本文主要是介绍基于粒子群优化算法的图象聚类识别matlab仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1.程序功能描述
2.测试软件版本以及运行结果展示
3.核心程序
4.本算法原理
5.完整程序
1.程序功能描述
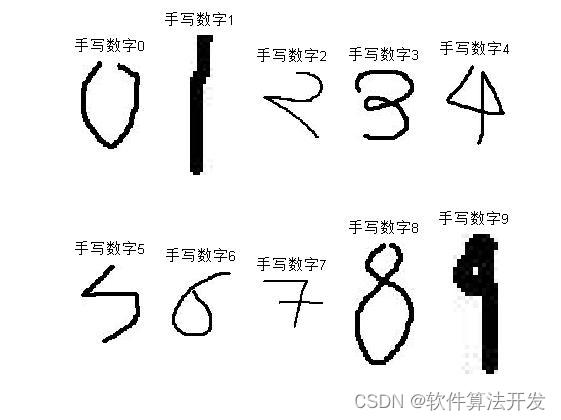
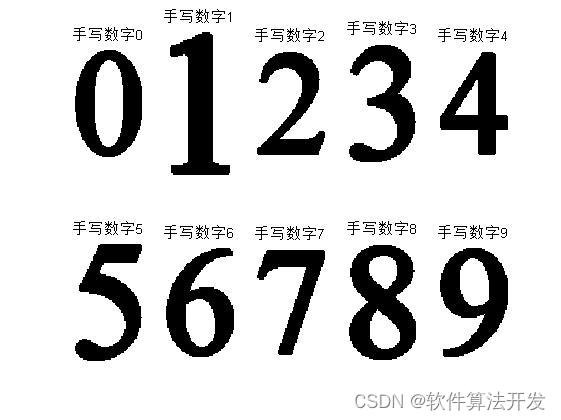
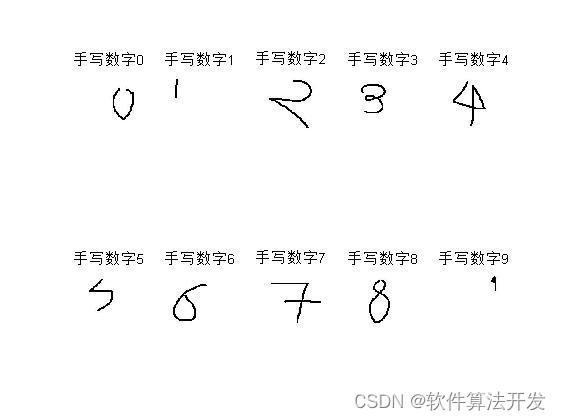
基于粒子群优化算法的图象聚类识别。通过PSO优化方法,将数字图片的特征进行聚类,从而识别出数字0~9.
2.测试软件版本以及运行结果展示
MATLAB2017B版本运行

3.核心程序
..............................................................
%参数初始化
global Nwidth;
global Nwidth2;centerNum = 4; %聚类中心数
level = 5; %图片的分割数
patternNum = level*2*level+1;
d = 10; %十个数字,如果是n张图片,那么就d = n;%step1:图片读取
[Y1,Y2,Y3,Y4,Y5,Y6,Y7,Y8,Y9,Y0,T1,T2,T3,T4,T5,T6,T7,T8,T9,T0] = func_readimages();%step2:特征的提取
func_feature_catch(level,Y1,Y2,Y3,Y4,Y5,Y6,Y7,Y8,Y9,Y0,T1,T2,T3,T4,T5,T6,T7,T8,T9,T0);%step3:获取特征库
[m_pattern,vector,vector2] = pattern(patternNum);
Nwidth = size(m_pattern,1);
Nwidth2 = size(m_pattern,1);%step4:粒子群聚类模块调用
%以下是你提供的代码的修正
% iterNum = 20; %迭代次数
% particleNum = 100; %初始化粒子数
% [m_pattern,Particle] = C_PSO(m_pattern,patternNum,centerNum,iterNum,Nwidth,Nwidth2,particleNum);%以下是我们提供的代码粒子群聚类代码
particleNum = 50;
iterNum = 300;
[fljg,fg,bfit,ws,cen]=C_PSO2(vector',particleNum,iterNum,centerNum);
%聚类结果分析
figure;
disp('最优聚类输出:');
fljg
disp('最优适应度输出:');
fg
plot(bfit,'r-*');title('最优适应度轨迹');
hold on;
plot(1:length(bfit),fg,'b-.');
legend('最优适应度轨迹','最优适应度');%以下是我们提供的代码粒子群聚类代码
particleNum = 50;
iterNum = 300;
[fljg,fg,bfit,ws,cen]=C_PSO2(vector2',particleNum,iterNum,centerNum);
%聚类结果分析
figure;
disp('最优聚类输出:');
fljg
disp('最优适应度输出:');
fg
plot(bfit,'r-*');title('最优适应度轨迹');
hold on;
plot(1:length(bfit),fg,'b-.');
legend('最优适应度轨迹','最优适应度');
06_003m4.本算法原理
粒子群优化(Particle Swarm Optimization, PSO)算法是一种模拟鸟群捕食行为的优化搜索算法,它通过群体中个体之间的信息共享和协作来实现问题的求解。在图像聚类识别中,PSO算法可以用于寻找最佳的聚类中心,从而提高聚类的准确性和效率。
粒子群优化是一种基于群体的优化技术,灵感来自鸟群或鱼群的社会行为。在PSO中,每个解决方案被看作是搜索空间中的一个“粒子”。每个粒子都有自己的位置和速度,这些位置和速度会根据粒子自己的经验和邻居粒子的经验来更新。
假设我们有M个粒子,每个粒子i在D维搜索空间中具有一个位置向量X_i(t)和一个速度向量V_i(t),其中t表示迭代次数。
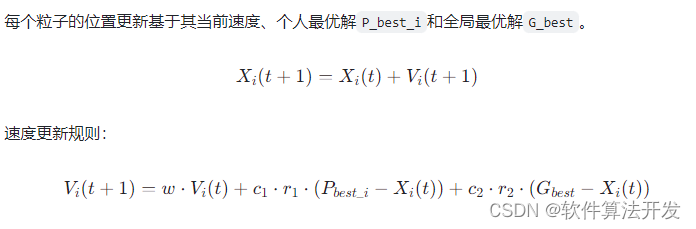
w是惯性权重,控制全局搜索与局部搜索的平衡。
c_1和c_2是加速常数(认知系数和社会系数),通常为正实数。
r_1和r_2是在[0, 1]区间内随机生成的数值,用于引入随机性。
将图像数据预处理后转换为特征向量,然后利用PSO寻找这些特征向量在高维空间的最佳划分边界或聚类中心。对于每一轮迭代,粒子位置代表不同的聚类中心候选方案,通过评估各个方案的聚类效果来更新粒子的速度和位置,最终得到合适的聚类中心集合并完成图像聚类识别任务。
在图像聚类识别中,我们可以将图像的每个像素看作是一个数据点,并使用聚类算法将这些数据点划分成不同的类别。PSO算法可以用于优化聚类中心的选择,从而提高聚类的效果。
具体步骤如下:
- 初始化粒子群,每个粒子的位置表示一组聚类中心;
- 计算每个粒子的适应度值,即聚类效果的评价指标(如类内距离和、类间距离比等);
- 根据适应度值更新每个粒子的个体最优位置和全局最优位置;
- 使用速度更新公式和位置更新公式更新粒子的速度和位置;
- 重复步骤2-4直到满足停止条件(如达到最大迭代次数或适应度值达到预设阈值);
- 输出全局最优位置作为最终的聚类中心,并使用这些聚类中心对图像进行聚类识别。
5.完整程序
VVV
这篇关于基于粒子群优化算法的图象聚类识别matlab仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








