工件专题

提高加工中心工件精度的方法
任何加工设备,在工件加工时如加工路线设置、加工程序编制、加工刀具选择、机床自身问题、装夹问题及工件材质等有问题时,对工件终的加工精度和加工效率都会造成一定的影响,五轴加工中心作为高精、减少工件加工误差常用的方法主要有减少原始误差法、误差补偿法、误差转移法、误差分组法、误差平均法及误差合成法等。具体操作方法如下: 提高加工中心工件精度的方法: 1、误差合成法。消除机床自身的误差是保证工件终加工精
单机调度问题(第i工件的完工时间=加工时间+等待时间)
第08章 制造系统的调度控制 - 百度文库 (baidu.com) 模拟退火单机极小化总流水时间的排序问题_哔哩哔哩_bilibili 在单机调度问题中,工件的完工时间是一个至关重要的指标,因为它直接反映了生产效率的高低。而完工时间的计算,必须同时考虑工件的加工时间和等待时间,因为这两者共同决定了工件在机器上的整体处理时间。 加工时间,是工件在机器上进行实际加工所需的时间,这是由工
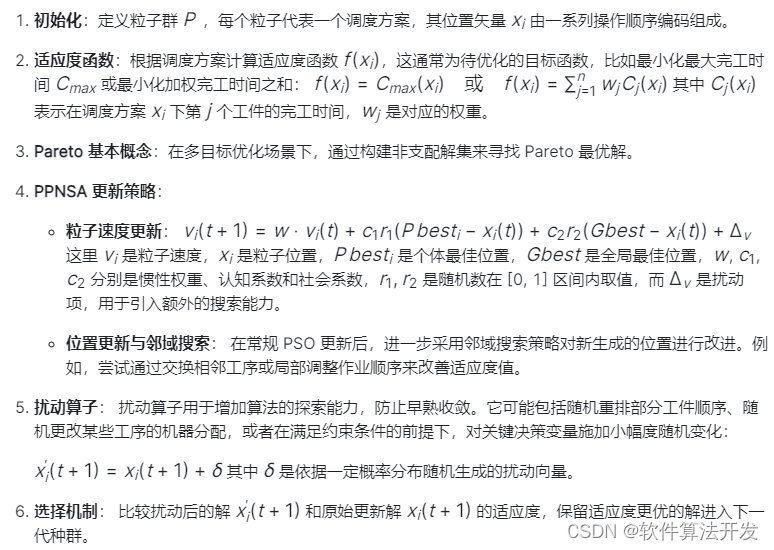
基于PPNSA+扰动算子的车间调度最优化matlab仿真,可以任意调整工件数和机器数,输出甘特图
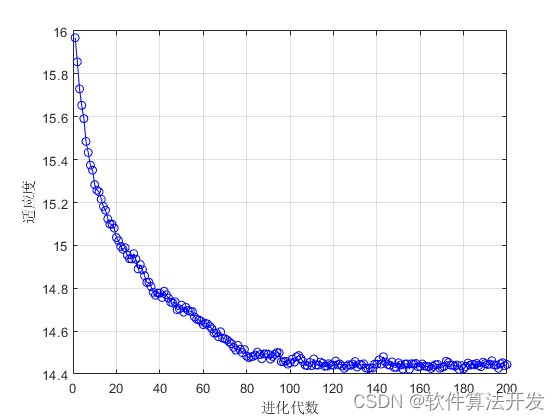
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.本算法原理 5.完整程序 1.程序功能描述 基于PPNSA+扰动算子的车间调度最优化matlab仿真,可以任意调整工件数和机器数,输出甘特图和优化收敛曲线。 2.测试软件版本以及运行结果展示 MATLAB2022a版本运行 3.核心程序 ............
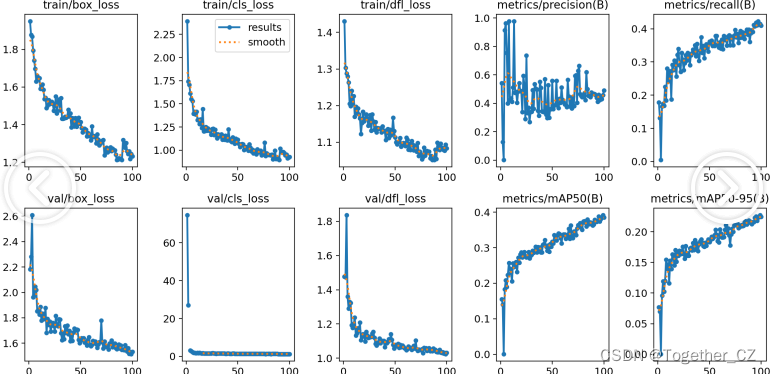
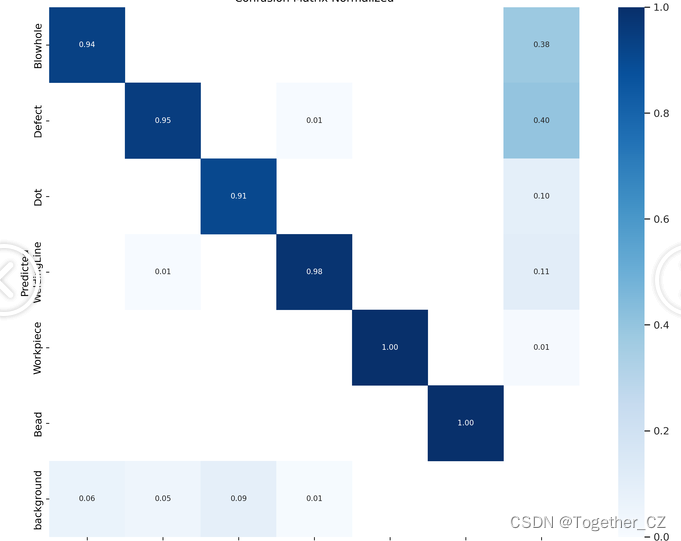
助力焊接场景下自动化缺陷检测识别,基于YOLOv8【n/s/m/l/x】全系列参数模型开发构建工件表面焊接裂纹缺陷检测识别分析系统
焊接是一个不陌生但是对于开发来说相对小众的场景,在工件表面焊接场景下常常有对工件表面缺陷智能自动化检测识别的需求,工业AI结合落地是一个比较有潜力的场景,在我们前面的博文开发实践中也有一些相关的实践,感兴趣的话可以自行移步阅读即可: 《轻量级模型YOLOv5-Lite基于自己的数据集【焊接质量检测】从零构建模型超详细教程》 《基于DeepLabV3Plus实现焊缝分割识别系统》 《基于官方Y
助力焊接场景下自动化缺陷检测识别,基于YOLOv8【n/s/m/l/x】全系列参数模型开发构建工业焊接场景下工件表面焊接缺陷检测识别分析系统
焊接是一个不陌生但是对于开发来说相对小众的场景,在工件表面焊接场景下常常有对工件表面缺陷智能自动化检测识别的需求,工业AI结合落地是一个比较有潜力的场景,在我们前面的博文开发实践中也有一些相关的实践,感兴趣的话可以自行移步阅读即可: 《轻量级模型YOLOv5-Lite基于自己的数据集【焊接质量检测】从零构建模型超详细教程》 《基于DeepLabV3Plus实现焊缝分割识别系统》 《基于官方Y
基于自适应遗传算法的车间调度matlab仿真,可以任意调整工件数和机器数,输出甘特图
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.本算法原理 4.1 编码与初始化 4.2 适应度函数 4.3 遗传操作 4.4 自适应机制 4.5 终止条件 5.完整程序 1.程序功能描述 基于自适应遗传算法的车间调度matlab仿真,可以任意调整工件数和机器数,输出甘特图和优化算法的适应度收敛曲线。 2.测试软件版本以
2024年PMP考试新考纲-PMBOK第七版-【模型、方法和工件】真题解析(2)
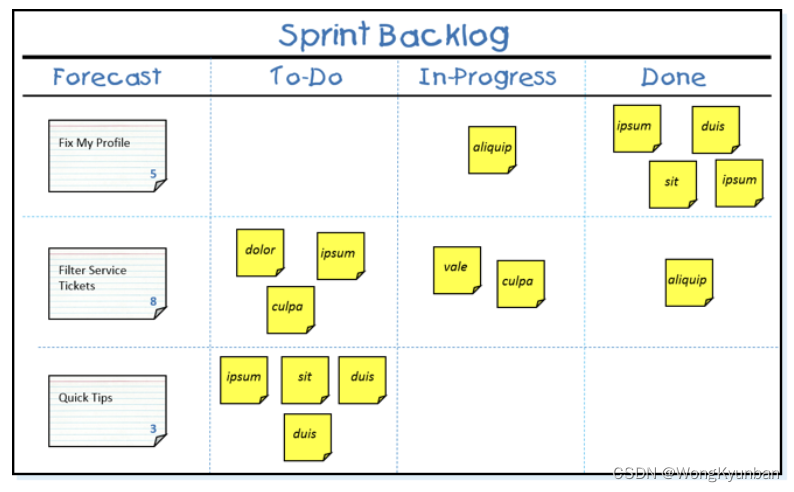
今天我们继续来看第七版PMBOK第四部分【模型、方法和工件】这个章节相关的真题。 实际上在做题的时候,可能有的小伙伴会发现,这部分和第六版PMBOK中散落在各个知识领域的题目很相似。没错!在之前版本的PMBOK中,很经典的框架是每个过程(第六版PMBOK有49个过程)都有一个ITTO——即输入、工具与技术、输出,这里面可以粗略地与第七版PMBOk的模型、方法、工件画一个等号。 当然,实际做题的
2024年PMP考试新考纲-PMBOK第七版-【模型、方法和工件】真题解析
今天我们继续来看第七版PMBOK的考题,前面已经介绍了新考纲下最近几年价值交付系统、项目管理原则、项目绩效域、裁剪方面的部分真题和详细解析,今天来看PMBOK第七版的第四部分【模型、方法和工件】这个章节相关的真题。 PMBOK第七版中专门把模型、方法和工件作为了单独的一章介绍,但是本质上除了增加了一些模型、方法和工件外,没有什么特别的之处。里面经典的模型、方法和工件仍然会经常考到,但是新出现的也

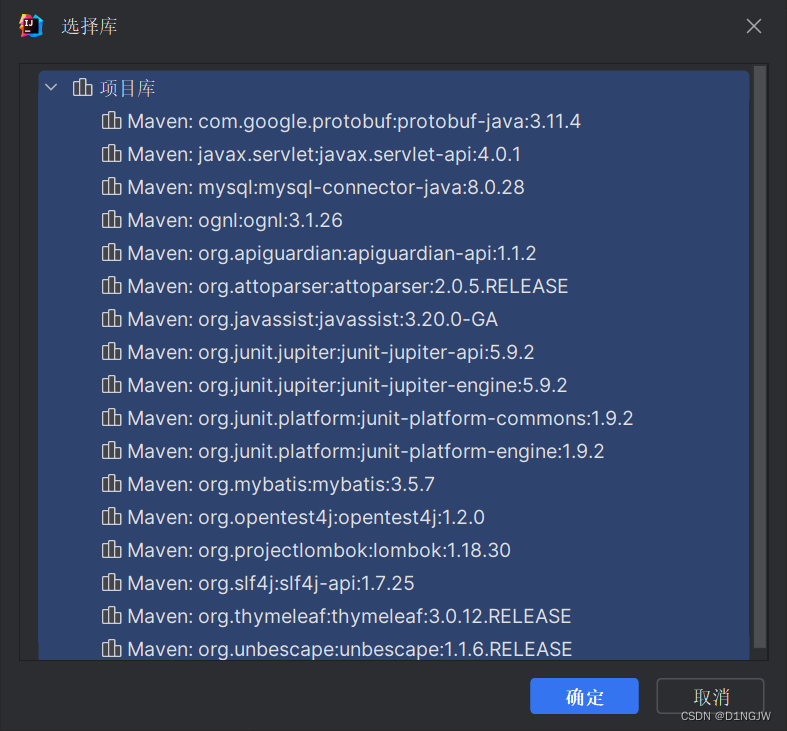
在Idea中创建基于工件的本地服务
目录 1、创建基于工件的Tomcat服务器: 2、修改名称: 3、修改服务器项: 4、部署项 5、最后记得点右下角的【应用】和【确定】保存。 1、创建基于工件的Tomcat服务器: 运行->编辑配置->【Tomcat服务器】->本地 2、修改名称: 与项目名称同名-【项目名称】 3、修改服务器项: 3.1、URL:http://localhost:8086/【项目

【原创创新点】金属工件缺陷检测系统:Efficient Multi-Scale-Conv的改进YOLOv8
1.研究背景与意义 项目参考AAAI Association for the Advancement of Artificial Intelligence 研究背景与意义:金属工件是现代工业生产中不可或缺的重要组成部分。金属工件的质量和性能直接影响到产品的品质和效率,因此对金属工件的研究和改进具有重要的意义。随着科技的不断进步和工业的发展,对金属工件的要求也越来越高,传统的金属加工方法已经无法
点云从入门到精通技术详解100篇-基于三维点云的工件曲面轮廓检测与机器人打磨轨迹规划(下)
目录 4.3 机器人打磨轨迹规划 4.3.1 机器人运动学建模与分析 4.3.2 机器人轨迹规划算法
点云从入门到精通技术详解100篇-基于三维点云的工件曲面轮廓检测与机器人打磨轨迹规划(下)
目录 4.3 机器人打磨轨迹规划 4.3.1 机器人运动学建模与分析 4.3.2 机器人轨迹规划算法
点云从入门到精通技术详解100篇-基于三维点云的工件曲面轮廓检测与机器人打磨轨迹规划(中)
目录 2.2.2 散乱点云滤波去噪 2.2.3 海量点云数据压缩 2.3 点云采集与预处理实验

德国制造Kasite浮动去毛刺主轴——为您解决机械手各种工件精密加工去毛刺技术难题
德国制造Kasite浮动去毛刺主轴尖端技术方案 德国制造Kasite浮动去毛刺主轴——为您解决机械手各种工件精密加工去毛刺技术难题采用径向和轴向柔性浮动系统 + 高速电主轴4036DC-T 柔性系统的优点: -适用于机械手加工各种工件 -灵活性 -利用气压无级调节接触压力 -各个方向保持接触压力保证各个位置加工后表面光滑 -使用于各种机器人或者固定加工单元 高速电主轴优点: -速度高达 60 0

servlet不能映射为一个url模式、启动子级时出错、工件 request:war: 部署工件时出错。请参阅服务器日志了解详细信息解决方案
测试response时出现这样的情况,网上说删除这个文件再Maven刷新,但是不可行 然后我仔细检查了一下代码,发现我犯了一个低级错误,因为Demo3是直接复制Demo2的,所以访问路径忘了修改 跟Demo2的一样,所以报错,修改后就可以正常运行了!
Idea JavaWeb项目,继承自HttpFilter的过滤器,启动Tomcat时部署工件出错
JDK版本:1.8 Tomcat版本:8.5 10-Oct-2023 13:55:17.586 严重 [RMI TCP Connection(3)-127.0.0.1] org.apache.catalina.core.StandardContext.startInternal One or more Filters failed to start. Full details will be
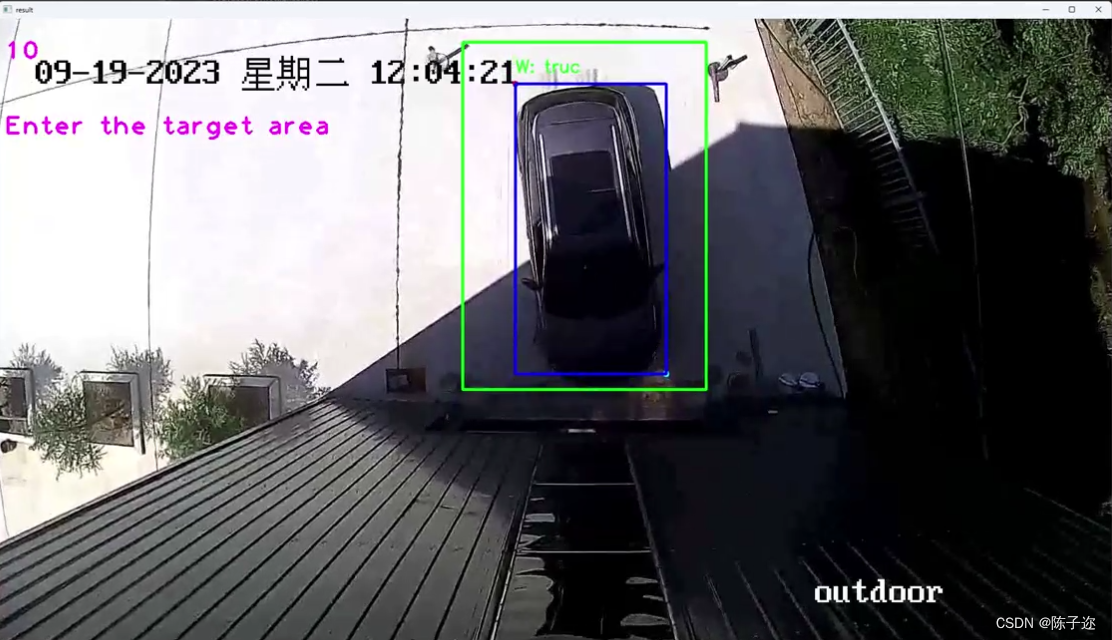
基于YOLO算法的单目相机2D测量(工件尺寸和物体尺寸)三
1.简介 1.1 2D测量技术 基于单目相机的2D测量技术在许多领域中具有重要的背景和意义。 工业制造:在工业制造过程中,精确测量是确保产品质量和一致性的关键。基于单目相机的2D测量技术可以用于检测和测量零件尺寸、位置、形状等参数,进而实现自动化生产和质量控制。通过实时监测并反馈测量结果,可以快速发现和纠正生产中的偏差,提高产品的一致性和合格率。 计算机视觉:单目相机作为计算机视觉的传感器
Idea JavaWeb项目,继承自HttpFilter的过滤器,启动Tomcat时部署工件出错
JDK版本:1.8 Tomcat版本:8.5 10-Oct-2023 13:55:17.586 严重 [RMI TCP Connection(3)-127.0.0.1] org.apache.catalina.core.StandardContext.startInternal One or more Filters failed to start. Full details will be

自动影像仪 工件轮廓尺寸检测仪 2D光学影像测量仪
【品牌】中天智能 【型号】MV200 【机架】大理石平台 【定位方式】图像坐标系定位 【测量硬件】大视野远心镜头 【相机】1200万像素 【视野】200*150mm 【测量原理】远心无畸变测量 【测量尺寸】同时测量100个尺寸 【设备精度】±0.003mm 【操作简单性】简单(10分钟内上手) 【气源】0.6mpa 【设备尺寸(长*宽*高)】900*650*2065mm 【重量】约800kg