本文主要是介绍机器人在果园内行巡检仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 创建工作空间
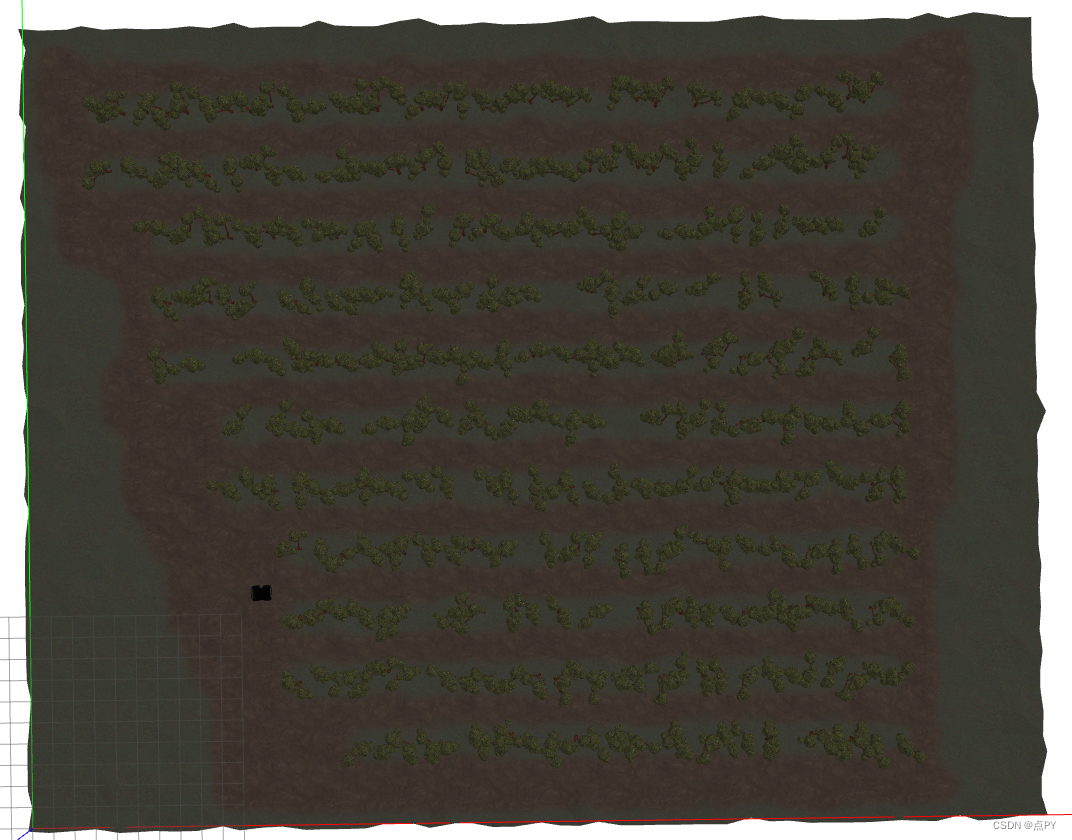
- 仿真果园场景搭建
- 小车模型搭建
- 将机器人放在仿真世界中
创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws
仿真果园场景搭建
cd ~/catkin_ws/src
git clone https://gitcode.com/clearpathrobotics/cpr_gazebo.git
小车模型搭建
DiffBot是一种具有两个轮子的自主差动驱动机器人。它的主要处理单元是一个运行Ubuntu Mate 20.04和ROS 1 (ROS Noeti
这篇关于机器人在果园内行巡检仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








