本文主要是介绍YOLOv9改进策略:卷积魔改 | DCNv4更快收敛、更高速度、更高性能,效果秒杀DCNv3、DCNv2等 ,助力检测 | CVPR2024,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
💡💡💡本文改进内容: DCNv4来自CVPR2024 的论文,它不仅收敛速度明显快于DCNv3,而且正向速度提高了3倍以上。这一改进使DCNv4能够充分利用其稀疏特性,成为最快的通用核心视觉算子之一。
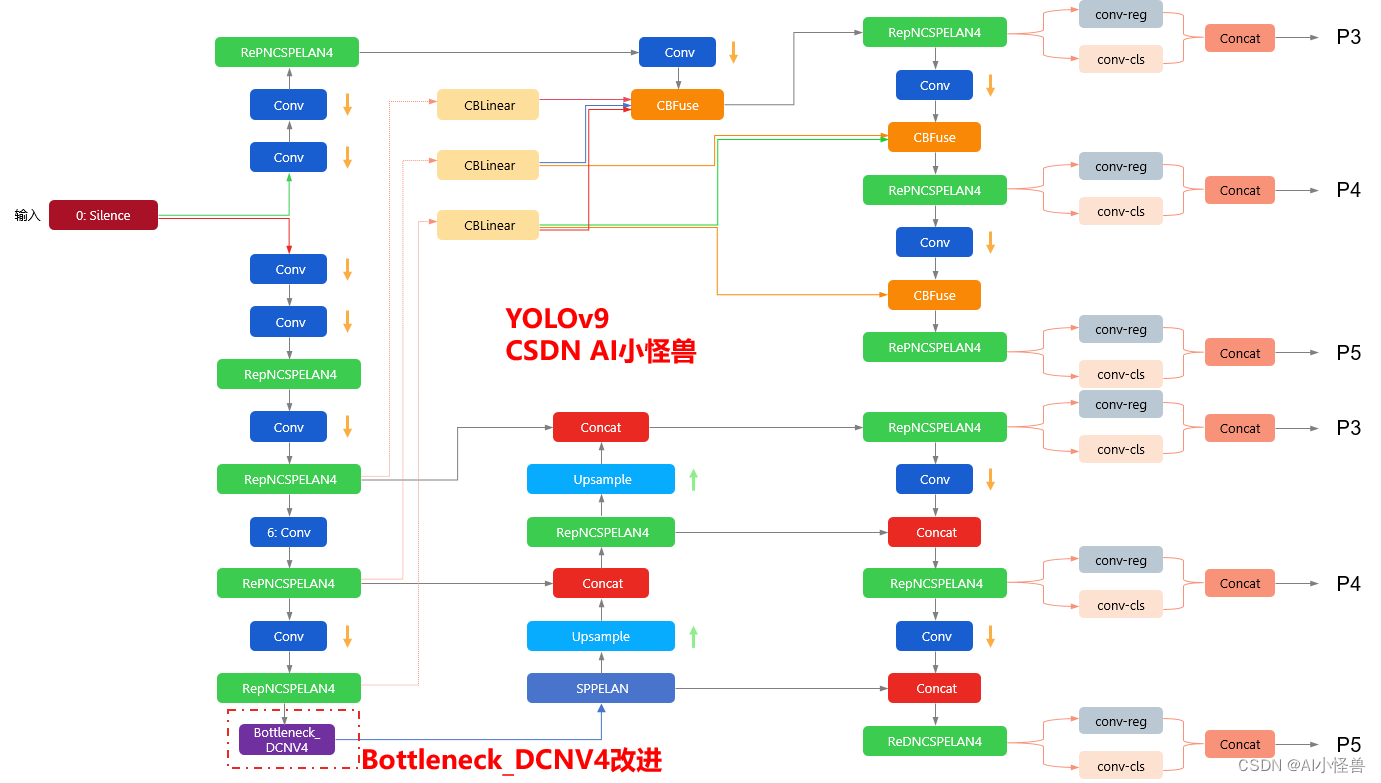
改进结构图如下:

YOLOv9魔术师专栏
☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️ ☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️
包含注意力机制魔改、卷积魔改、检测头创新、损失&IOU优化、block优化&多层特征融合、 轻量级网络设计、24年最新顶会改进思路、原创自研paper级创新等
☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️☁️
✨✨✨ 新开专栏暂定免费限时开放,后续每月调价一次✨✨✨
🚀🚀🚀 本项目持续更新 | 更新完结保底≥50+ ,冲刺100+🚀🚀🚀
🍉🍉🍉 联系WX: AI_CV_0624 欢迎交流!🍉🍉🍉

YOLOv9魔改:注意力机制、检测头、blcok魔改、自研原创等
YOLOv9魔术师
💡💡💡全网独家首发创新(原创),适合paper !!!
💡💡💡 2024年计算机视觉顶会创新点适用于Yolov5、Yolov7、Yolov8等各个Yolo系列,专栏文章提供每一步步骤和源码,轻松带你上手魔改网络 !!!
💡💡💡重点:通过本专栏的阅读,后续你也可以设计魔改网络,在网络不同位置(Backbone、head、detect、loss等)进行魔改,实现创新!!!
1.YOLOv9原理介绍
论文: 2402.13616.pdf (arxiv.org)
代码:GitHub - WongKinYiu/yolov9: Implementation of paper - YOLOv9: Learning What You Want to Learn Using Programmable Gradient Information摘要: 如今的深度学习方法重点关注如何设计最合适的目标函数,从而使得模型的预测结果能够最接近真实情况。同时,必须设计一个适当的架构,可以帮助获取足够的信息进行预测。然而,现有方法忽略了一个事实,即当输入数据经过逐层特征提取和空间变换时,大量信息将会丢失。因此,YOLOv9 深入研究了数据通过深度网络传输时数据丢失的重要问题,即信息瓶颈和可逆函数。作者提出了可编程梯度信息(programmable gradient information,PGI)的概念,来应对深度网络实现多个目标所需要的各种变化。PGI 可以为目标任务计算目标函数提供完整的输入信息,从而获得可靠的梯度信息来更新网络权值。此外,研究者基于梯度路径规划设计了一种新的轻量级网络架构,即通用高效层聚合网络(Generalized Efficient Layer Aggregation Network,GELAN)。该架构证实了 PGI 可以在轻量级模型上取得优异的结果。研究者在基于 MS COCO 数据集的目标检测任务上验证所提出的 GELAN 和 PGI。结果表明,与其他 SOTA 方法相比,GELAN 仅使用传统卷积算子即可实现更好的参数利用率。对于 PGI 而言,它的适用性很强,可用于从轻型到大型的各种模型。我们可以用它来获取完整的信息,从而使从头开始训练的模型能够比使用大型数据集预训练的 SOTA 模型获得更好的结果。对比结果如图1所示。

YOLOv9框架图
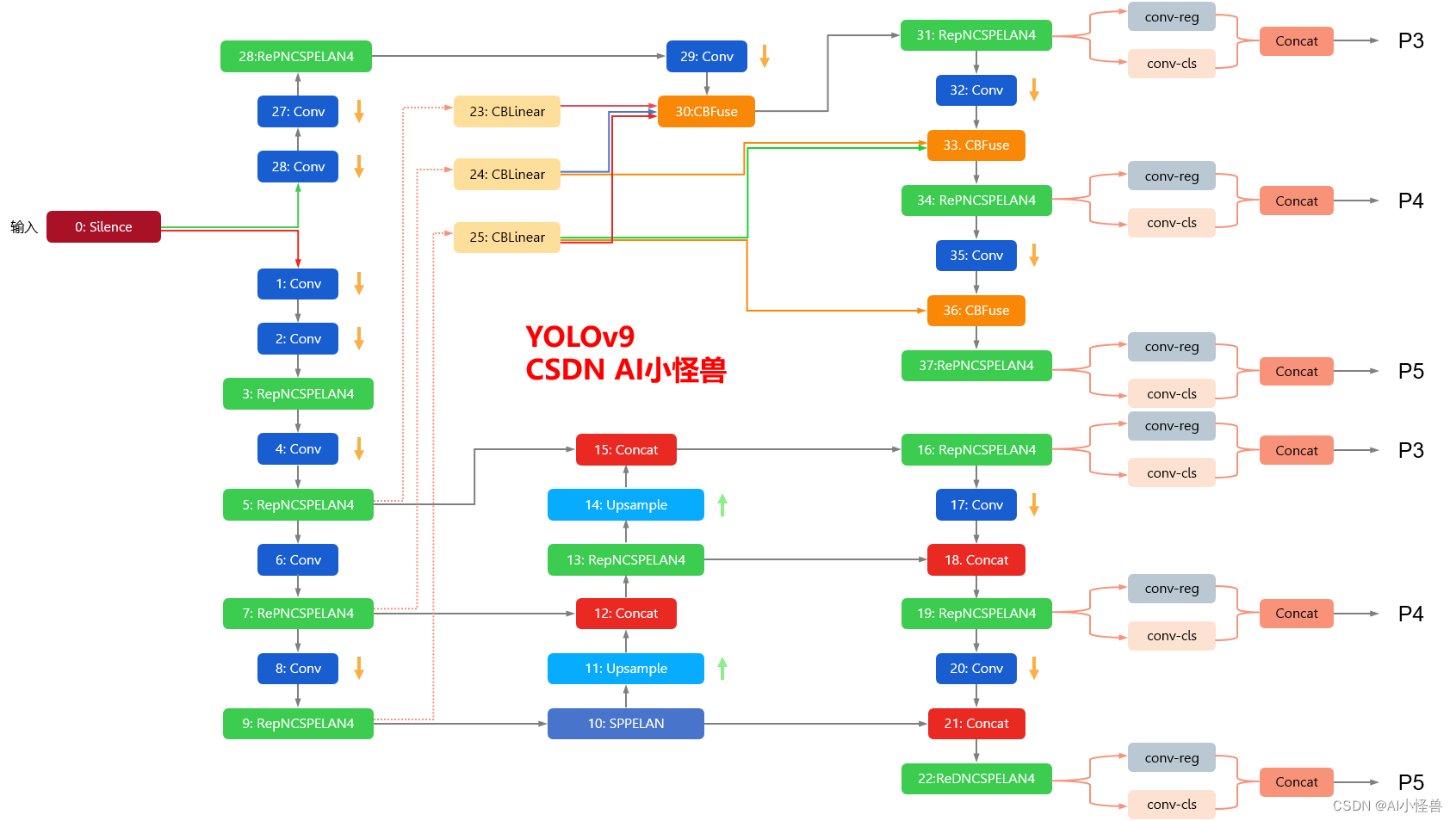
1.1 YOLOv9框架介绍
YOLOv9各个模型介绍

2.DCNv4介绍
论文: https://arxiv.org/pdf/2401.06197.pdf
摘要:我们介绍了可变形卷积v4 (DCNv4),这是一种高效的算子,专为广泛的视觉应用而设计。DCNv4通过两个关键增强解决了其前身DCNv3的局限性:去除空间聚合中的softmax归一化,增强空间聚合的动态性和表现力;优化内存访问以最小化冗余操作以提高速度。与DCNv3相比,这些改进显著加快了收敛速度,并大幅提高了处理速度,其中DCNv4的转发速度是DCNv3的三倍以上。DCNv4在各种任务中表现出卓越的性能,包括图像分类、实例和语义分割,尤其是图像生成。当在潜在扩散模型中与U-Net等生成模型集成时,DCNv4的性能优于其基线,强调了其增强生成模型的可能性。在实际应用中,将InternImage模型中的DCNv3替换为DCNv4来创建FlashInternImage,无需进一步修改即可使速度提高80%,并进一步提高性能。DCNv4在速度和效率方面的进步,以及它在不同视觉任务中的强大性能,显示了它作为未来视觉模型基础构建块的潜力。
图1所示。(a)我们以DCNv3为基准显示相对运行时间。DCNv4比DCNv3有明显的加速,并且超过了其他常见的视觉算子。(b)在相同的网络架构下,DCNv4收敛速度快于其他视觉算子,而DCNv3在初始训练阶段落后于视觉算子。

为了克服这些挑战,我们提出了可变形卷积v4 (DCNv4),这是一种创新的进步,用于优化稀疏DCN算子的实际效率。DCNv4具有更快的实现速度和改进的操作符设计,以增强其性能,我们将详细说明如下:
首先,我们对现有实现进行指令级内核分析,发现DCNv3已经是轻量级的。计算成本不到1%,而内存访问成本为99%。这促使我们重新审视运算符实现,并发现DCN转发过程中的许多内存访问是冗余的,因此可以进行优化,从而实现更快的DCNv4实现。
其次,从卷积的无界权值范围中得到启发,我们发现在DCNv3中,密集关注下的标准操作——空间聚合中的softmax归一化是不必要的,因为它不要求算子对每个位置都有专用的聚合窗口。直观地说,softmax将有界的0 ~ 1值范围放在权重上,并将限制聚合权重的表达能力。这一见解使我们消除了DCNv4中的softmax,增强了其动态特性并提高了其性能。
因此,DCNv4不仅收敛速度明显快于DCNv3,而且正向速度提高了3倍以上。这一改进使DCNv4能够充分利用其稀疏特性,成为最快的通用核心视觉算子之一。
我们进一步将InternImage中的DCNv3替换为DCNv4,创建FlashInternImage。值得注意的是,与InternImage相比,FlashInternImage在没有任何额外修改的情况下实现了50 ~ 80%的速度提升。这一增强定位FlashInternImage作为最快的现代视觉骨干网络之一,同时保持卓越的性能。在DCNv4的帮助下,FlashInternImage显著提高了ImageNet分类[10]和迁移学习设置的收敛速度,并进一步提高了下游任务的性能。
图2。(a)注意力(Attention)和(b) DCNv3使用有限的(范围从0 ~ 1)动态权值来聚合空间特征,而注意力的窗口(采样点集)是相同的,DCNv3为每个位置使用专用的窗口。(c)卷积对于聚合权值具有更灵活的无界值范围,并为每个位置使用专用滑动窗口,但窗口形状和聚合权值是与输入无关的。(d) DCNv4结合两者的优点,采用自适应聚合窗口和无界值范围的动态聚合权值。

图3。说明我们的优化。在DCNv4中,我们使用一个线程来处理同一组中的多个通道,这些通道共享采样偏移量和聚合权重。可以减少内存读取和双线性插值系数计算等工作负载,并且可以合并多个内存访问指令。

3.DCNv4加入到YOLOv9
3.1新建py文件,路径为models/conv/dcnv4.py
后续更新
3.2修改yolo.py
1)首先进行引用
from models.conv.dcnv4 import *2)修改def parse_model(d, ch): # model_dict, input_channels(3)
在源码基础上加入Bottleneck_DCNV4
n = n_ = max(round(n * gd), 1) if n > 1 else n # depth gainif m in {Conv, AConv, ConvTranspose, Bottleneck, SPP, SPPF, DWConv, BottleneckCSP, nn.ConvTranspose2d, DWConvTranspose2d, SPPCSPC, ADown,RepNCSPELAN4, SPPELAN,Bottleneck_DCNV4}:c1, c2 = ch[f], args[0]if c2 != no: # if not outputc2 = make_divisible(c2 * gw, 8)args = [c1, c2, *args[1:]]3.3 yolov9-c-Bottleneck_DCNV4.yaml
# YOLOv9# parameters
nc: 80 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
#activation: nn.LeakyReLU(0.1)
#activation: nn.ReLU()# anchors
anchors: 3# YOLOv9 backbone
backbone:[[-1, 1, Silence, []], # conv down[-1, 1, Conv, [64, 3, 2]], # 1-P1/2# conv down[-1, 1, Conv, [128, 3, 2]], # 2-P2/4# elan-1 block[-1, 1, RepNCSPELAN4, [256, 128, 64, 1]], # 3# avg-conv down[-1, 1, ADown, [256]], # 4-P3/8# elan-2 block[-1, 1, RepNCSPELAN4, [512, 256, 128, 1]], # 5# avg-conv down[-1, 1, ADown, [512]], # 6-P4/16# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 7# avg-conv down[-1, 1, ADown, [512]], # 8-P5/32# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 9[-1, 1, Bottleneck_DCNV4, [512,512]], # 10]# YOLOv9 head
head:[# elan-spp block[-1, 1, SPPELAN, [512, 256]], # 11# up-concat merge[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 7], 1, Concat, [1]], # cat backbone P4# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 14# up-concat merge[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 5], 1, Concat, [1]], # cat backbone P3# elan-2 block[-1, 1, RepNCSPELAN4, [256, 256, 128, 1]], # 17 (P3/8-small)# avg-conv-down merge[-1, 1, ADown, [256]],[[-1, 14], 1, Concat, [1]], # cat head P4# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 20 (P4/16-medium)# avg-conv-down merge[-1, 1, ADown, [512]],[[-1, 11], 1, Concat, [1]], # cat head P5# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 23 (P5/32-large)# multi-level reversible auxiliary branch# routing[5, 1, CBLinear, [[256]]], # 24[7, 1, CBLinear, [[256, 512]]], # 25[9, 1, CBLinear, [[256, 512, 512]]], # 26# conv down[0, 1, Conv, [64, 3, 2]], # 27-P1/2# conv down[-1, 1, Conv, [128, 3, 2]], # 28-P2/4# elan-1 block[-1, 1, RepNCSPELAN4, [256, 128, 64, 1]], # 29# avg-conv down fuse[-1, 1, ADown, [256]], # 30-P3/8[[24, 25, 26, -1], 1, CBFuse, [[0, 0, 0]]], # 31 # elan-2 block[-1, 1, RepNCSPELAN4, [512, 256, 128, 1]], # 32# avg-conv down fuse[-1, 1, ADown, [512]], # 33-P4/16[[25, 26, -1], 1, CBFuse, [[1, 1]]], # 34 # elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 35# avg-conv down fuse[-1, 1, ADown, [512]], # 36-P5/32[[26, -1], 1, CBFuse, [[2]]], # 37# elan-2 block[-1, 1, RepNCSPELAN4, [512, 512, 256, 1]], # 38# detection head# detect[[32, 35, 38, 17, 20, 23], 1, DualDDetect, [nc]], # DualDDetect(A3, A4, A5, P3, P4, P5)]3.4 如何编译dcnv4
源码下载
下载链接:GitHub - OpenGVLab/DCNv4: [CVPR 2024] Deformable Convolution v4
将 DCNv4_op文件夹放入models\nn目录下

在DCNv4_op文件夹下执行以下命令:
python setup.py build install编译通过

3.5 报错解决
报错如下
output = ext.dcnv4_forward(*args)
RuntimeError: Not implemented on the CPU if isinstance(m, (DualDetect, TripleDetect, DualDDetect, TripleDDetect)):s = 256 # 2x min stridem.inplace = self.inplace#forward = lambda x: self.forward(x)[0][0] if isinstance(m, (DualSegment, DualPanoptic)) else self.forward(x)[0]forward = lambda x: self.forward(x)[0]m.stride = torch.tensor([s / x.shape[-2] for x in forward(torch.zeros(1, ch, s, s))]) # forward# check_anchor_order(m)# m.anchors /= m.stride.view(-1, 1, 1)self.stride = m.stridem.bias_init() # only run once m.stride = torch.tensor([s / x.shape[-2] for x in forward(torch.zeros(1, ch, s, s))]) # forward替换为
self.model.to(torch.device('cuda'))m.stride = torch.tensor([s / x.shape[-2] for x in forward(torch.zeros(1, ch, s, s).to(torch.device('cuda')))]) # forwardself.model.cpu()3.6 实验中,待更新
这篇关于YOLOv9改进策略:卷积魔改 | DCNv4更快收敛、更高速度、更高性能,效果秒杀DCNv3、DCNv2等 ,助力检测 | CVPR2024的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







