本文主要是介绍三相异步电机动态数学模型推导及矢量控制仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- **原文链接,点击跳转**
- 三相异步电机动态数学模型及矢量控制仿真
- 1、异步电机三相方程
- 2、坐标变换
- 3、磁链3/2变换推导
- 4、两相静止坐标系下的方程
- 5、两相旋转坐标系下的方程
- 6、以 ω-is-Ψr 为状态变量的状态方程
- 7、矢量控制及 matlab 仿真
原文链接,点击跳转
三相异步电机动态数学模型及矢量控制仿真
本文带你一步步推倒三相异步电机动态数学模型,按基于转子磁链定向的矢量控制进行 matlab 仿真,实现较好的控制效果。
1、异步电机三相方程
2、坐标变换
3、磁链3/2变换推导
4、两相静止坐标系下的方程
5、两相旋转坐标系下的方程
6、以 ω-is-Ψr 为状态变量的状态方程
7、矢量控制及 matlab 仿真
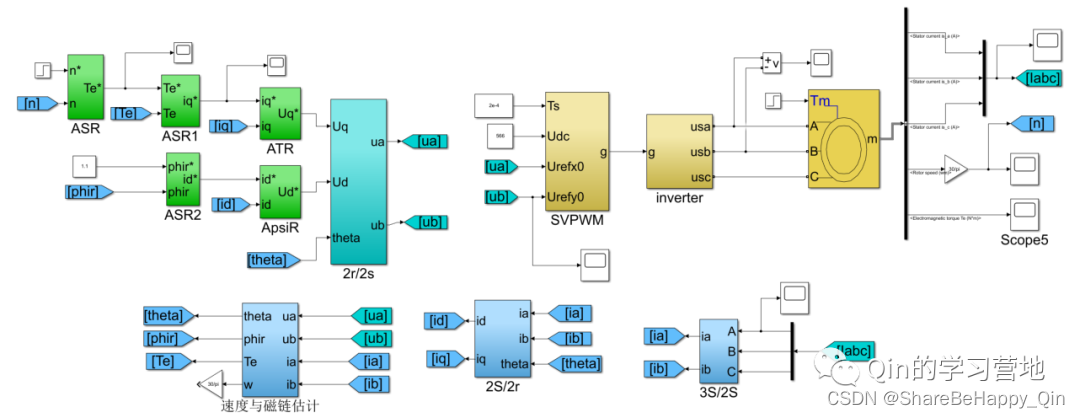
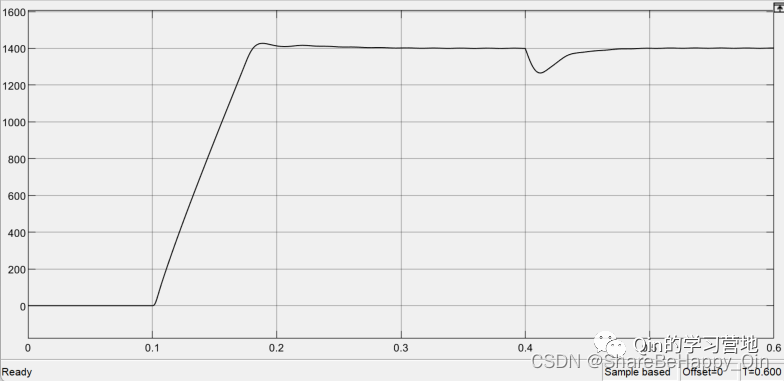
需要仿真的同学请关注【Qin的学习营地】

这篇关于三相异步电机动态数学模型推导及矢量控制仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






