本文主要是介绍boxplot analysis,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
最近在摆弄数据离散度的时候遇到一种图形,叫做盒图(boxplot)。它对于显示数据的离散的分布情况效果不错。
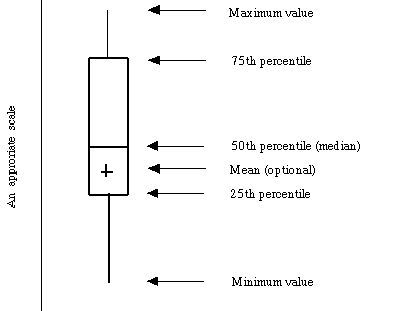
盒图是在1977年由美国的统计学家约翰·图基(John Tukey)发明的。它由五个数值点组成:最小值(min),下四分位数(Q1),中位数(median),上四分位数(Q3),最大值(max)。也可以往盒图里面加入平均值(mean)。如上图。下四分位数、中位数、上四分位数组成一个“带有隔间的盒子”。上四分位数到最大值之间建立一条延伸线,这个延伸线成为“胡须(whisker)”。
由于现实数据中总是存在各式各样地“脏数据”,也成为“离群点”,于是为了不因这些少数的离群数据导致整体特征的偏移,将这些离群点单独汇出,而盒图中的胡须的两级修改成最小观测值与最大观测值。这里有个经验,就是最大(最小)观测值设置为与四分位数值间距离为1.5个IQR(中间四分位数极差)。即
- IQR = Q3-Q1,即上四分位数与下四分位数之间的差,也就是盒子的长度。
- 最小观测值为min = Q1 - 1.5*IQR,如果存在离群点小于最小观测值,则胡须下限为最小观测值,离群点单独以点汇出。如果没有比最小观测值小的数,则胡须下限为最小值。
- 最大观测值为max = Q3 -1.5*IQR,如果存在离群点大于最大观测值,则胡须上限为最大观测值,离群点单独以点汇出。如果没有比最大观测值大的数,则胡须上限为最大值。
通过盒图,在分析数据的时候,盒图能够有效地帮助我们识别数据的特征:
- 直观地识别数据集中的异常值(查看离群点)。
- 判断数据集的数据离散程度和偏向(观察盒子的长度,上下隔间的形状,以及胡须的长度)。
这篇关于boxplot analysis的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!