本文主要是介绍基于PPNSA+扰动算子的车间调度最优化matlab仿真,可以任意调整工件数和机器数,输出甘特图,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1.程序功能描述
2.测试软件版本以及运行结果展示
3.核心程序
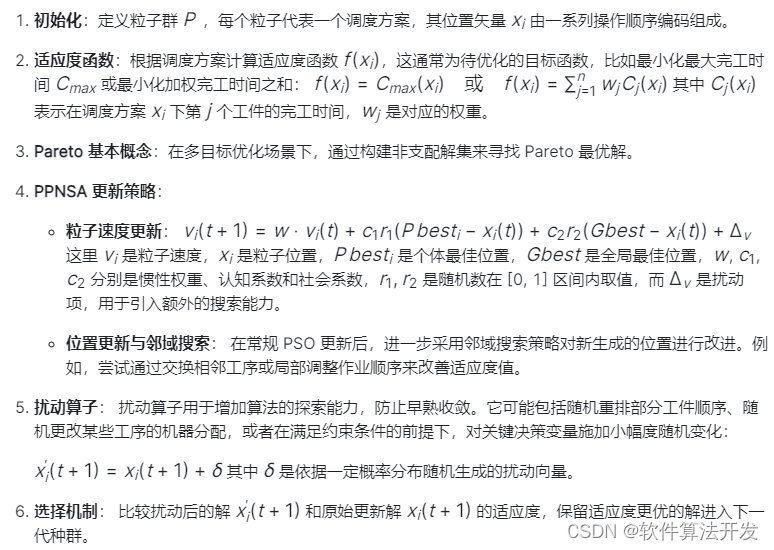
4.本算法原理
5.完整程序
1.程序功能描述
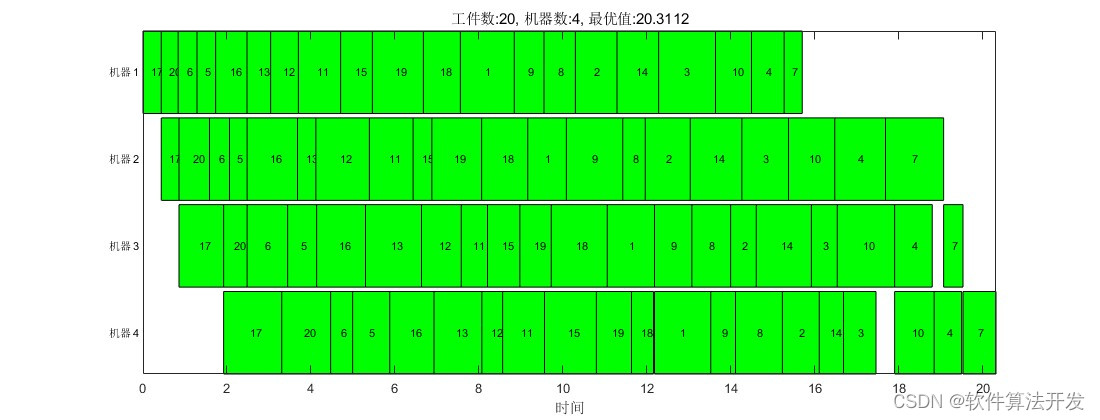
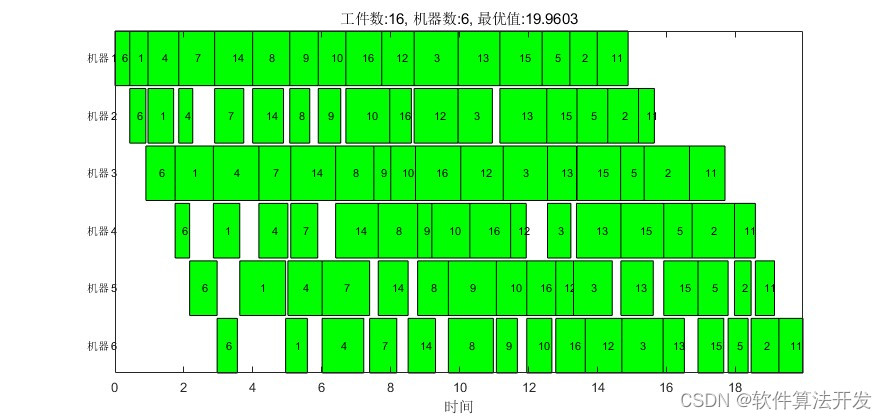
基于PPNSA+扰动算子的车间调度最优化matlab仿真,可以任意调整工件数和机器数,输出甘特图和优化收敛曲线。
2.测试软件版本以及运行结果展示
MATLAB2022a版本运行
3.核心程序
..................................................................
[Xs,ff] = func_initial(T,Npop);
fout = zeros(Iters,1); for i = 1:Itersi[ff,I] = sort(ff,'descend');Xs = Xs(I,:);Pmax = Xs(1,:);Fmax = ff(1);%子种群for j = 1:Pop_nPops = Xs(j:Pop_n:end,:); ff_ = ff(j:Pop_n:end,:);[Popss,F3] = func_FLA(T,Pops,ff_,Pmax,Fmax);Xs(j:Pop_n:end,:) = Popss;ff(j:Pop_n:end,:) = F3;end% 进化结果评估[Xsolve,ybest] = func_Eval(Xs,ff);fout(i) = -mean(ybest);
endfigure
[Fouts,Etime] = func_fitness(T,Xsolve);
Stime = Etime-T(:,Xsolve); % 开始时间
fval = -Fouts;
M1 = size(T,1); % 行数M1为机器数
NX = length(Xsolve); % 列数NX为工件数
for i = 1:M1for j = 1:NXx1 = Stime(i,j);x2 = Etime(i,j);y1 = i-1;y2 = i-0.05;fill([x1 x2 x2 x1],[y1 y1 y2 y2],[0,1,0]);text(x1*0.55+x2*0.45,(y1+y2)/2,[num2str(Xsolve(j))],'Fontsize',8,'Color','k');hold on;endtext(-0.8,(y1+y2)/2,['机器 ',num2str(i)],'Fontsize',8,'Color','k');
endhold off;
xlabel('时间');
set(gca,'ytick',[],'YDir','reverse','Color',[1 1 1]);
axis([0 fval 0 M1-0.05]);
title(['工件数:',num2str(NX),', 机器数:',num2str(M1),', 最优值:',num2str(fval)]);figure;
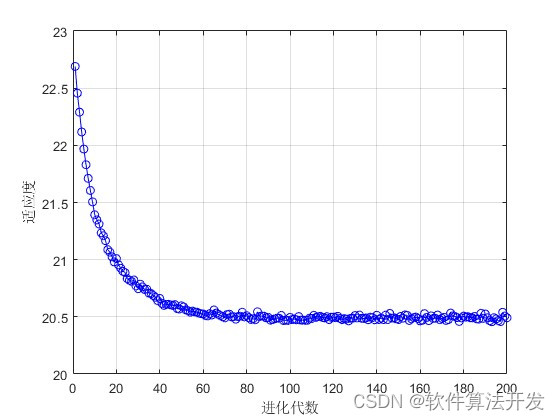
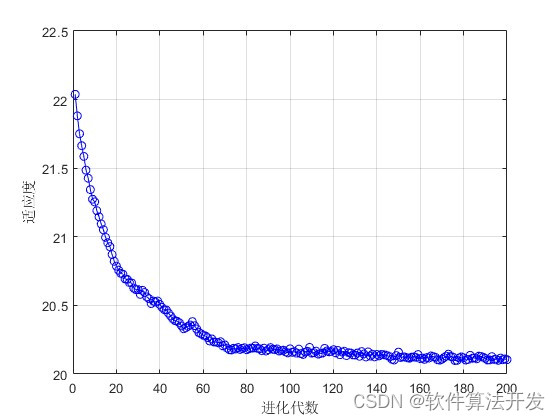
plot(1:Iters,fout(1:end),'b-o');
grid on;
xlabel('进化代数');
ylabel('适应度');
284.本算法原理
车间调度问题(Job Shop Scheduling Problem, JSSP)是制造业中非常关键的一类优化问题。它涉及到多个工件在多个机器上的加工顺序安排,目标通常是最小化完成所有工件的总时间,即最小化最大完工时间(Makespan)。由于JSSP具有NP难的特性,传统的优化方法往往难以在合理时间内找到最优解。因此,启发式算法和元启发式算法成为了解决这类问题的主流方法。
5.完整程序
VVV
这篇关于基于PPNSA+扰动算子的车间调度最优化matlab仿真,可以任意调整工件数和机器数,输出甘特图的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









