本文主要是介绍FedAsync Asynchronous Federated Optimization,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- Introduction
- Methodology
- Convergence analysis
- Experiments
Introduction
联邦学习有三个关键属性:
- 不频繁的任务激活。对于弱边缘设备,学习任务只在设备空闲、充电、连接非计量网络时执行.
- 沟通不频繁。边缘设备和远程服务器之间的连接可能经常不可用、缓慢或昂贵(就通信成本或电池电量使用而言)。
- 非iid训练数据。对于联邦学习,不同设备上的数据是不相交的,因此可能代表来自总体的非相同分布的样本。
存在的问题:
- 联邦学习通常是使用同步方法实现的,由于离散者的存在,同步方法可能会很慢。当处理大量边缘设备时,可能会有大量的掉队者。由于不同设备的可用性和完成时间不同,由于计算能力和电池时间的限制,全局同步是困难的,特别是在联邦学习场景中。
解决方案:
- 异步训练[9,14,15]被广泛应用于传统的分布式随机梯度下降(SGD)算法中,以解决离散者和异构延迟问题[9,14,15]。在本文中,我们利用异步训练的优势,并将其与联邦优化相结合。提出了一种新的异步联邦优化算法。关键思想是:
- 解决正则化的局部问题以保证收敛性;
- 然后使用加权平均来更新全局模型,其中混合权值作为过时性的函数自适应设置。
本文贡献:
- 提出了一种新的异步联邦优化算法和原型系统设计。
- 我们证明了该方法对于一类受限的非凸问题的收敛性。
- 我们提出了控制由异步引起的错误的策略。为此,我们引入了一个混合超参数,该参数可以自适应地控制收敛速度和方差减少之间的权衡。
- 我们的经验表明,所提出的算法收敛速度快,并且在实际设置中通常优于同步联邦优化。
Methodology
服务器和工作器异步地进行更新,也就是说,服务器在接收到本地模型时立即更新全局模型。服务器和工作线程之间的通信是非阻塞的。因此,服务器和工作人员可以随时更新模型而不需要同步,这对于设备具有异构条件时是有利的。

- 在服务器端,调度器和更新程序异步并行运行。调度程序周期性地触发训练任务,并控制训练任务的延迟(更新t-T)
- 更新器从worker接收模型并更新全局模型。我们的架构允许在全局模型上使用读写锁的多个更新线程,这提高了吞吐量。
- 更新全局模型时,更大的过时性会导致更大的错误。
- 对于陈旧度较大(t−τ)的局部模型,我们可以减小α来减轻陈旧度带来的误差。
- 如算法1所示,我们可以选择使用函数s(t−τ)来确定α的值。一般来说,当t = τ时,s(t−τ)应为1,当(t−τ)增大时,s(t−τ)单调减小。

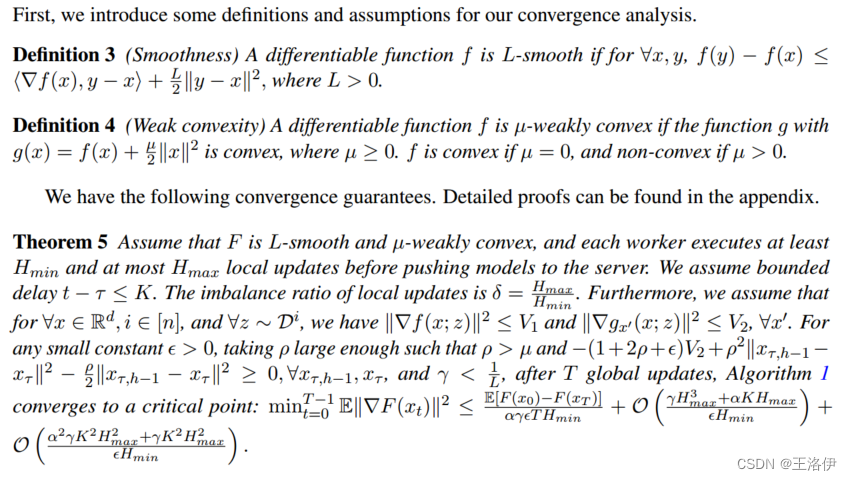
Convergence analysis
收敛性证明,有心情的时候再看
Experiments
数据集:CIFAR-10和WikiText-2。训练集被划分为n=100个设备。小批量大小分别为50和20。
基线算法是引入的FedAvg,它实现了同步联邦优化。对于fedag,在每个epoch中,随机选择k = 10个设备启动本地更新。我们还将单线程SGD作为基准。对于FedAsync,我们通过从均匀分布中随机采样陈旧度(t−τ)来模拟异步。
我们用不同的学习率γ、正则化权值ρ、混合超参数α和过时性来测试FedAsync
这篇关于FedAsync Asynchronous Federated Optimization的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!

![[论文笔记]Circle Loss: A Unified Perspective of Pair Similarity Optimization](/front/images/it_default.jpg)