本文主要是介绍垃圾分拣小车视觉识别方案,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
第九届全国大学生光电设计竞赛 赛题 2 光电智能垃圾分拣车
竞赛说明:
设计一款光电智能垃圾分拣车,能够从指定位置出发,快速搜寻垃圾,发现 垃圾后对垃圾识别分类,并根据垃圾类别拣送到指定的垃圾堆放地。按照规定时 间内准确分拣的数量确定比赛名次。
目录
- 软件方案
- 硬件方案
- jetson nano上部署自己训练的yolov5模型
软件方案
软件选择以开源项目yolov5为基础进行二次开发,开源地址https://github.com/ultralytics/yolov5
何为yolov5?
yolov5 是视觉物体检测的一个开源项目,可以实现对画面中特定物体的检测,其效果入下图
、
、
、

‘
’
‘
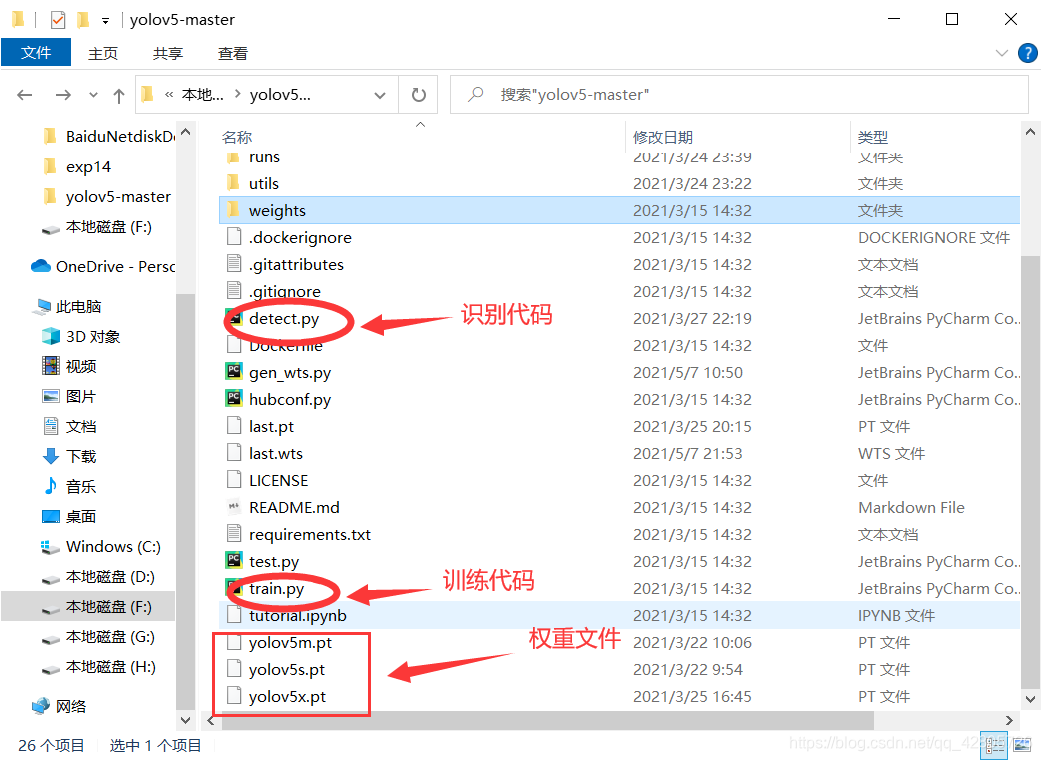
Yolov5官方代码中,给出的目标检测网络中一共有4个版本,分别是Yolov5s、Yolov5m、Yolov5l、Yolov5x四个模型,这些模型的区别在于精确度和系统的开销。其文件结构

导入这些模型我们就可以对模型中定义的80种物体进行检测。运行yolov5需要进行环境搭建,可以参考这里。
对于要识别特定的物体,我们需要训练自己和模型。我们需要一定数量包含我们要识别物体的图片,我们需要对图片中我们要识别的物体进行标注,这里我们用到标注软件labelImg。具体用法自行百度。
开源地址https://github.com/tzutalin/labelImg
具体训练方法见其他博文,可参考这里。
但训练对电脑的硬件要求比较高,我的电脑是不能训练,我是用矩池云GPU训练的,用游戏本的同学应该是可以训练,可以试一下。
硬件方案
硬件可以考虑使用jetson nano,需要自己安装系统,可以在英伟达官网下载好系统镜像后用balenaEtcher写入sd卡。硬件的可选有很多,主要考虑是价格,如果不考虑价格当然是越贵性能越好。

jetson nano上部署自己训练的yolov5模型
这里我们可以参考这篇博文
这篇关于垃圾分拣小车视觉识别方案的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






