本文主要是介绍归一化八点算法及图像之间基础矩阵求解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
归一化8点算法及图像之间基础矩阵求解
文章目录
- 归一化8点算法及图像之间基础矩阵求解
- 归一化8点算法介绍
- 归一化8点算法步骤
- 归一化8点算法总结
- 对极几何与基础矩阵
- 实验详细需求
- 实验过程及代码
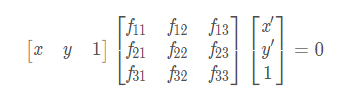
- (1)左右拍摄,极点位于图像平面上。
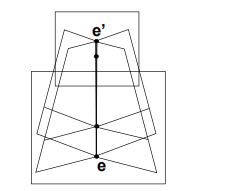
- (2)像平面接近平行,极点位于无穷远,如图所示
- (3)图像拍摄位置位于前后,如图所示
多视图几何时利用在不同视点所拍摄图像间的关系,来研究照相机之间或者特征之间关系的一门科学。多视图几何中最重要的内容是双视图几何。如果有一个场景的两个视图以及视图中的对应图像点,那么根据照相机的空间相对位置关系、照相机的性质以及三维场景点的位置,可以得到对这些图像点的一些几何关系约束。
归一化8点算法介绍
基本矩阵是由下述方程定义:
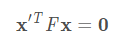
其中x↔x’x↔x′是两幅图像的任意一对匹配点。由于每一组点的匹配提供了计算F系数的一个线性方程,当给定至少7个点(3×3)的齐次矩阵减去一个尺度,以及一个秩为2的约束),方程就可以计算出未知的FF。我们记点的坐标为x=(x,y,1)T,x’=(x’,y’,1)Tx=(x,y,1) T,x′=(x′,y′,1) T,则对应的方程为:
展开后有:

把矩阵F写成列向量的形式,则有:

给定n组点的集合,我们有如下方程:

如果存在确定(非零)解,则系数矩阵AA的秩最多是8。由于F是齐次矩阵,所以如果矩阵A的秩为8,则在差一个尺度因子的情况下解是唯一的。可以直接用线性算法解得。
如果由于点坐标存在噪声则矩阵A的秩可能大8(也就是等于9,由于A是n×9的矩阵)。这时候就需要求最小二乘解,这里就可以用SVD来求解,ff的解就是系数矩阵A最小奇异值对应的奇异向量,也就是A奇异值分解后A=UDVT
中矩阵V的最后一列矢量,这是在解矢量ff在约束‖f‖下取‖Af‖最小的解。以上算法是解基本矩阵的基本方法,称为8点算法。
归一化8点算法步骤
由于基本矩阵有一个重要的特点就是奇异性,F矩阵的秩是2。如果基本矩阵是非奇异的,那么所计算的对极线将不重合。所以在上述算法解得基本矩阵后,会增加一个奇异性约束。最简便的方法就是修正上述算法中求得的矩阵F。设最终的解为F′ ,令detF′=0下求得Frobenius范数(二范数)‖F−F ′‖最小的F′F′ 。这种方法的实现还是使用了SVD分解,若F=UDV ,此时的对角矩阵D=diag(r,s,t),满足r≥s≥t,则F′=Udiag(r,s,0)VT 最小化范数‖F−F′‖,也就是最终的解。
所以8点算法由下面两个步骤组成:
1.求线性解 由系数矩阵AA最小奇异值对应的奇异矢量ff求的FF。
2.奇异性约束 是最小化Frobenius范数∥F−F′∥‖F−F′‖的F′F′代替FF。
归一化8点算法总结
8点算法是计算基本矩阵的最简单的方法。为了提高解的稳定性和精度,往往会对输入点集的坐标先进行归一化处理。在MVG的估计一章中推荐各向同性归一化,OpenCV的8点算法也是使用了各向同性,也就是使得各个点做平移缩放之后到坐标原点的均方根距离等于2–√ 2 。
对于归一化八点算法的总结如下:
给定n≥8n≥8组对应点xi↔x′i ,确定基本矩阵FF使得x’TiFxi=0x
算法:
1.归一化:根据xˆi=Txi,xˆ′i=T′x′i ,变换图像坐标。其中T和T′ 是有平移和缩放组成的归一化变换。
2.求解对应匹配的基本矩阵F’。
1.求线性解:用由对应点集xˆi↔xˆ′i 确定的系数矩阵Aˆ 的最小奇异值的奇异矢量确定Fˆ。
2.奇异性约束:用SVD对Fˆ 进行分解,令其最小奇异值为0,得到Fˆ′ 使得detF’=0。
3.解除归一化:令F=T’TFˆ′T。矩阵F就是数据xi↔x′i 对应的基本矩阵。
通常SVD算法来计算最小二乘法,由于上面的算法得出的解可能秩不为2(基础矩阵的秩小于等于2),所以需要通过最后一个奇异值置0来得到秩最接近2的基础矩阵。上面的函数忽略了一个重要的步骤:对图像坐标进行归一化,这可能会带来数值问题。
八点算法的优点:
线性求解,容易实现,运行速度快 。
八点算法的缺点:
对噪声敏感。
对极几何与基础矩阵
基本矩阵体现了两视图几何(对极几何,epipolar geometry)的内在射影几何(projective geometry)关系,基本矩阵只依赖于摄像机的内部参数K和外部参数R、t
对极平面 = 包含基线的平面
对极线 = 对极平面与像平面的交线
对极点= 基线与像平面相交点= 光心在另一幅图像中的投影
基础矩阵是对极几何的代数表达方式
基础矩阵描述了图像中任意对应点 x↔x’ 之间的约束关系

F 为 3x3 矩阵,秩为2,对任意匹配点对 x↔x’ 均满足xTFx’=0
- 转置: 如果 F 是表述点对 (x, x’)之间的基础矩阵, 则 FT 表述点对 (x’,x)之间的基础矩阵;
- 对极线: F 可以将点 x 映射到对应像平面上一条线 l=Fx’,同理可得 l’=FTx
- 对极点: 对于所有对极线, 有 eTFx’=0, 全x’ →eTF=0, 同理有 Fe’=0
- F 自由度为 7 , i.e. 3x3-1(homogeneous)-1(rank2)
实验详细需求
分别用七点、八点、十点(匹配点),计算基础矩阵
图片包含三种情况,即:
(1)左右拍摄,极点位于图像平面上,如图所示
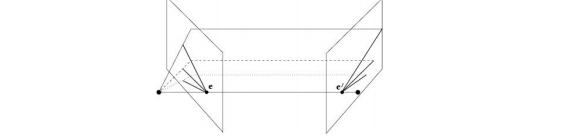
(2)像平面接近平行,极点位于无穷远,如图所示
(3)图像拍摄位置位于前后,如图所示
针对上述情况,画出极点和极线,其中点坐标要均匀分布于各行
实验过程及代码
我是用了SIFT对两个图像进行特征提取以及匹配,然后使用归一化8点算法进行基本矩阵的求解。
代码实现:
# coding: utf-8
from PIL import Image
from numpy import *
from pylab import *
import numpy as np
from PCV.geometry import homography, camera,sfm
from PCV.localdescriptors import siftcamera = reload(camera)
homography = reload(homography)
sfm = reload(sfm)
sift = reload(sift)# 提取特征
im1 = array(Image.open('D:/test/test5/7.jpg'))
sift.process_image('D:/test/test5/7.jpg', 'im1.sift')im2 = array(Image.open('D:/test/test5/8.jpg'))
sift.process_image('D:/test/test5/8.jpg', 'im2.sift')l1, d1 = sift.read_features_from_file('im1.sift')
l2, d2 = sift.read_features_from_file('im2.sift')matches = sift.match_twosided(d1, d2)ndx = matches.nonzero()[0]
x1 = homography.make_homog(l1[ndx, :2].T)#将点集转化为齐次坐标表示
ndx2 = [int(matches[i]) for i in ndx]
x2 = homography.make_homog(l2[ndx2, :2].T)#将点集转化为齐次坐标表示d1n = d1[ndx]
d2n = d2这篇关于归一化八点算法及图像之间基础矩阵求解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





