本文主要是介绍Canny算子,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、Canny算子概述
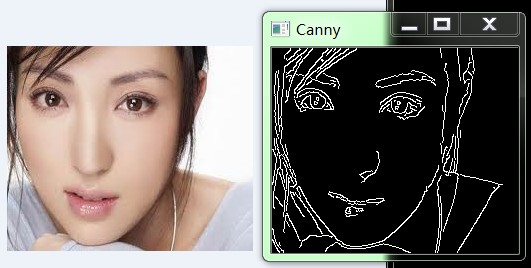
通常情况下边缘检测的目的是在保留原有图像属性的情况下,显著减少图像的数据规模。目前有多种算法可以进行边缘检测,虽然Canny算法年代久远,但可以说它是边缘检测的一种标准算法,而且仍在研究中广泛使用。
Canny算子的基本原理:总的来说,图像的边缘检测必须满足两个步骤:
(1)有效的抑制噪声,使用高斯算子对图像进行平滑;
(2)尽量精确的确定边缘的位置;
二、算法的实现步骤
Canny边缘检测算法可以分为以下5个步骤:
1. 应用高斯滤波来平滑图像,目的是去除噪声;
2. 找寻图像的强度梯度(intensity gradients);
3. 应用非最大抑制(non-maximum suppression)技术来消除边误检(本来不是但检测出来是);
4. 应用双阈值的方法来决定可能的(潜在的)边界;
5. 利用滞后技术来跟踪边界;
在Canny算法中,首先在x和y方向求一阶导数,然后组合为4个方向的导数。这些方向的导数达到局部最大值的点就是组成边缘的候选点。Canny算法最重要的一个新的特点是其试图将独立边的候选像素拼装成轮廓。轮廓的形成是对这些像素运用滞后性阈值。
三、函数
void cvCanny( const CvArr* image, CvArr* edges, double threshold1,double threshold2, int aperture_size=3 );
参数说明:
参数说明:
image 输入图像.
edges 输出的边缘图像
threshold1 第一个阈值
threshold2 第二个阈值
aperture_size Sobel 算子内核大小 (见 cvSobel).
函数 cvCanny 采用 CANNY 算法发现输入图像的边缘而且在输出图像中标识这些边缘。threshold1和threshold2 当中的小阈值用来控制边缘连接,大的阈值用来控制强边缘的初始分割。
edges 输出的边缘图像
threshold1 第一个阈值
threshold2 第二个阈值
aperture_size Sobel 算子内核大小 (见 cvSobel).
函数 cvCanny 采用 CANNY 算法发现输入图像的边缘而且在输出图像中标识这些边缘。threshold1和threshold2 当中的小阈值用来控制边缘连接,大的阈值用来控制强边缘的初始分割。
这篇关于Canny算子的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!