本文主要是介绍3D Deeply Supervised Network for Automatic Liver Segmentation from CT Volumes-笔记,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
网络结构:
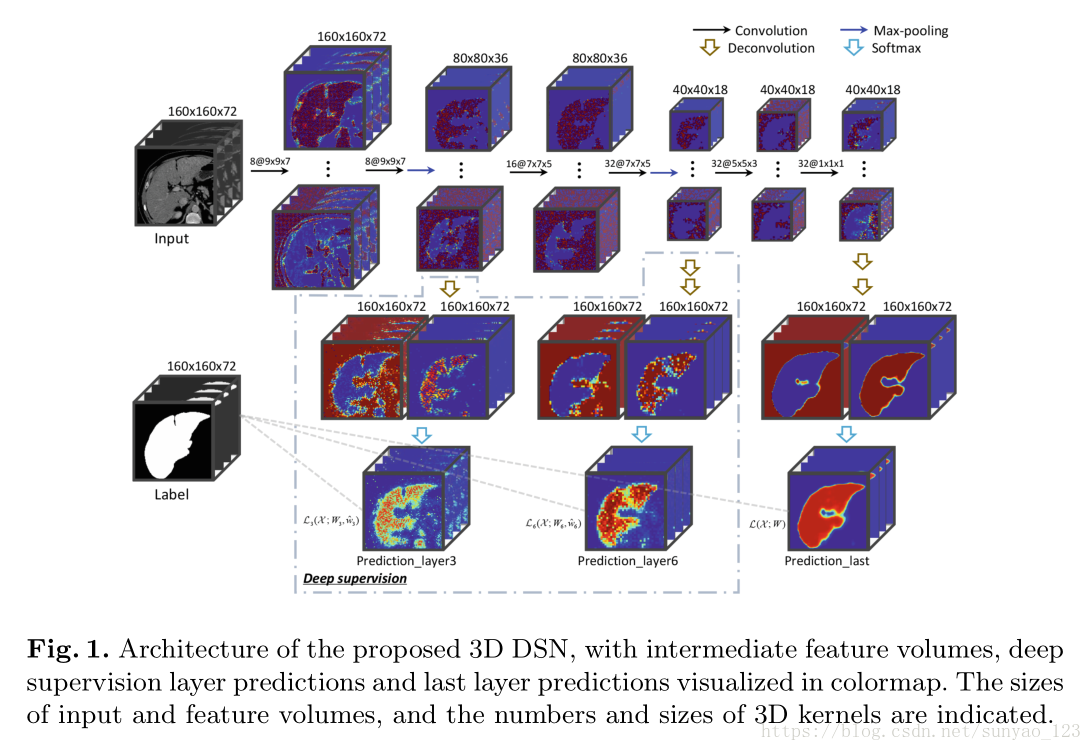
网络改进的地方是通过反卷积(核大小为3X3X3,步长为2)中间层,使得和输入大小相同,然后通过label计算loss,和最终loss一起进行梯度更新。中间反卷积层输出的loss可以防止梯消失。(深度监督DSN)
由于最终输出是通过反卷积得到的,只通过阈值生成结果,有时后边缘会不精确。所以在横断面又使用了CRF。
观察了中间层的输出:证明该论文的中间层学习到的表达相关性较小(特征没有冗余)。
优化过程较难。解决办法就是在不同的中间层通过反卷积后,和label计算loss,进行反向传播。值得一说的是该论文使用的损失函数,有俩部分组成:1,3个输出对应类别概率的negative-log likelihood loss;2,对所有权重使用正则化,使用l_2正则化(因为会过拟合)。公式如下:

ηd表示前两个输出(被称为深度监督)的对应的平衡权重,在训练过程中下降,上式第一项为最后一个输出(第3个)的损失。
训练:权重初始化,高斯分布(μ = 0,σ = 0.01)。初始学习率为0.1,每50个周期下降10倍。深度监督平衡权重初始化为0.3和0.4,每10个周期下降5%。
评价标准:
volumetric overlap error (VOE[%]), relative volume difference (VD[%]), average symmetric surface distance (AvgD[mm]), root mean square symmetric surface distance (RMSD[mm]) and maximum symmetric surface distance (MaxD[mm]).
CRF
这篇关于3D Deeply Supervised Network for Automatic Liver Segmentation from CT Volumes-笔记的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







