本文主要是介绍Autosar_MCAL_Port,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
PORT Driver就是对微控制器(MCU)的整个PORT模块进行初始化配置。很多端口和管脚被分配有多种不同的功能,即可以进行引脚功能复用,比如通用I/O、adc、pwm、spi等功能。因此,对PORT必须有一个整体的配置和初始化,对各管脚的具体配置和使用取决于微控制器和ECU的引脚功能分配。
PORT初始化数据应当尽可能高效地写到每个端口。DIO驱动中所用到的端口的配置和初始化都是在PORT驱动模块中完成的。因此,在使用DIO功能之前,应先进行PORT的初始化。
注意:使用Port,需要使能对应Port外设时钟,在MCU模块设置。
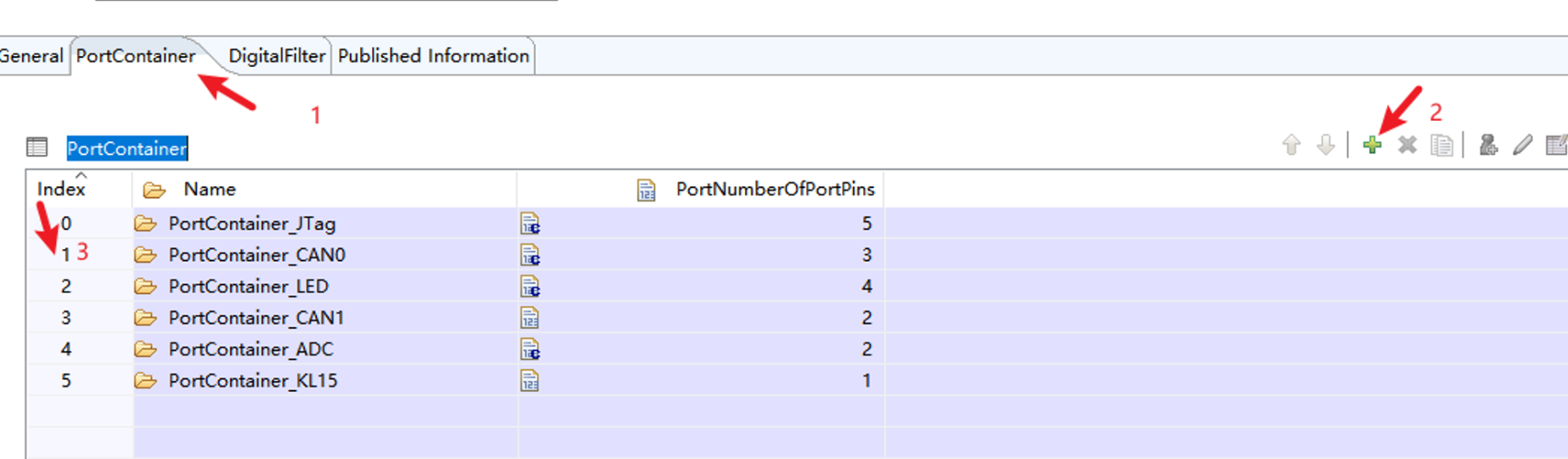
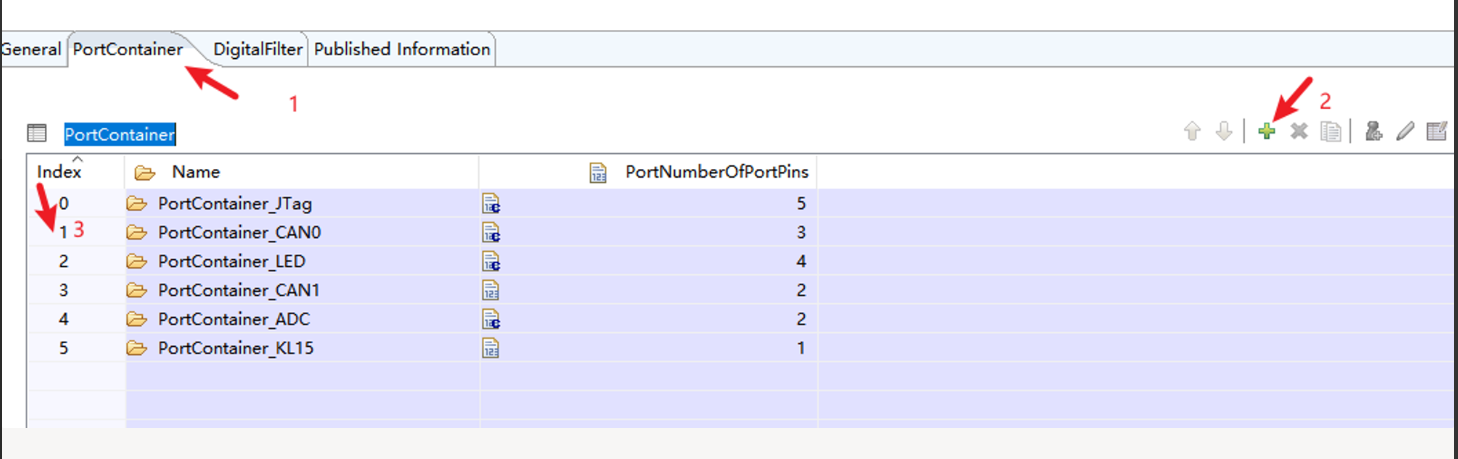
1、PortContainer说明
| Name | Description |
|---|---|
| PortNumberOfPortPins | 使用默认配置先导入所有的PIN脚信息 |
| PortPin Passive Filter Enable | 默认配置即可 |
| PortPin Direction Changeable | |
| PortPin Id | |
| PortPin Pcr | 017(A0A17) 3249(B0B17 |
这篇关于Autosar_MCAL_Port的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







