autosar专题

基于Hypervisor智能驾舱的AUTOSAR解决方案
MENTOR嵌入式管理程序 目前,通常使用两种类型的管理程序(图6): Type 1本机管理程序:一种在硬件上本机运行的管理程序,因为它充当核心中的操作系统。Type 2托管虚拟机监控程序:此类型的虚拟机监控程序必须由另一个操作系统托管,并且仅负责使用主机操作系统可用的资源来虚拟化客户操作系统。 图6:虚拟机管理程序 虚拟化的工作原理是从硬件上运行的应用程序中抽象出物理硬件和设备。虚拟化流程管理

Autosar(Davinci) --- 创建一个S/R类型的port(下)
前言: 前面章节我们讲解了S/R类型的Port如何创建,这一章节,我们着重讲一下生成的代码,以及我们如何添加代码让这些门与灯之间的关系产生连接。 一、CtSaDoor.c 在【Rte.c】的【IO_TASK】中我们可以看到,反复的判断Rte_Ev_Cyclic_IO_Task_0_200ms这个条件是否成立,当200ms到达时,调用RCtSaDoorReadDoor函数,去读

AUTOSAR Adaptive与智能汽车E/E架构发展趋势
AUTOSAR Adaptive是一个面向现代汽车应用需求的标准,特别适用于那些需要高计算能力和灵活性的应用。以下是AUTOSAR Adaptive的典型特性: 高计算能力:AUTOSAR Adaptive支持使用MPU(微处理器),这些处理器的性能与PC或智能手机中的处理器相当。这样的高计算能力是实现半自动驾驶和其他复杂功能所必需的。动态更新和管理:AUTOSAR Adaptive的架构允

LIN协议栈 AUTOSAR架构下 状态管理
一、LIN State Manager 概述 功能 :负责控制 LIN 总线的通信状态,包括切换调度表(仅 LIN 主节点)、处理睡眠和唤醒操作、通知上层新状态等。约束 :每个 ECU 中最多有一个实例;所有关于调度表的操作仅适用于 LIN 主节点;适用于所有使用 LIN 的汽车领域。依赖关系 :依赖于 Communication Manager(ComM)和 LIN Interface(Lin

Autosar OS基础知识导图
Autosar OS基础 概述 Autosar简介 定义 Autosar(汽车开放系统架构)是由汽车制造商,软件供应商及其他相关厂商专为汽车软件合作指定的规范、标准、架构。 目标 建立一个独立于硬件的分层软件架构:实现高内聚、低耦合,提高软件的可重用性、可扩展性和互操作性。为应用实施提供一套方法论:包括制定无缝的软件架构堆叠流程,并将应用软件无缝整合至ECU中。制定统一的车
AUTOSAR开源OS——Trampoline的编译与使用(一)
环境准备 本人环境 CentOS7 代码下载 GitHub上去clone对应的代码到本地 git clone https://github.com/TrampolineRTOS/trampoline.git 编译goil 进入到如下目录/trampoline/goil/makefile-unix cd /trampoline/goil/makefile-unix 使用如下命令
AUTOSAR_EXP_ARAComAPI的5章笔记(1)
5.1 High Level API Structure ara::com提供了一个支持AUTOSAR服务模型的API。服务有Method、Event、Filed和Trigger。 Method:在服务应用程序中执行一个可以返回值的函数(如校准方法)。 Event:当特定条件发生时(例如制动事件),服务应用程序发送一个事件(也可能包括一个值)。客户端应用程序可以订阅事件。 Filed:在

【OS】AUTOSAR OsTask切换原理
目录 前言 正文 1.OS管理CSA依赖的底层指令 1.1. SVLCX指令 1.2. RFE指令 2. OsTask上下文切换关键数据结构 3.OsTask初始化时进行的CSA操作 4.OsTask被抢占时进行的CSA操作 5.总结 前言 在《【OS】AUTOSAR Os是如何启动第一个Task的》一文和《【OS】AUTOSAR OS如何实现Task抢占》一文中都涉

Autosar(Davinci) --- 创建一个OS TASK
目录 前言 一、认识OS 二、创建一个Basic Task 三、创建一个Extended Task 四、Task Mapping 五、生成代码 六、代码集成与编译 七、烧录&调试 八、Basic Task & Extended Task代码分析 前言 所有的runnable都是基于在TASK上运行的,那么我们这章就讲解,如何去创建一个TASK。 一、

Autosar(Davinci) --- 创建一个S/R类型的port(中)
目录 前言 一、创建runnable 1.1 创建CtApMySWC的runnbale 1.2 Triggers 1.3 Access Points 1.4 创建CtSaInteriorLight的runnable 1.5 创建SaDoor的runnable 二、Check与保存 三、打开Davinci CFG 3.1 同步 3.2 创建OS Taks以及Task Mappi

AUTOSAR_EXP_ARAComAPI的第4章笔记
为了理解AUTOSAR_EXP_ARAComAPI.pdf的第4章内容,生搬硬套的翻译了一把,准备先囫囵吞枣,再仔细理解。因为这些内容的理解也不是一时半会儿的。所以先放上来。 1.AUTOSAR_EXP_ARAComAPI.pdf的介绍 通常,阅读正式的规范并不是学习和理解某项技术的最简单的方法。对于AUTOSAR AP中的通信管理API (ara::com)来说尤其如此。因此,本文档不仅
【OS】AUTOSAR OS Alarm实现原理
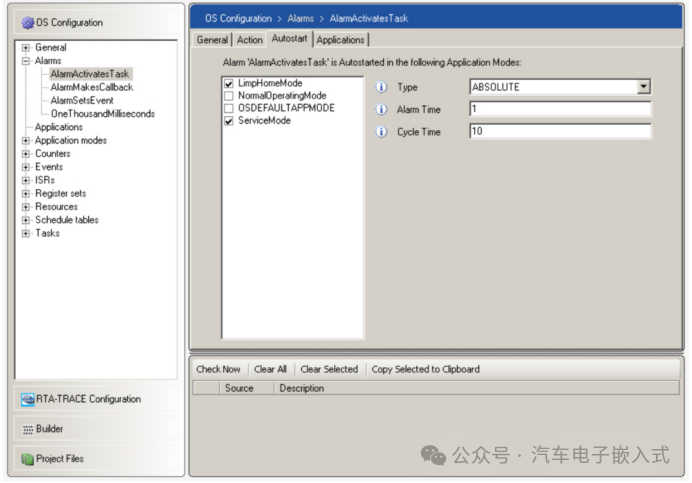
目录 前言 正文 1.OsAlarm配置 1.1 工具配置Alarm 1.1.1. 顶层OsAlarm配置 1.1.2. OsAlarmAction 1.1.3. OsAlarmAutostart 1.2 配置代码分析 1.2.1. Os_JobConfigType 2.OsAlarm实现 3.总结 前言 在《【OS基础】符合AUTOSAR标准的RTAOS-Ala
AUTOSAR_EXP_ARAComAPI.pdf的第4章笔记
4 Fundamentals 为了理解AUTOSAR_EXP_ARAComAPI.pdf的第4章内容,生搬硬套的翻译了一把,准备先囫囵吞枣,再仔细理解。因为这些内容的理解也不是一时半会儿的。所以先放上来。 AUTOSAR_EXP_ARAComAPI.pdf的概述 因此,ara::com不提供任何类型的组件模型或框架,这些模型或框架将负责组件生命周期、程序流管理或根据相应应用程序的正式组件描述
【资料】AUTOSAR学习资料获取
文章目录 1 前言2 声明3 资料获取方式 1 前言 感谢大家关注本专栏~自专栏开篇以来,至2024年8月底,已经更新了30余篇文章。随着博主写作经验的丰富,专栏的架构和文章的内容质量也在逐渐的提高,最近特意将之前的博文配图重新用新的软件工具来绘制了一遍,希望能够辅助大家的理解。 除此之外,博主特意准备了一些之前在学习过程中搜集的学习资料,整理分享给大家。 2 声明 特意强调

汽车功能安全--AutoSAR中的功能安全机制
目录 1. Memory Partitioning 2. Timing\Excute Monitor 3. E2E 4.小结 大家好,这里是高温下认真码字的肌肉;许久没有聊中间件的问题,正巧可能要启动SafetyPack的开发,因此今天回顾回顾在AUTOSAR文档中关于Safety的一些机制。 在实际开发中,我们经常遇到不同功能安全等级的软件模块集成到一个ECU中,例如座舱
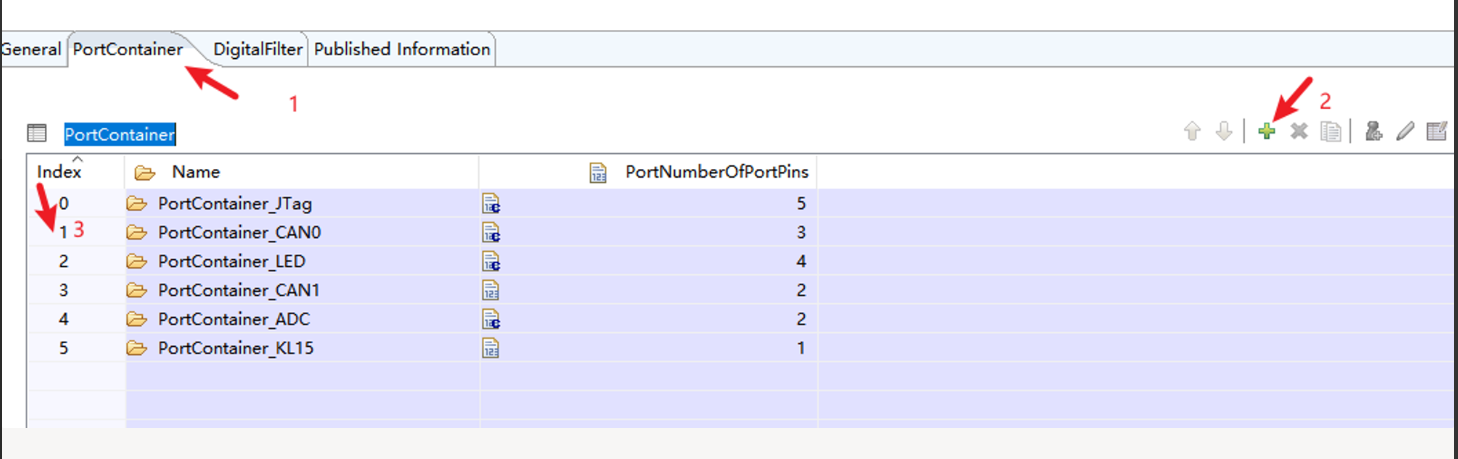
Autosar_MCAL_Port
PORT Driver就是对微控制器(MCU)的整个PORT模块进行初始化配置。很多端口和管脚被分配有多种不同的功能,即可以进行引脚功能复用,比如通用I/O、adc、pwm、spi等功能。因此,对PORT必须有一个整体的配置和初始化,对各管脚的具体配置和使用取决于微控制器和ECU的引脚功能分配。 PORT初始化数据应当尽可能高效地写到每个端口。DIO驱动中所用到的端口的配置和初始化都是在PORT驱
域控制器的四大支柱分别是车载以太网、自适应Autosar
域控制器的四大支柱分别是车载以太网、自适应Autosar、高性能处理器和集中式E/E架构。 百度安全验证 。自适应Autosar采用Proxy/Skeleton的通信架构,同时采用中间件SOME/IP
小柴带你学AutoSar系列一、基础知识篇(6)车规级MCU入门RH850
flechazohttps://www.zhihu.com/people/jiu_sheng 小柴带你学AutoSar总目录https://blog.csdn.net/qiansh
Autosar Dcm配置-0x23服务ReadMemoryByAddress-基于ETAS软件
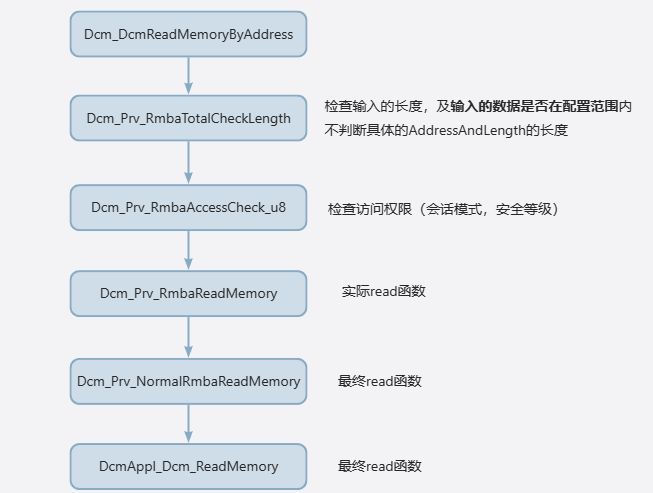
文章目录 前言Dcm配置DcmDsdDcmDspDcmDspMemoryIdInfo 代码分析总结 前言 一般在调教开发阶段,会使用XCP进行观测和标定,本质上也是操作指定的内存地址。量产后,一般XCP会取消。本文介绍的UDS ReadMemoryByAddress服务,也是读取内存地址的值。在没有XCP时,通过ReadMemoryByAddress服务,也可以实现特定地址的
“AUTOSAR Nvm_WriteAll()掉电无法正常更新Nvm数据” 问题分析
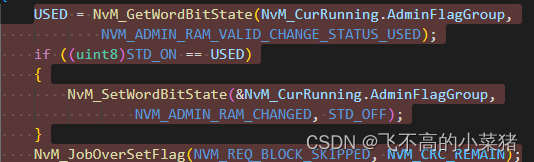
1、问题现象 再掉电时调用Nvm_WriteAll()函数后,再重新上电,发现下电前更新得NvmBlock数据未被正确更新到Nvm中。掉电时直接调用Nvm_WriteBlock()函数,可以正常更新指定得NvmBlock块。 2、排查 NvM_InterWriteAll()函数有被正常执行。NvM_InterWriteAll()函数中调用得NvM_UpdateValidandChange
Autosar实践——诊断配置(DaVinci Configuration)
文章目录 一、制作诊断数据库文件(cdd文件)二、导入诊断数据库文件并修复模块生成的问题三、创建SWC CS接口Service Ports四、创建Service Runnable五、关联SWC和DCM/DEM模块六、RTE代码编写22服务2E服务31服务DTC Set/Get 关联文章列表: Autosar-软件架构 Autosar诊断-简介和功能概述 Autosar诊断-DCM
Autosar诊断-FIM模块功能介绍
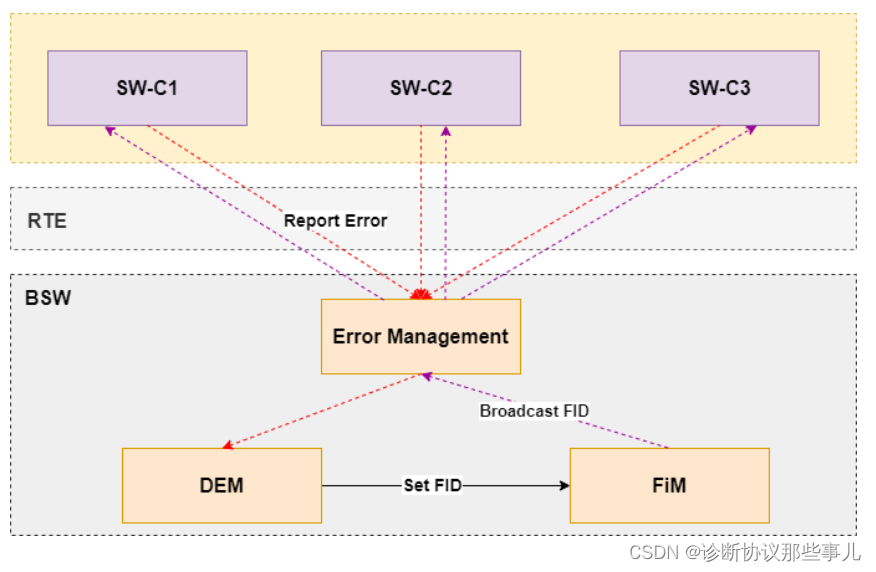
文章目录 前言一、FIM模块概述二、FID概念介绍Event ID和DTC之间的关系Event ID与FID之间的关系FIM数据结构 三、FiM模块与SW-C模块交互关系四、FIM模块函数调用关系FiM功能模块作用过程 前言 Autosar诊断的主体为UDS(Unified Diagnostic Services)协议,即统一的诊断服务,是面向整车所有ECU的一种诊断通信方
Autosar-DEM诊断事件管理流程
文章目录 前言一、故障事件监控二、故障信息上报三、故障信息处理Event的使能条件 四、故障信息存储五、故障系统降级 关联文章:Autosar实践——DEM配置 前言 DEM全称“Diagnostic Event Management”,该模块是AUTOSAR架构中的BSW模块之一。谈到故障,我们首先会想到如何去监控,发现它,去判断是不是一个偶发性的故障,确定是故障后,看要
【OS基础】符合AUTOSAR标准的RTAOS-Alarms详解
目录 前言 正文 7.报警Alarms 7.1配置Alarms 7.1.1激活一个任务 7.1.2 设置一个事件 7.1.3报警回调Alarm Callback 7.1.4 增加计数器值 7.2设置Alarms 7.2.1 绝对Alarms 7.2.2 相对Alarm 7.3自启动Alarms 7.4 删除Alarms 7.5确认何时会发生Alarm 7.6非周期Al
【ETAS CP AUTOSAR基础软件】BswM模块详解
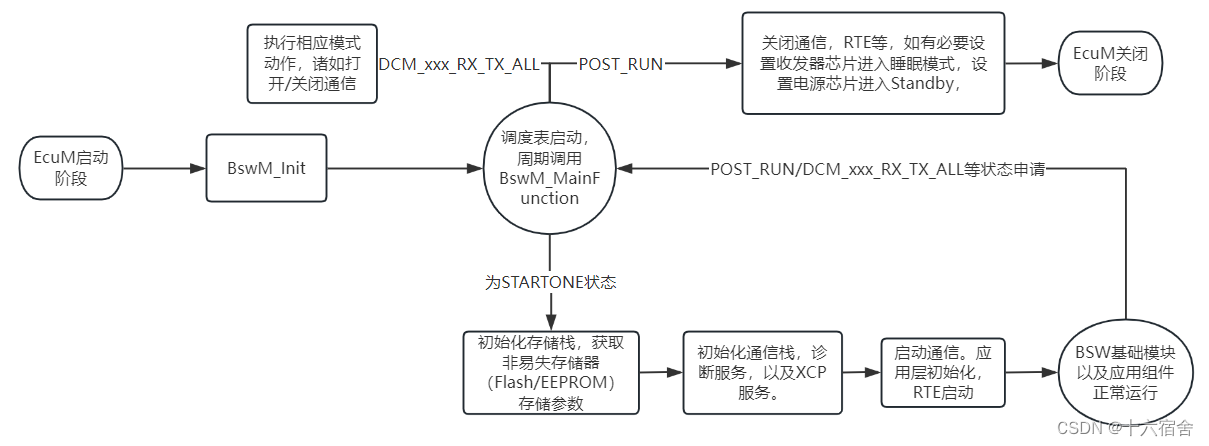
文章包含了AUTOSAR基础软件(BSW)中BswM模块相关的内容详解。本文从AUTOSAR规范解析,ISOLAR-AB配置以及模块相关代码分析三个维度来帮读者清晰的认识和了解BswM这一基础软件模块。文中涉及的SOLAR-AB配置以及模块相关代码都是依托于ETAS提供的工具链来配置与生成的,与AUTOSAR规范之间可能会有些许的出入,但总体的功能要点与处理流程都应该是一致的。 BswM基础模块
【OS】AUTOSAR OS调度器实现原理
目录 前言 正文 1.Scheduler逻辑原理概览 2.Scheduler配置 3.Scheduler具体实现原理 4.Scheduler初始化 5. Scheduler任务的插入 6.Scheduler任务的弹出 7.总结 前言 在<<【OS】AUTOSAR Os是如何启动第一个Task的>>一文中我们介绍了AUTOSAR Os是如何启动第一个Task的,并在2.