderObject(object):def __init__(self, width, height):init_image = np.random.randint(0, 255, (height, width, 3), dtype='uint8')self.surface = pygame.surfarray.make_surface(init_image.swapaxes(0, 1))# 相机传感器回调,将相机的原始数据重塑为 2D RGB,并应用于 PyGame 表面
def pygame_callback(image, side):img = np.reshape(np.copy(image.raw_data), (image.height, image.width, 4))img = img[:, :, :3]img = img[:, :, ::-1]if side == 'Front':global FrontFront = imgelif side == 'Rear':global RearRear = imgelif side == 'Left':global LeftLeft = imgelif side == 'Right':global RightRight = imgif ('Front' in globals() and 'Rear' in globals()and "Left" in globals()and 'Right' in globals()):# 横向拼接(前后)(左右)摄像头的画面img_combined_front = np.concatenate((Front, Rear), axis=1)img_combined_rear = np.concatenate((Left, Right), axis=1)# 纵向拼接(前后)(左右)摄像头的画面img_combined = np.concatenate((img_combined_front, img_combined_rear), axis=0)renderObject.surface = pygame.surfarray.make_surface(img_combined.swapaxes(0, 1))class cameraManage():def __init__(self, world, ego_vehicle, pygame_size):self.world = worldself.cameras = {}self.ego_vehicle = ego_vehicleself.image_size_x = int(pygame_size.get("image_x") / 2) # 横向放置两个摄像头的画面self.image_size_y = int(pygame_size.get("image_y") / 2) # 纵向放置两个摄像头的画面def camaraGenarate(self):cameras_transform = [(carla.Transform(carla.Location(x=2.0, y=0.0, z=1.3), # 前侧摄像头安装位置carla.Rotation(pitch=0, yaw=0, roll=0)), "Front"),(carla.Transform(carla.Location(x=-2.0, y=0.0, z=1.3), # 后侧摄像头安装位置carla.Rotation(pitch=0, yaw=180, roll=0)), "Rear"),(carla.Transform(carla.Location(x=0.0, y=2.0, z=1.3), # 左侧摄像头安装位置carla.Rotation(pitch=0, yaw=90, roll=0)), "Left"),(carla.Transform(carla.Location(x=0.0, y=-2.0, z=1.3), # 右侧的摄像头安装位置carla.Rotation(pitch=0, yaw=-90, roll=0)), "Right")]# 查找RGB相机蓝图camera_bp = self.world.get_blueprint_library().find('sensor.camera.rgb')# 设置摄像头的fov为90°camera_bp.set_attribute('fov', "90")# 设置摄像头的分辨率camera_bp.set_attribute('image_size_x', str(self.image_size_x))camera_bp.set_attribute('image_size_y', str(self.image_size_y))# 生成摄像头for index, (camera_ts, camera_sd) in enumerate(cameras_transform):camera = self.world.spawn_actor(camera_bp, camera_ts, attach_to=self.ego_vehicle)self.cameras[camera_sd] = camerareturn self.camerasif __name__ == "__main__":# 连接到客户端并检索世界对象client = carla.Client('localhost', 2000)world = client.get_world()# 获取地图的刷出点spawn_point = random.choice(world.get_map().get_spawn_points())# 生成车辆并设置自动驾驶vehicle_bp = world.get_blueprint_library().filter('*vehicle*').filter('vehicle.tesla.*')[0]ego_vehicle = world.spawn_actor(vehicle_bp, spawn_point)# ego_vehicle.set_autopilot(True)#设置pygame窗口size,image_x为192的整数倍,用其他分辨率会闪屏,可能是显卡解析原因导致。pygame_size = {"image_x": 1152,"image_y": 600}#调用cameraManage类,生成摄像头cameras = cameraManage(world, ego_vehicle, pygame_size).camaraGenarate()#采集carla世界中camera的图像cameras.get("Front").listen(lambda image: pygame_callback(image, 'Front'))cameras.get("Rear").listen(lambda image: pygame_callback(image, 'Rear'))cameras.get("Left").listen(lambda image: pygame_callback(image, 'Left'))cameras.get("Right").listen(lambda image: pygame_callback(image, 'Right'))# 为渲染实例化对象renderObject = RenderObject(pygame_size.get("image_x"), pygame_size.get("image_y"))# 初始化pygame显示pygame.init()gameDisplay = pygame.display.set_mode((pygame_size.get("image_x"), pygame_size.get("image_y")),pygame.HWSURFACE | pygame.DOUBLEBUF)# 循环执行crashed = Falsewhile not crashed:# 等待同步world.tick()# 按帧更新渲染的 Camera 画面gameDisplay.blit(renderObject.surface, (0, 0))pygame.display.flip()# 获取 pygame 事件for event in pygame.event.get():# If the window is closed, break the while loopif event.type == pygame.QUIT:crashed = True# 结束ego_vehicle.destroy()camera = cameras.values()for cam in camera:cam.stoppygame.quit()
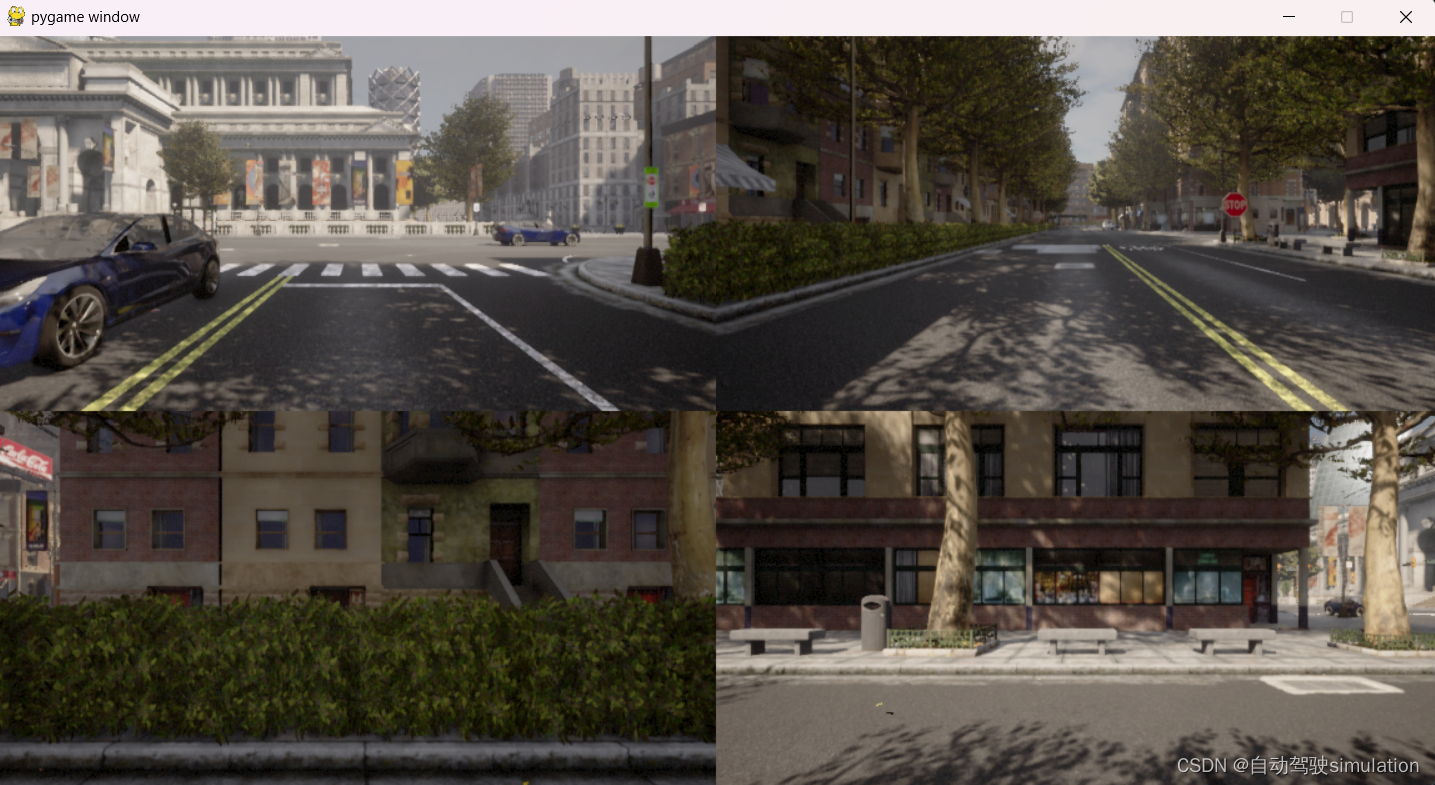
三、拼接效果
四、总结
欢迎各位大佬来交流,特别是为什么只支持192倍数的分辨率设置,还是说我的方法不严谨,欢迎交流。
这篇关于Carla自动驾驶仿真六:pygame多个车辆摄像头画面拼接的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






