本文主要是介绍(二)基于wpr_simulation 的Ros机器人运动控制,gazebo仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、创建工作空间
mkdir catkin_ws
cd catkin_ws
mkdir src
cd src二、下载wpr_simulation源码
git clone https://github.com/6-robot/wpr_simulation.git
三、编译
- ~/catkin_make 目录下catkin_make
- source devel/setup.bash
四、运行
roslaunch wpr_simulation wpb_simple.launch

启动另一个终端,执行:
rosrun rqt_robot_steering rqt_robot_steering
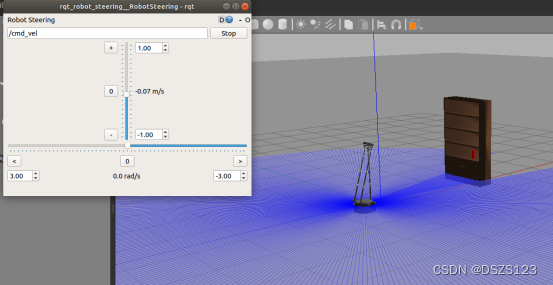
鼠标改变速度和角度值,仿真机器人发生位姿变化。
这篇关于(二)基于wpr_simulation 的Ros机器人运动控制,gazebo仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




