boundary专题

Python实现requests-post(Multipart/form-data格式)boundary=----WebKitForm
这种模式相比于普通post,实在太烦了,这种基本都是用来上传文件(包括图片、excel、doc等) import requestsfrom requests_toolbelt.multipart.encoder import MultipartEncoderimport jsonurl = 'http://www.requests-post.com'headers = {'Accept':
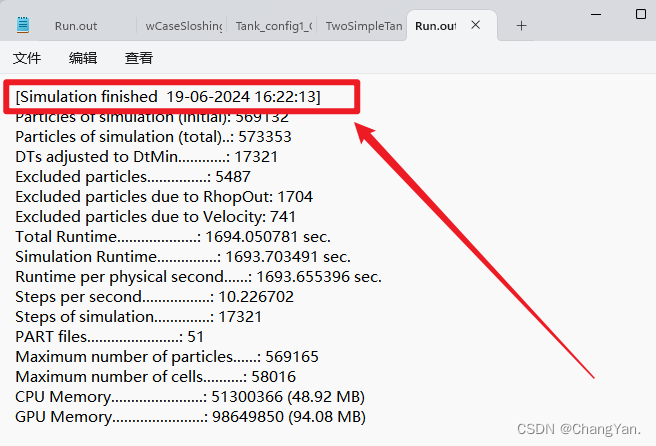
DualSPHysics运行报错ERROR: Some boundary particle was excluded.
如下查看输出,看到报错ERROR: Some boundary particle was excluded.某些边界粒子超出了模拟域的+X限制(右限制),具体错误的边界溢出粒子储存在Error_BoundaryOut.vtk里边。 用paraview打开Error_BoundaryOut.vtk还有边界的stl,可以看到粒子确实已经出去了 看一下DualSPHysics的xml里的配置 可

解决centos使用parted命令分区出现的警告Partition 1 does not start on physical sector boundary
问题描述 最近因为工作需要,需把申请的Linux服务器大容量磁盘分区并挂载,在实施的过程中遇到了这样一个问题:使用parted命令分区完毕后,使用fdisk –l 命令查看磁盘分区情况,发现有一条警告信息(Partition 1 does not start on physical sector boundary.)大致意思是:分区1不是从物理扇区的边界开始的。如图所示: 查了好多资料都说
2D人脸对齐:《Look at Boundary: A Boundary-Aware Face Alignment Algorithm》
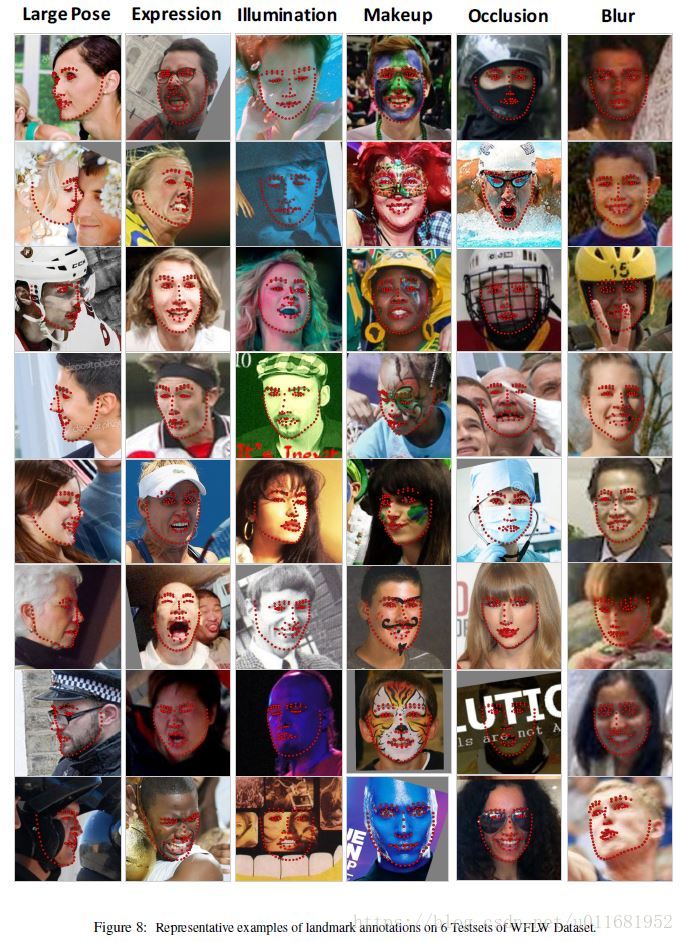
《Look at Boundary: A Boundary-Aware Face Alignment Algorithm》 来源:清华 商汤 源码:https://github.com/wywu/LAB 目录 文章目录 0 Abstract1 Introduction2 Related Work3 Boundary-Aware Face Alignment3.1 Boundary-aw
React+TS前台项目实战(二)-- 路由配置 + 组件懒加载 + Error Boundary使用
文章目录 前言一、路由配置和懒加载lazy的使用二、TS版本Error Boundary组件封装三、在layout组件中使用Suspense组件和错误边界组件总结 前言 本文将详细介绍项目中的页面路由配置和异步组件懒加载处理,以提高用户体验,实现过渡效果。 一、路由配置和懒加载lazy的使用 (1)在React中,通常使用Suspense和lazy函数来实现懒加载,
react项目中封装一个通用的边界Boundary
# Boundary 通用的边界,同时是一个Suspense 和一个 ErrorBoundary 正常情况不直接用,使用一下几个封装好的: -Boundary.FullSizeLoading: 占满父容器全部高度,居中显示等待动画; -Boundary.Loading: 占满一行,显示一个普通尺寸的等待动画; -Boundary.Blank: 什么都不显示,加速速度足够快的话可以使用;
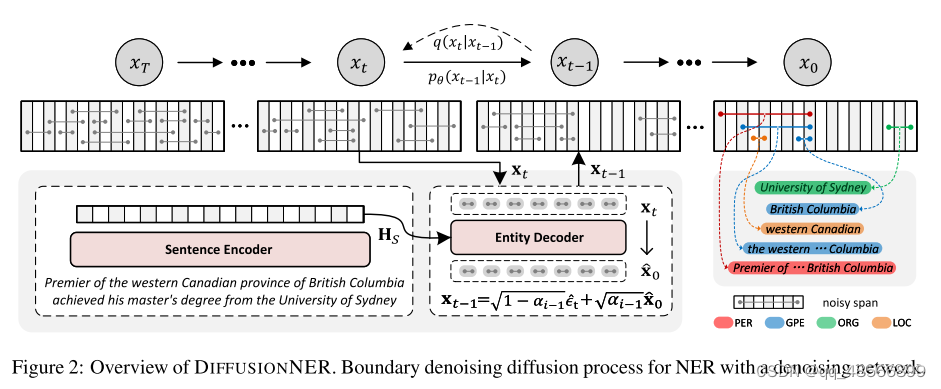
《DiffusionNER: Boundary Diffusion for Named Entity Recognition》
Submitted 22 May, 2023; originally announced May 2023. Comments: Accepted to ACL 2023, submission version https://github.com/tricktreat/DiffusionNER 在这里插入图片描述 问题: 命名实体识别任务中存在的噪声跨度(边界不清晰)如何处理? 解

Content type 'multipart/form-data;boundary=.. WebKitFormBoundary..;charset=UTF-8' not supported
说下场景吧,前端一个订单表单,填好相应的表单信息封装成json数据上传,并且附带上传一个Excel文件,同一个接口提交到后端,想着后端代码通过实体接收json数据,然后解析接收到的excel文件,然而 这么基础的http请求头类型的问题坑了自己(对象实体和文件是不同类型的数据,同一个接口提交,用Content-Type: multipart/form-data是解析不了我的json参数的)

B Boundary(计算几何) 2020牛客暑期多校训练营(第二场)
题意: 求一个圆(保证经过原点),覆盖(点在圆周上)最多的点。求点数 思路: 3点求圆心,最后排序来算多少个圆心一样(因为一定经过原点,所以不需要确定半径)。但感觉还是数据水了,这样写还用了double很容易被卡精度。 正解的意思是同弧所对圆心角相等,所以你固定一个点,再枚举其他点看多少个角度相等取最大值。 但是这个过程不能出现下面的情况。只需要规定A只能出现在OP下方即可,也就是OP与

【悟空云课堂】第三十九期:违反信任边界(CWE-501: Trust Boundary Violation)
关注公众号“中科天齐软件安全中心”(id:woocoom),一起涨知识! 该栏目为中科天齐全新规划的悟空云课堂,每周五下午18:00准时上线,旨在科普软件安全相关知识,助力企业有效防范软件安全漏洞,提升网络安全防护能力。 什么是违反信任边界? 让数据从不受信任的一边移到受信任的一边却未经验证。 违反信任边界漏洞的构成条件有哪些? 当程序模糊了受信任和不受信任之间的界限时,就会发生
自动驾驶---Motion Planning之Speed Boundary
1 背景 在上篇博客《自动驾驶---Motion Planning之Path Boundary》中,笔者主要介绍了path boundary的一些内容,通过将道路中感兴趣区域的动静态障碍物投影到车道坐标系中,用于确定L或者S的边界,并利用道路信息再确定Speed的边界,最后结合粗糙的速度曲线和路径曲线,即可使用优化的方法求解得到最终的轨迹信息(s,s',s'',l,l',l'')
自动驾驶---Motion Planning之Speed Boundary(上)
1 背景 在上篇博客《自动驾驶---Motion Planning之Path Boundary》中,笔者主要介绍了path boundary的一些内容,通过将道路中感兴趣区域的动静态障碍物投影到车道坐标系中,用于确定L或者S的边界,并利用道路信息再确定Speed的边界,最后结合粗糙的速度曲线和路径曲线,即可使用优化的方法求解得到最终的轨迹信息(s,s',s'',l,l',l'')

用于模拟颗粒流的直接强迫浸没边界法 An immersed boundary method with direct forcing 笔记
原文:Uhlmann, Markus. “An immersed boundary method with direct forcing for the simulation of particulate flows.” Journal of computational physics 209.2 (2005): 448-476. 目录 概述引言问题表述固体对流体的作用欧拉和拉格朗日变量的

自动驾驶---Motion Planning之Path Boundary
1 背景 在上文《自动驾驶---Motion Planning之LaneChange》中,笔者提到过两种LaneChange的思路,这里再简单回顾一下:(1)利用Routing和周围环境的信息,决定是否进行换道的决策;(2)采用的博弈思想(蒙特卡洛树搜索---MCTS)决定是否进行换道的决策。不管是变道,避让还是借道等决策,如果后续采用优化的思想进行局部轨迹的求解,那么在求解之前

显著性检测论文详解(一):BASNet: Boundary-Aware Salient Object Detection
BASNet: Boundary-Aware Salient Object Detection 简述: 对于显著性目标检测,以往的研究大多集中在区域精度上,而不是边界质量上。在这篇论文中,我们提出了一种predict-refine architecture,BASNet,以及一种新的混合损耗来实现边界感知的突出对象的设计。 问题or相关工作: 由上图,可以看到现在的方法(FCN等),预测的
React 错误边界组件 react-error-boundary 源码解析
文章目录 捕获错误 hook创建错误边界组件 Provider定义错误边界组件定义边界组件状态捕捉错误渲染备份组件重置组件通过 useHook 控制边界组件 捕获错误 hook getDerivedStateFromError 返回值会作为组件的 state 用于展示错误时的内容 componentDidCatch 创建错误边界组件 Provider 错误边界组件其实是一个
rust中slice panicked at 'byte index 5 is not a char boundary' 问题解决办法
今天在工作中遇到一个问题,string调用truncate()接口panic了,报错信息大致如下:thread '0' panicked at 'assertion failed: self.is_char_boundary(new_len)', liballoc/string.rs:1121:13 我的代码如下: 示例1: fn main() {let mut s = String::fr

An example: 2D immersed boundary lattice Boltzmann method code--By Timm Krüger.2011.
// 谢谢Timm Krüger大佬的代码。 还是老样子,有啥问题Feel free to tell us~毕竟群众力量大嘛~QQ群:293267908。// 话不多说,上干货! // ISBN 978-3-319-44649-3 (Electronic) // 978-3-319-44647-9 (Print)// http://www.springer.com/978-3-3
System.IO.InvalidDataException: Missing content-type boundary.
开发语言:C#框架集:.NET 8 使用HttpClient上传文件报错:System.IO.InvalidDataException: Missing content-type boundary. 解决代码: [TestMethod]public async Task Test3(){string fileName = "132.pdf";HttpClient httpClient =
Lumerical FDTD Setup Tips ------ Boundary Conditions
Lumerical FDTD etup Tips ------ Boundary Conditions 引言正文 引言 我们看到许多不同类型的边界条件能够在 FDTD 中被设置,那么设置边界条件的时候需要注意哪些事情呢,这里做一下简单地介绍。 正文 当我们使用 PML 边界条件时, “extend structure through pml” 选项会被选择。当这个选项被激活时

An introduction to boundary conditions
ON BOUNDARY CONDITIONS FOR MULTIDIMENSIONAL HYPERBOLIC SYSTEMS OF CONSERVATION LAWS IN THE FINITE VOLUME FRAMEWORK 多维双曲方程 The initial boundary value problem(I.B.V.P) in the linear case 首先考虑最

Indoor Depth Completion with Boundary Consistency and Self-Attention
Indoor Depth Completion with Boundary Consistency and Self-Attention 这篇文章主要提出了边界一致性网络(Boundary Consistency)和整合了(Self-Attention)这两个方法 摘要 背景 深度估计有助于3D识别,目前的商品级别的深度相机可以捕获深度和彩色图片 存在问题并提出课题 传感器存在无法识别到光

I Can Find You! Boundary-Guided Separated Attention Network for Camouflaged Object Detection
Abstract 提出:边界引导分离注意网络BSA-Net 双分支:反向注意力分支,消除伪装对象的内部,关注背景;正向注意力分支,关注前景边界引导模块 1. Introduction 目前COD面临的问题:伪装对象与背景边界模糊 BSA-Net是一种由粗到精的学习模型,利用三个模块: 残差多尺度特征提取器RMFE:捕获上下文信息分离注意力机制SEA:处理敏感-不变性困境,建立正常注意

【论文阅读笔记】AID: Pushing the Performance Boundary of Human Pose Estimation with Information Dropping Aug
论文地址:AID: Pushing the Performance Boundary of Human Pose Estimation with Information Dropping Augmentation 论文总结 本文没有提出新的方法,主要是探索了信息丢失数据增强手段的应用中存在的问题,以及能带来的提升。 之前的论文要不就是没有使用信息丢失的数据增强手段,要不就是验证了信息

4.2.2 产品碳足迹核算边界 Product Carbon Footprint Accounting Boundary
产品碳足迹核算的系统边界,一般可选择采用“摇篮到大门”或者“摇篮到坟墓”的方式。“摇篮到大门”通常是指从原材料提取、完成产品本身的生产加工、包装,到出厂或下游客户的过程为核算边界;“摇篮到坟墓”则是指以从原材料的提取加工、到产品的生产、包装、市场营销、使用、维护、再循环、废弃处置等过程为核算边界。还要明确产品碳足迹的核算的时间边界,通常可以选择“一年/一段时间/一批次的生产时间”等。选择时间边