本文主要是介绍Python OpenCV -- Canny 边缘检测 (十一),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Canny 边缘检测
原理
Canny 边缘检测算法 是 John F. Canny 于 1986年开发出来的一个多级边缘检测算法,也被很多人认为是边缘检测的 最优算法, 最优边缘检测的三个主要评价标准是:
低错误率: 标识出尽可能多的实际边缘,同时尽可能的减少噪声产生的误报。
高定位性: 标识出的边缘要与图像中的实际边缘尽可能接近。
最小响应: 图像中的边缘只能标识一次。
步骤
1. 消除噪声。 使用高斯平滑滤波器卷积降噪。 下面显示了一个 size = 5 的高斯内核示例:

2.计算梯度幅值和方向。 此处,按照Sobel滤波器的步骤:
a. 运用一对卷积阵列 (分别作用于 x 和 y 方向):

b.使用下列公式计算梯度幅值和方向:

梯度方向近似到四个可能角度之一(一般 0, 45, 90, 135)
3. 非极大值 抑制。 这一步排除非边缘像素, 仅仅保留了一些细线条(候选边缘)。
4.滞后阈值: 最后一步,Canny 使用了滞后阈值,滞后阈值需要两个阈值(高阈值和低阈值):
a. 如果某一像素位置的幅值超过 高 阈值, 该像素被保留为边缘像素。
b. 如果某一像素位置的幅值小于 低 阈值, 该像素被排除。
c. 如果某一像素位置的幅值在两个阈值之间,该像素仅仅在连接到一个高于 高 阈值的像素时被保留。
Canny 推荐的 高:低 阈值比在 2:1 到3:1之间。
使用
OpenCV Python 中 Canny 函数原型
edge = cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]]) edge -- 函数返回 一副二值图(黑白),其中包含检测出来的边缘
image -- 需要处理的原图像,该图像必须为单通道的灰度图threshold1 -- 阈值1
threshold2 -- 阈值2
threshold2 是较大的阈值,用于检测图像中明显的边缘,但一般情况下检测的效果不会那么完美,边缘检测出来是断断续续的。所以这时候用较小的 threshold1
(第一个阈值)用于将这些间断的边缘连接起来。
apertureSize -- Sobel 算子的大小。
L2gradient -- 一个布尔值,如果为 True ,刚使用更精确的 L2 范数进行计算(即两个方向的倒数的平方和再开放), False 将使用L1 范数(直接将两个方向导数
的绝对值相加)。
示例1(静态检测)
#!/usr/bin/env python
# encoding: utf-8
import cv2
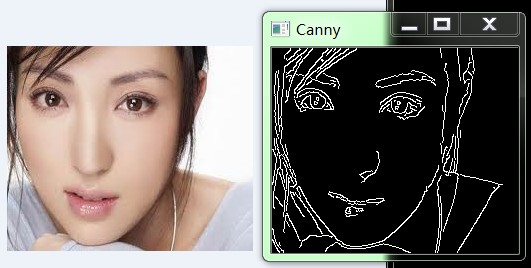
import numpy as np img = cv2.imread("2.jpg", 0) #Canny只能处理灰度图,所以将读取的图像转成灰度图img = cv2.GaussianBlur(img,(3,3),0) #高斯平滑处理原图像降噪
canny = cv2.Canny(img, 50, 150) #apertureSize默认为3cv2.imshow('Canny', canny)
cv2.waitKey(0)
cv2.destroyAllWindows() 效果图:
示例2(动态检测)
#!/usr/bin/env python
# encoding: utf-8
import cv2
import numpy as np def CannyThreshold(lowThreshold): detected_edges = cv2.GaussianBlur(gray,(3,3),0) detected_edges = cv2.Canny(detected_edges,lowThreshold,lowThreshold*ratio,apertureSize = kernel_size) dst = cv2.bitwise_and(img,img,mask = detected_edges) # just add some colours to edges from original image. cv2.imshow('canny demo',dst) lowThreshold = 0
max_lowThreshold = 100
ratio = 3
kernel_size = 3 img = cv2.imread('2.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) cv2.namedWindow('canny demo') cv2.createTrackbar('Min threshold','canny demo',lowThreshold, max_lowThreshold, CannyThreshold) CannyThreshold(0) # initialization
if cv2.waitKey(0) == 27: cv2.destroyAllWindows()
参考和转载:
程序使用的是 sunny2038 的,最后那个链接就是他的博客
http://wiki.opencv.org.cn/index.php/Canny%E8%BE%B9%E7%BC%98%E6%A3%80%E6%B5%8B
http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/imgproc/imgtrans/canny_detector/canny_detector.html
http://blog.csdn.net/sunny2038/article/details/9202641
这篇关于Python OpenCV -- Canny 边缘检测 (十一)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




