canny专题
Python OpenCV -- Canny 边缘检测 (十一)
Canny 边缘检测 原理 Canny 边缘检测算法 是 John F. Canny 于 1986年开发出来的一个多级边缘检测算法,也被很多人认为是边缘检测的 最优算法, 最优边缘检测的三个主要评价标准是: 低错误率: 标识出尽可能多的实际边缘,同时尽可能的减少噪声产生的误报。 高定位性: 标识出的边缘要与图像中的实际边缘尽可能接近。 最小响应: 图像中的边缘只能标识一次。

OpenCV2.4.10之samples_cpp_tutorial-code_learn-----ImgTrans(Canny边缘检测)
本系列学习笔记参考自OpenCV2.4.10之 opencv\sources\samples\cpp\tutorial_code和 http://www.opencv.org.cn/opencvdoc/2.3.2/html/genindex.html 本博文接下来将介绍图像变换相关的Demo,如下图所示: CannyDetector_Demo.cpp(Canny边缘检测)

Canny边缘检测算法原理及其VC实现详解(三)
转载自:http://blog.csdn.net/likezhaobin/article/details/6892629 3.3 图像增强——计算图像梯度及其方向 根据上文分析可知,实现代码如下 //同样可以用不同的检测器/ / P[i,j]=(S[i,j+1]-S[i,j]+S[i+1,j+1]-S[i+1,j])/2 / / Q[i,j

imutils with Canny Edge Detection
简介 使用imutils对图像进行Canny边缘检测,与网页LOGO获取。 代码 import imutilsimport cv2url = "http://pyimagesearch.com/static/pyimagesearch_logo_github.png"logo = imutils.url_to_image(url)cv2.imshow("URL to Image", l
python实现opencv学习十七:Canny边缘检测算法
算法参考资料:https://www.cnblogs.com/mightycode/p/6394810.html 代码如下 # -*- coding=GBK -*-import cv2 as cv#边缘检测述算法def edge_image(image):blurred = cv.GaussianBlur(image, (3, 3), 0)gray = cv.cvtColor(blurre


OpenCV自学笔记3:Canny边缘检测
Canny边缘检测 引言 OpenCV提供了Canny边缘检测函数,只用一行代码就能实现图像的边缘检测,看到这里你是不是很激动呢? —————————————————————————- Canny边缘检测实例 # -*- coding:utf-8 -*-import cv2image = cv2.imread('images/test.jpg')cv2.namedWindow(

图像处理中的Canny边缘检测
Canny边缘检测是一种经典的图像边缘检测算法,于1986年由John F. Canny提出。它通过以下步骤来实现对图像中边缘的检测: 噪声抑制: 首先,对输入的图像进行平滑处理,以降低噪声对后续边缘检测的干扰。常用的方法是应用高斯滤波器,平滑图像并去除高频噪声。 计算梯度: 在平滑后的图像上计算梯度,以找到图像中的边缘。通常使用Sobel算子计算图像在水平和垂直方向上的梯度。 非最大抑制

学习c++版opencv3.4之20-canny边缘检测
Canny边缘检测。 #include <opencv2/opencv.hpp>#include <iostream>#include <math.h>using namespace std;using namespace cv;int threshold_value = 100, threshold_max = 255;int threshold_type = 0, thresho
灰度变换、自适应高斯滤波、平滑滤波、canny边缘检测、直线霍夫变换
这是我第一次写博客,主要是记录自己的学习历程,帮助像我这样的新学者提供一点点思路。 我用的opencv版本是2.4.9 和 vs2010 版本比较旧。 这里面主要有灰度变换、自适应高斯滤波、平滑滤波、canny边缘检测、直线霍夫变换,还有一个旋转变换没有实验,里面还有Mat和IplImage图像转换。 #include "stdafx.h"#include <opencv2/opencv.

C语言数字图像处理----3.2 图像边缘检测之Canny边缘检测算法
本篇将介绍图像边缘检测中的Canny边缘检测,这是传统边缘检测学习中的必学内容,也是图像算法面试中的常见问题,本文将教会初学者如何在理解算法的基础之上,通过C语言来实现Canny边缘检测算法,从而做到心中有底,胸有成竹。 [定义与算法] Canny边缘检测算子是John F. Canny于 1986 年开发出来的一个多级边缘检测算法。由于它理论上的相对完善性和效

【OpenCV学习】Canny边缘检测
图像的边缘检测的原理是检测出图像中所有灰度值变化较大的点,而且这些点连接起来就构成了若干线条,这些线条就可以称为图像的边缘。 Canny边缘检测算子是John F. Canny于 1986 年开发出来的一个多级边缘检测算法。Canny 边缘检测的数学原理和算法实现这里就不再了,有兴趣的读者可以查阅专业书籍,本文主要介绍如何在OpenCV中对图像进行Canny 边缘检测,下面就来看

FPGA实现Canny算法(Verilog)
在边缘检测算法里面Sobel是比较简单的一个算法,但是其检测出来的边缘往往是比较粗的,效果不是很好,因为我们最理想的边缘肯定就是一个宽度为1的细线。 Canny算法在此基础上进行了改进,通过使用边缘的梯度信息进行非最大值抑制(NMS)和利用双阈值,这些措施消除了假性边缘,提高了边缘检测的效果。 Canny边缘检测分为以下几个部分: 高斯滤波 Sobel边缘检测 非最大值抑制 双阈值边

iOS-Opencv 基础学习四(对图片进行图像模糊处理blur、边缘处理Canny)
iOS中 利用opencv 对图片进行模糊处理,所用到的函数-均值滤波——blur函数 原理:均值滤波是一种典型的线性滤波算法,主要是利用像素点邻域的像素值来计算像素点的值。其具体方法是首先给出一个滤波模板kernel,该模板将覆盖像素点周围的其他邻域像素点,去掉像素本身,将其邻域像素点相加然后取平均值即为该像素点的新的像素值,这就是均值滤波的本质。 原理转自 http://blog.csd

车道线检测_Canny算子边缘检测_1
Canny算子边缘检测(原理) Canny算子边缘检测是一种经典的图像处理算法,由John F. Canny于1986年提出,用于精确、可靠地检测数字图像中的边缘特征。该算法设计时考虑了三个关键目标:低错误率(即尽可能多地检测真实的边缘,同时避免误报)、边缘定位的准确性(确保检测到的边缘位置与实际边缘位置紧密对应)以及边缘的单响应性(确保图像中的每一个边缘只被检测一次,避免重复或断裂)。Ca
FPGA 图像边缘检测(Canny算子)
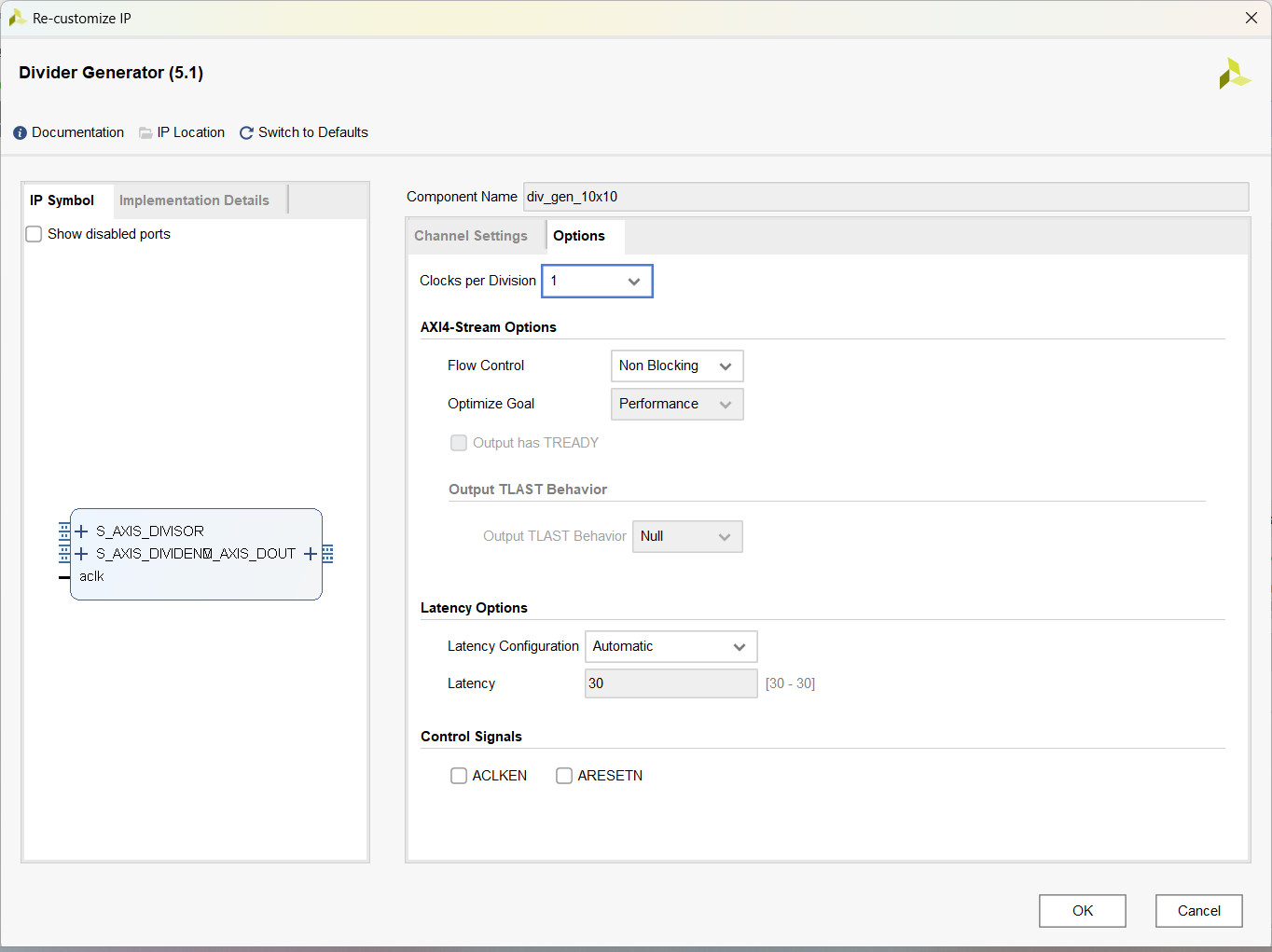
1 顶层代码 `timescale 1ns / 1ps//边缘检测二阶微分算子:canny算子module image_canny_edge_detect (input clk,input reset, //复位高电平有效input [10:0] img_width,input [ 9:0] img_height,input [ 7:0] low_threshold,input [ 7:0]
python与openCV对图像处理的canny算子实现源码分析,单个图片123
# coding=utf-8import cv2import numpy as npimput0="W:/PY/WDPY/ceshi/sswhd (5).jpg"img = cv2.imread( imput0, 0 )img = cv2.GaussianBlur( img, (3, 3), 0 )#高斯平滑处理原图像降噪canny = cv2.Canny( img, 20, 100

python使用canny和sobel算子联合检测自定义源码解决批量处理瓶盖图片霍夫变换源码实战
python使用canny和sobel算子联合检测自定义源码解决批量处理瓶盖图片霍夫变换源码实战 源码解说很清楚的哦。 函数1:jiance.py #!/usr/bin/env python # -*- coding:utf-8 -*-# Author's_name_is_NIKOLA_SSimport cv2import numpy as npfrom canny import
Canny 边缘检测算法原理
Canny 边缘检测是一种经典的边缘检测算法,由 John F. Canny 在 1986 年提出。它具有良好的性能,能够在图像中准确地检测出边缘,同时抑制了噪声的影响。Canny 边缘检测算法主要包含以下几个步骤: 高斯模糊(Gaussian Blur): 首先,对图像进行高斯模糊处理,以减少图像中的噪声。高斯模糊是一种平滑滤波器,它可以模糊图像并降低图像中像素值的变化率。 计算梯度(Gra

opencv读图像C语言实现canny边缘检测
Canny算子是John Canny在1986年提出的,那年老大爷才28岁,该文章发表在PAMI顶级期刊上的(1986. A computational approach to edge detection. IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 8, 1986, pp. 679-69


opencv边缘检测之Canny算法
文章目录 简介实战 简介 Canny在1986年提出了一种边缘检测算法,因其卓越的性能和准确性而广泛应用于各种图像分析领域。opencv中提供了这种算法,其操作步骤如下 高斯滤波:采用 5 × 5 5\times5 5×5的高斯核函数进行滤波,对图像进行平滑,从而降低图像中的波动,使边缘更加明显。梯度计算:用Sobel核函数对图像的水平和竖直方向进行滤波,并获取两个方向的一阶

【转】canny算子的理论分析
图象边缘检测中边界闭合性的分析与探讨 摘 要 在图象边缘检测中往往要求所检测到的边缘具有封闭特性,本文详细地分析了目前常用的两种算法:哈夫变换和Canny边缘检测算法,最后,探讨边缘算子应满足的准则。 关键词 边缘检测;闭合性;哈夫变换;Canny算子 1引言 图象的边缘是指图象局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个阶跃,既从一个灰度
CANNY 错误算法
CANNY 边缘增强算法 1、高斯滤波 2、对每个像素计算梯度数据,包括 x,y,z三个方向的。store in three imgs 3、CANNY算子计算梯度数据的方向tan(theta)=deta y/deta x,x,y两个方向上,分为8个大方向,看接近哪个方向,就算那个值。 4、对于每个像素点,找到该点切线方向上的相邻两点的像素值,v=vright*f(grad)+vlef
OpenCV学习笔记-Canny算子
Canny算子格式如下: Canny 采用 Canny 算法做边缘检测 void cvCanny( const CvArr* image, CvArr* edges, double threshold1,double threshold2, int aperture_size=3 ); image 单通道输入图像. edges 单通道存储边缘的输出图像 threshold1