本文主要是介绍Canny算子,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Canny算子_百度百科 (baidu.com)![]() https://baike.baidu.com/item/Canny%E7%AE%97%E5%AD%90/8821789?fr=ge_ala
https://baike.baidu.com/item/Canny%E7%AE%97%E5%AD%90/8821789?fr=ge_ala
图像处理中最经典的边沿检测算法: Canny边缘检测_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV1U4411277i/?spm_id_from=333.1007.top_right_bar_window_history.content.click&vd_source=7c3bfbf39d037fe80c97234396acc524
https://www.bilibili.com/video/BV1U4411277i/?spm_id_from=333.1007.top_right_bar_window_history.content.click&vd_source=7c3bfbf39d037fe80c97234396acc524

读取图像
需要处理成灰度图,因为输出会根据图片的尺寸来决定输出的位置以及窗口的大小,所以我这里自己初始化固定了窗口大小有输出的位置。
import numpy as np
import cv2# 读取图像
image = cv2.imread('input_image.jpg', cv2.IMREAD_GRAYSCALE)# 将灰度图像调整为固定大小
gray_resized = cv2.resize(image, (500, 400), interpolation=cv2.INTER_NEAREST)# 获取屏幕尺寸
screen_height, screen_width = 1080, 1920# 计算窗口左上角位置
window_x = int((screen_width - 500) / 2)
window_y = int((screen_height - 400) / 2)# 创建窗口并显示结果
cv2.namedWindow('GrayImage', cv2.WINDOW_NORMAL) # 设置窗口大小可调整
cv2.resizeWindow('GrayImage', 500, 400)
cv2.moveWindow('GrayImage', window_x, window_y)
cv2.imshow('GrayImage', gray_resized)
cv2.waitKey(0)
cv2.destroyAllWindows()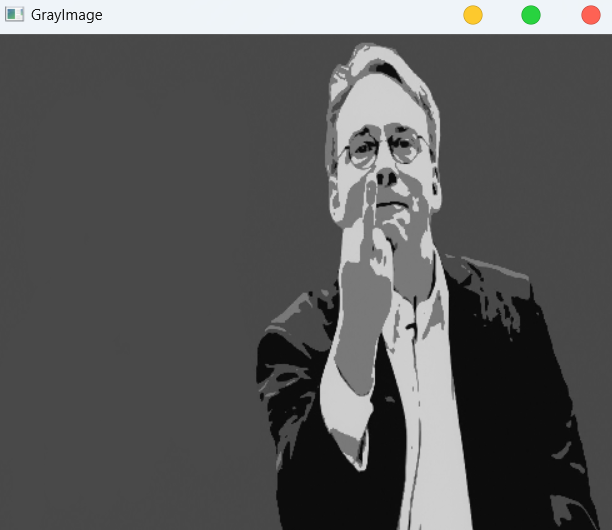
降噪(高斯滤波)
高斯滤波_百度百科 (baidu.com)![]() https://baike.baidu.com/item/%E9%AB%98%E6%96%AF%E6%BB%A4%E6%B3%A2/9032353?fr=ge_ala
https://baike.baidu.com/item/%E9%AB%98%E6%96%AF%E6%BB%A4%E6%B3%A2/9032353?fr=ge_ala
OpenCV高斯滤波函数--GaussianBlur()参数说明_gaussianblur参数-CSDN博客![]() https://blog.csdn.net/qq_28126689/article/details/105953157用于平滑图像以消除噪声,使得后续的梯度计算更加稳定。
https://blog.csdn.net/qq_28126689/article/details/105953157用于平滑图像以消除噪声,使得后续的梯度计算更加稳定。
# 高斯滤波
image_blur = cv2.GaussianBlur(image, (5, 5), 1)梯度计算
计算水平和垂直方向的梯度,因为是向量的形式他这个只有四条线来划分,假设计算出水平方向是指向0,垂直方向是指向90,他结果就是指向45,如果角度是30也会变成40。

# 计算梯度
gradient_x = cv2.Sobel(image_blur, cv2.CV_64F, 1, 0, ksize=3)
gradient_y = cv2.Sobel(image_blur, cv2.CV_64F, 0, 1, ksize=3)gradient_magnitude = np.sqrt(gradient_x ** 2 + gradient_y ** 2)
gradient_direction = np.arctan2(gradient_y, gradient_x) * 180 / np.pi非极大值抑制
将梯度图像中的局部最大值保留,以消除非边缘像素。对于每个像素,只有梯度方向上的像素值是局部最大值,才会保留,其他像素将被抑制。
就是根据前面梯度的方向,假设他梯度方向是垂直的,如果当前位置上面的元素和下面位置的元素都小于当前位置的元素,则当前位置就是局部最大值,就应该保留下来,反之就会被抑制。
# 非极大值抑制
gradient_magnitude_suppressed = np.zeros_like(gradient_magnitude)for i in range(1, gradient_magnitude.shape[0] - 1):for j in range(1, gradient_magnitude.shape[1] - 1):angle = gradient_direction[i, j]if (0 <= angle < 22.5) or (157.5 <= angle <= 180) or (-22.5 <= angle < 0) or (-180 <= angle < -157.5):if (gradient_magnitude[i, j] >= gradient_magnitude[i, j + 1]) and (gradient_magnitude[i, j] >= gradient_magnitude[i, j - 1]):gradient_magnitude_suppressed[i, j] = gradient_magnitude[i, j]elif (22.5 <= angle < 67.5) or (-157.5 <= angle < -112.5):if (gradient_magnitude[i, j] >= gradient_magnitude[i - 1, j + 1]) and (gradient_magnitude[i, j] >= gradient_magnitude[i + 1, j - 1]):gradient_magnitude_suppressed[i, j] = gradient_magnitude[i, j]elif (67.5 <= angle < 112.5) or (-112.5 <= angle < -67.5):if (gradient_magnitude[i, j] >= gradient_magnitude[i - 1, j]) and (gradient_magnitude[i, j] >= gradient_magnitude[i + 1, j]):gradient_magnitude_suppressed[i, j] = gradient_magnitude[i, j]elif (112.5 <= angle < 157.5) or (-67.5 <= angle < -22.5):if (gradient_magnitude[i, j] >= gradient_magnitude[i - 1, j - 1]) and (gradient_magnitude[i, j] >= gradient_magnitude[i + 1, j + 1]):gradient_magnitude_suppressed[i, j] = gradient_magnitude[i, j]
双阈值检测
像素梯度大于高阈值,则将其标记为强边缘;如果像素梯度介于低阈值和高阈值之间,则将其标记为弱边缘;否则,将其标记为非边缘。
介于两条线之间的就是可能保留可能淘汰还要看后续的处理,高分数线以上的直接保留,低分数线没达到的直接淘汰。
# 双阈值检测
gradient_magnitude_suppressed_normalized = cv2.normalize(gradient_magnitude_suppressed, None, 0, 255,cv2.NORM_MINMAX, cv2.CV_8U)low_threshold = int(low_threshold)high_threshold = int(high_threshold)strong_edges = (gradient_magnitude_suppressed_normalized >= high_threshold)weak_edges = (gradient_magnitude_suppressed_normalized >= low_threshold) & (gradient_magnitude_suppressed_normalized < high_threshold)
边缘连接
将弱边缘连接到强边缘,以形成完整的边缘。如果弱边缘与任何一个强边缘相连,则将其标记为边缘;否则,将其标记为非边缘。
就是画了两条分数线,低分数线以下的直接淘汰,高分数以上的直接录取,如果介于两条线之间的,看有没有关系,如果有关系就保留,没有关系就淘汰。
# 边缘连接
strong_edges_idx = np.argwhere(strong_edges)
weak_edges_idx = np.argwhere(weak_edges)edge_image = np.zeros_like(gradient_magnitude_suppressed_normalized)
edge_image[strong_edges] = 255for i, j in weak_edges_idx:if np.any(strong_edges[i - 1:i + 2, j - 1:j + 2]):edge_image[i, j] = 255代码
import numpy as np
import cv2def CannyEdgeDetection(image, sigma=1, low_threshold=20, high_threshold=50):# 1. 高斯滤波image_blur = cv2.GaussianBlur(image, (5, 5), sigma)# 2. 计算梯度gradient_x = cv2.Sobel(image_blur, cv2.CV_64F, 1, 0, ksize=3)gradient_y = cv2.Sobel(image_blur, cv2.CV_64F, 0, 1, ksize=3)gradient_magnitude = np.sqrt(gradient_x ** 2 + gradient_y ** 2)gradient_direction = np.arctan2(gradient_y, gradient_x) * 180 / np.pi# 3. 非极大值抑制gradient_magnitude_suppressed = np.zeros_like(gradient_magnitude)for i in range(1, gradient_magnitude.shape[0] - 1):for j in range(1, gradient_magnitude.shape[1] - 1):angle = gradient_direction[i, j]if (0 <= angle < 22.5) or (157.5 <= angle <= 180) or (-22.5 <= angle < 0) or (-180 <= angle < -157.5):if (gradient_magnitude[i, j] >= gradient_magnitude[i, j + 1]) and (gradient_magnitude[i, j] >= gradient_magnitude[i, j - 1]):gradient_magnitude_suppressed[i, j] = gradient_magnitude[i, j]elif (22.5 <= angle < 67.5) or (-157.5 <= angle < -112.5):if (gradient_magnitude[i, j] >= gradient_magnitude[i - 1, j + 1]) and (gradient_magnitude[i, j] >= gradient_magnitude[i + 1, j - 1]):gradient_magnitude_suppressed[i, j] = gradient_magnitude[i, j]elif (67.5 <= angle < 112.5) or (-112.5 <= angle < -67.5):if (gradient_magnitude[i, j] >= gradient_magnitude[i - 1, j]) and (gradient_magnitude[i, j] >= gradient_magnitude[i + 1, j]):gradient_magnitude_suppressed[i, j] = gradient_magnitude[i, j]elif (112.5 <= angle < 157.5) or (-67.5 <= angle < -22.5):if (gradient_magnitude[i, j] >= gradient_magnitude[i - 1, j - 1]) and (gradient_magnitude[i, j] >= gradient_magnitude[i + 1, j + 1]):gradient_magnitude_suppressed[i, j] = gradient_magnitude[i, j]# 4. 双阈值检测gradient_magnitude_suppressed_normalized = cv2.normalize(gradient_magnitude_suppressed, None, 0, 255,cv2.NORM_MINMAX, cv2.CV_8U)low_threshold = int(low_threshold)high_threshold = int(high_threshold)strong_edges = (gradient_magnitude_suppressed_normalized >= high_threshold)weak_edges = (gradient_magnitude_suppressed_normalized >= low_threshold) & (gradient_magnitude_suppressed_normalized < high_threshold)# 5. 边缘连接strong_edges_idx = np.argwhere(strong_edges)weak_edges_idx = np.argwhere(weak_edges)edge_image = np.zeros_like(gradient_magnitude_suppressed_normalized)edge_image[strong_edges] = 255for i, j in weak_edges_idx:if np.any(strong_edges[i - 1:i + 2, j - 1:j + 2]):edge_image[i, j] = 255return edge_image# 读取图像
image = cv2.imread('input_image.jpg', cv2.IMREAD_GRAYSCALE)# 使用Canny算子进行边缘检测
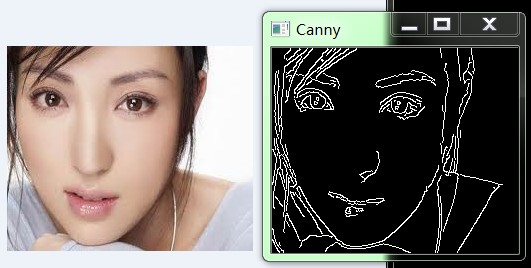
edges = CannyEdgeDetection(image)# 将边缘图像调整为固定大小
edges_resized = cv2.resize(edges, (500, 400), interpolation=cv2.INTER_NEAREST)# 获取屏幕尺寸
screen_height, screen_width = 1080, 1920# 计算窗口左上角位置
window_x = int((screen_width - 500) / 2)
window_y = int((screen_height - 400) / 2)# 创建窗口并显示结果
cv2.namedWindow('Canny Edge Detection', cv2.WINDOW_NORMAL) # 设置窗口大小可调整
cv2.resizeWindow('Canny Edge Detection', 500, 400)
cv2.moveWindow('Canny Edge Detection', window_x, window_y)
cv2.imshow('Canny Edge Detection', edges_resized)
cv2.waitKey(0)
cv2.destroyAllWindows()
这个代码是用chatGpt生成的,思路大概是没错的,但是不知道能不能对的上,还有就是识别出来的图像不对,可能很稀疏的几个点,也可能很密集,这个就需要调整高阈值和低阈值来处理。
这篇关于Canny算子的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!