本文主要是介绍股票交易中的卡尔曼滤波器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

一、说明
将卡尔曼滤波用在股市预测,是一个高水平的数学模型。其中首先要吃透啥叫卡尔曼滤波,然后才能应用到股市。股市数据最大的看点在于,诱因太多,以至于不可测。有随机性,但不属于任何分布。有时一段看似平稳过程,但突然之间跌宕起伏。属于数据中最难驾驭的,构成一种挑战。本文论述如何使用卡尔曼分解股市要素。
卡尔曼滤波器。来源:[1]
二、什么是卡尔曼滤波器?
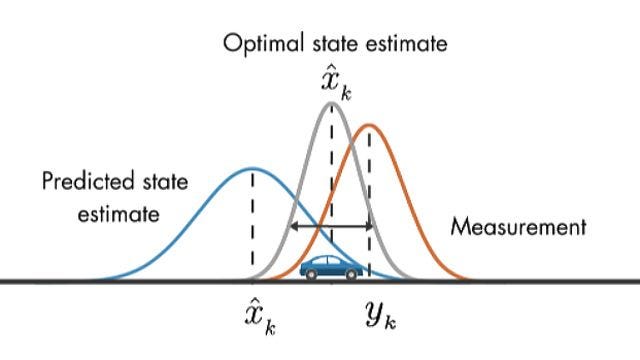
鉴于测量结果会受到噪声的影响,卡尔曼滤波器 (KF) 算法可以恢复被跟踪的底层对象的真实状态。该算法有两个步骤:预测步骤和测量更新步骤。该滤波器结合了噪声传感器的测量结果和基于物理的模型的预测(例如,速度*时间给出距离)以提供最佳估计。让我们尝试使用 GPS 传感器来估计汽车的位置。众所周知,GPS 传感器无法准确预测车辆的位置(这对于自动驾驶汽车等安全关键型应用至关重要),我们的目标是预测车辆的实际位置。
这篇关于股票交易中的卡尔曼滤波器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







