kuka专题

kuka编程怎么加中文:解锁KUKA机器人编程中的中文支持
kuka编程怎么加中文:解锁KUKA机器人编程中的中文支持 在工业自动化领域,KUKA机器人以其卓越的性能和广泛的应用而备受赞誉。然而,对于许多中国用户来说,如何在KUKA编程中加入中文支持却成为了一个挑战。本文将从四个方面、五个方面、六个方面和七个方面详细探讨如何在KUKA编程中添加中文,帮助用户更好地利用这一强大工具。 四个方面:KUKA编程中的语言设置与界面选项 首先,我们需要了解KU
KUKA机器人KR3 R540维护保养——更换齿形带
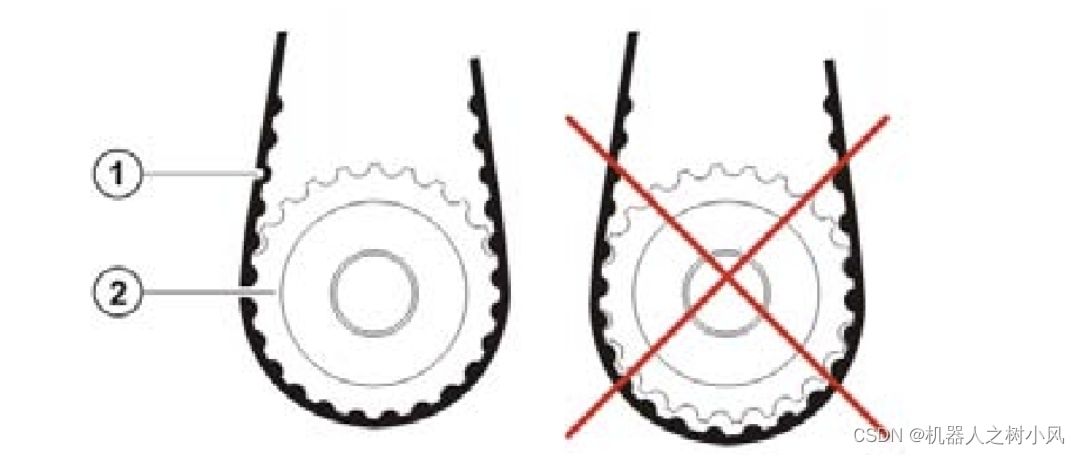
对KUKA机器人进行维护保养,可以增加机器人的使用寿命,减少故障率。本篇文章的内容是更换KUKA机器人轴齿形带。我们知道机器人长时间运行后,部分轴的齿形带会发生磨损,张力也会发生变化,这时就需要更换齿形带。本篇文章还是以KUKA机器人KR3 R540的A5轴为例,对KUKA机器人更换轴A2、A3、A5齿形带的操作方法进行介绍,有需要的可以参考。 一、前期准备: 1、我们前期需要准
KUKA机器人如何给IO信号或寄存器添加中文注释信息?
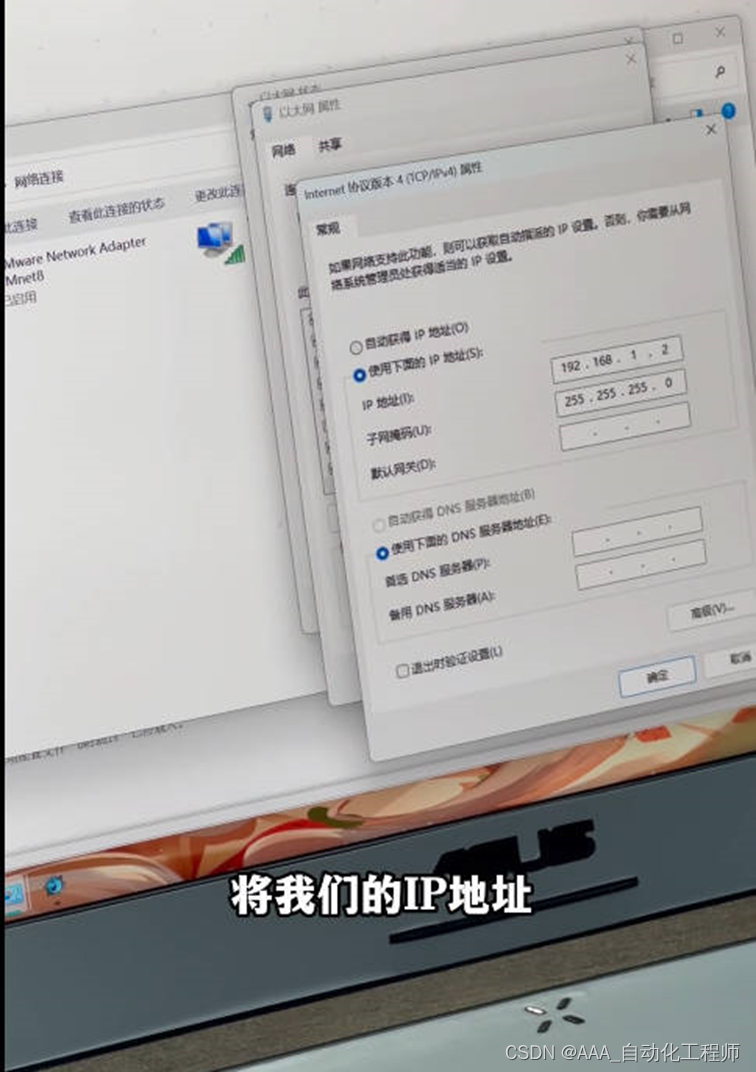
KUKA机器人如何给IO信号或寄存器添加中文注释信息? 如下图所示,首先,我们需要登录专家以上用户权限(默认密码KUKA), 如下图所示,点击“投入运行”—“网络配置”, 如下图所示,此时机器人的IP地址为192.168.1.10, 如下图所示,用一根网线连接机器人控制柜到笔记本电脑上, 如下图所示,设置笔记本电脑当前的网卡的IP地址为192.168.1.2(和机器人的IP地址
KUKA机器人KR3 R540维护保养——涂润滑脂
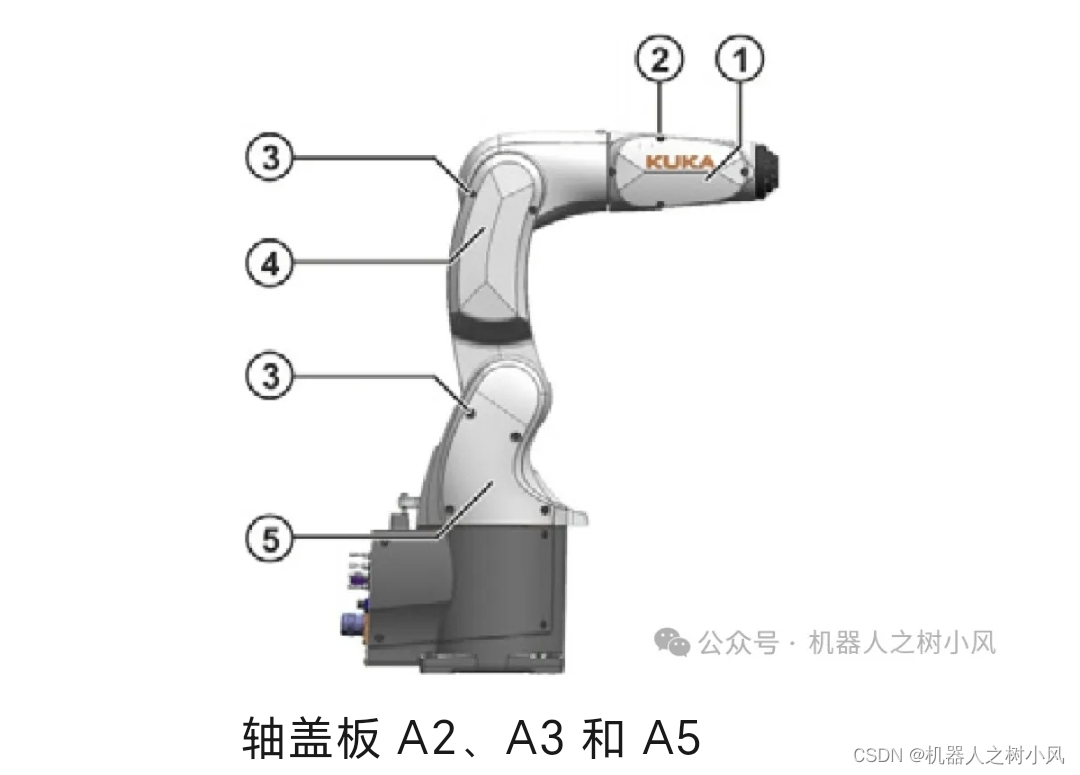
KUKA机器人在保养时少不了润滑脂,不同型号的机器人需要的润滑脂类型也不一样,保养时注意选用合适的润滑脂。本篇文章以KUKA机器人KR3 R540为例,在轴盖板 A2、A3、A5 的内侧涂上润滑脂。 一、涂润滑脂的作用 拆开机器人一个轴的盖板,如A5轴盖板,拆开后可以看出机器人轴盖板内装有一些线缆,当机器人轴在转动过程中这些线缆可能会摩擦到盖板,而在盖板内侧涂上润滑脂就
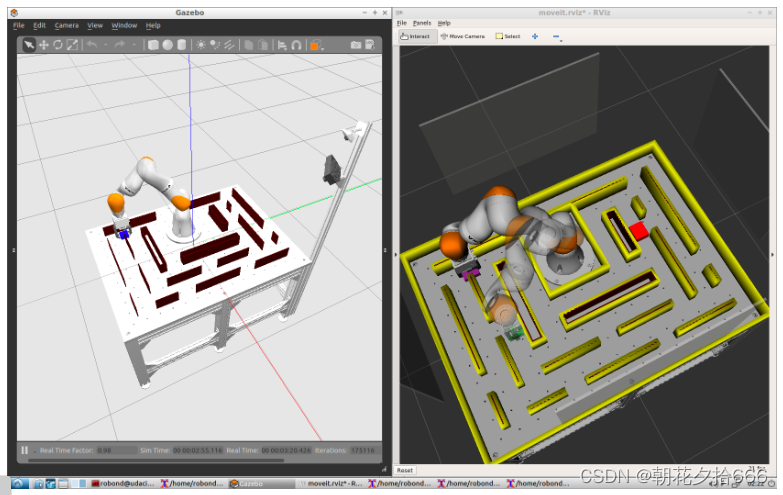
机器人学习之项目- Project5:KUKA Robot Challenge(一)
1.KUKA(库卡)路径规划项目 在这个项目中,给定一个迷宫的开始和目标状态,实现一个路径规划算法来搜索路径,然后在迷宫中的6自由度工业机器人的帮助下,将物体从起点移动到目标状态。 库卡路径规划项目由库卡机器人和卡尔斯鲁厄理工学院(KIT)机器人学习实验室(RLL)合作推出。KUKA Robotics是一家领先的工业机器人制造商,为KIT实验室提供了真实世界的6自由度工业机械臂。 KIT实验
kuka协作机器人LBR系列 issy15R930导入到ros2_rviz(带外观文件)
kuka协作机器人LBR系列 issy15R930导入到ros2_rviz(带外观文件)外观文件未调整好,外观仍需进一步研究,外观文件dae与轮廓(碰撞)文件STL并未完全对应起来。在blender里面看了一下UR机器人的文件,是对应的,本人导出的两种文件总是存在各中角度差。需要进一步研究。 本文参考了以下两篇文章,和UR的包,本文未详细论述的地方,也可以按参考文章中的相关章节

RobotMaster+KUKA——实际工作遇到问题及其解决方案
目录 引出现场反馈问题0度31层整体速度偏慢问题描述问题分析初步解决方案(不治本)可能的解决方案 轨迹问题0度25层,轨迹,点在模具外错误原因分析解决方案 0度27层,轨迹黄色,调整E3轨迹偏移E3 0度34层,A4限位,调整E2问题描述解决方案代码分析 robotmaster配置问题45度 26层 13条轨迹,铺丝头角度不对错误原因分析定位问题解决方案 100度36层,多条轨迹不可达铺
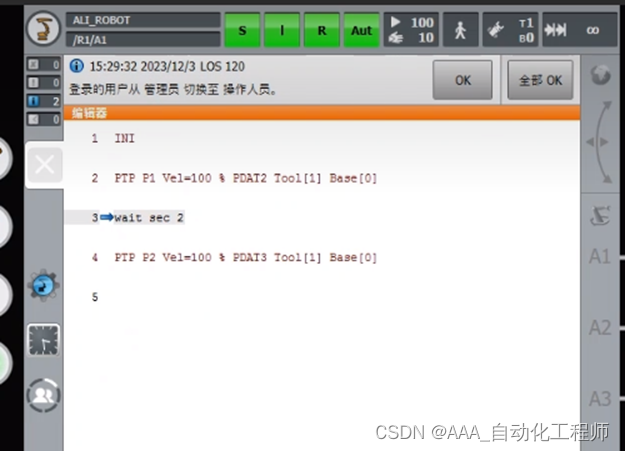
KUKA机器人如何在程序中编辑等待时间?
KUKA机器人如何在程序中编辑等待时间? 如下图所示,如何实现在P1点和P2点之间等待设定的时间? 如下图所示,可以直接输入wait sec 2(等待2秒), 如下图所示,再次选中该程序后,选择“选定”, 如下图所示,执行该程序,可以看到到达P1点之后,会等待2秒,2秒时间到之后才会继续执行下一个动作。
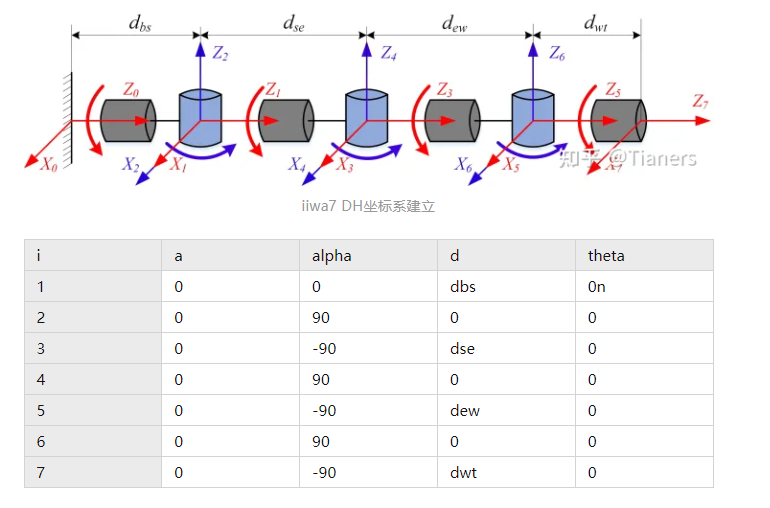
kuka LBR iiwa7 iiwa14机器人参数及MDH表
LBR iiwa 7 R800 CR LBR iiwa 14 R820 CR MDH 懒的麻烦,直接参考Tianers的知乎文:牛顿-欧拉法求解机械臂动力学方程的具体实现过程 数据来源:传送门

KUKA机械手提示参数不等于机器人类型处理
根据该提示有两种处理方式 处理方法一、 在系统变量内进行重新命名赋值具体操作如下: 先切专家权限,然后如上图,在机械手上的 显示 - 变量 - 单个,进入如下界面 该界面为修改变量或监控变量界面首先我们在名称位置填入$Robtrafo [] 然后点击右边的更新这时当前值会提示 “” 表示目前该函数内部值为空 然后继续在下面的新值填入$ Trafoname[]如下图 最后点击右边的设定

KUKA机器人通过直接输入法设定负载数据和附加负载数据的具体操作
KUKA机器人通过直接输入法设定负载数据和附加负载数据的具体操作 设置背景色: 工具负载数据 工具负载的定义: 工具负载数据是指所有装在机器人法兰上的负载。它是另外装在机器人上并由机器人一起移动的质量。需要输入的值有质量、重心位置、质量转动惯量以及所属的主惯性轴。 负载数据必须输入机器人控制系统,并分配给正确的工具。另外,如果负载数据已经传输到机器人控制系统中,则无需再手工输入。
KUKA机器人如何强制输出或取消数字IO信号?
KUKA机器人如何强制输出或取消数字IO信号? 具体的操作方法和步骤可参考以下内容: 如下图所示,点击菜单—显示—输入/输出端, 如下图所示,选择想要查看的信号,这里以数字输出端为例进行说明, 如下图所示,此时可以看到输出端信号的编号、名称和当前值,可以通过下拉滚动条向下翻页查看其他的输出信号, 当我们想要强制输出某个DO时,只需要选中该DO信号,然后按住示教器背后的安全开关,最