本文主要是介绍KUKA机器人KR3 R540维护保养——更换齿形带,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
对KUKA机器人进行维护保养,可以增加机器人的使用寿命,减少故障率。本篇文章的内容是更换KUKA机器人轴齿形带。我们知道机器人长时间运行后,部分轴的齿形带会发生磨损,张力也会发生变化,这时就需要更换齿形带。本篇文章还是以KUKA机器人KR3 R540的A5轴为例,对KUKA机器人更换轴A2、A3、A5齿形带的操作方法进行介绍,有需要的可以参考。
一、前期准备:
1、我们前期需要准备一些工具:开口扳手(7毫米)、内六角梅花扳手、内六角扳手。
2、进行操作之前,先进行防护,比如穿好工作服和劳保鞋,戴上安全帽和手套等。
3、确定A5 和 A6轴无负载;
二、操作步骤:
1、为了安全起见,我们要把机器人的总电源关闭。
2、接下来用T10规格的内梅花扳手将盖罩A5上的4 颗螺丝拧出,放到指定位置,易于保管。它的内部结构如下:

①六角螺栓 M4x16-8.8
②轴 A5 的齿形带
③内六角螺栓 M3x12-10.9
④盖罩 A5
⑤半圆头螺栓 M3x6-10.9 (Torx)5)
3、先用扳手松开电机 A5 上的 2 根内六角螺栓。然后再松开这个六角螺栓,它能调节齿形带的张力。
4、从齿形带轮上取下旧的齿形带A5。然后找个新的齿形带A5装上。要注意齿形带与齿形带齿轮之间要正确啮合。如下图正确的啮合。
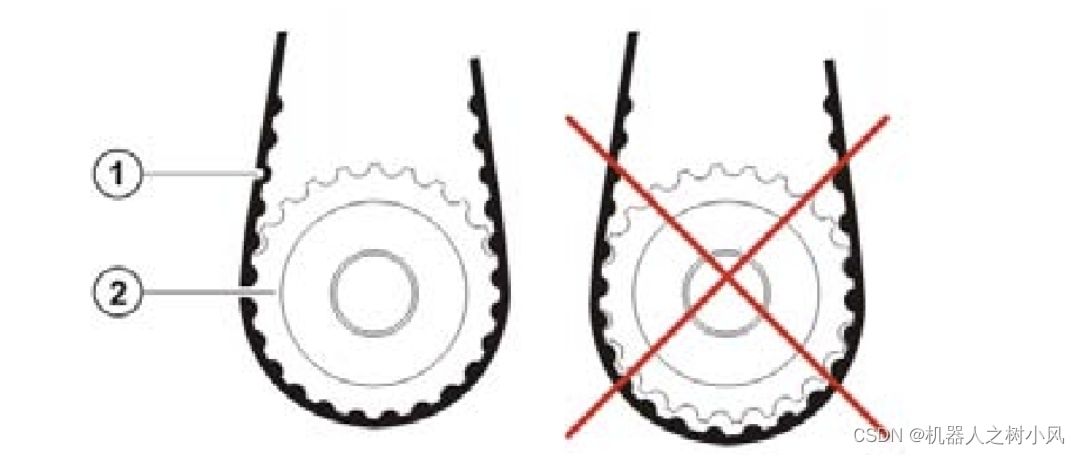
齿形带和齿形带齿轮啮合
① 齿形带 ② 齿形带齿轮
三、对机器人A2、A3轴齿形带的更换方法步骤和以上类似。
这篇关于KUKA机器人KR3 R540维护保养——更换齿形带的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






