异步电机专题



三相异步电机动态数学模型推导及矢量控制仿真
文章目录 **原文链接,点击跳转**三相异步电机动态数学模型及矢量控制仿真1、异步电机三相方程2、坐标变换3、磁链3/2变换推导4、两相静止坐标系下的方程5、两相旋转坐标系下的方程6、以 ω-is-Ψr 为状态变量的状态方程7、矢量控制及 matlab 仿真 原文链接,点击跳转 三相异步电机动态数学模型及矢量控制仿真 本文带你一步步推倒三相异步电机动态数学模型,按基于转子磁链
异步电机模型预测电流控制(MPCC)
导读:本期主要是介绍模型预测电流控制。模型预测电流控制主要包括:转速环、磁链环、磁链观测器、预测模型和代价函数。 如果需要MPCC模型,关注微信公众号:浅谈电机控制,获取。 图1异步电机模型预测电流控制系统的结构框图 异步电机模型预测电流控制系统的结构框图如图1所示。该控制系统与传统的FOC 控制系统相比,利用模型预测电流控制单环电流控制器替代了传统矢量控制的两个电流内环和电压调制环
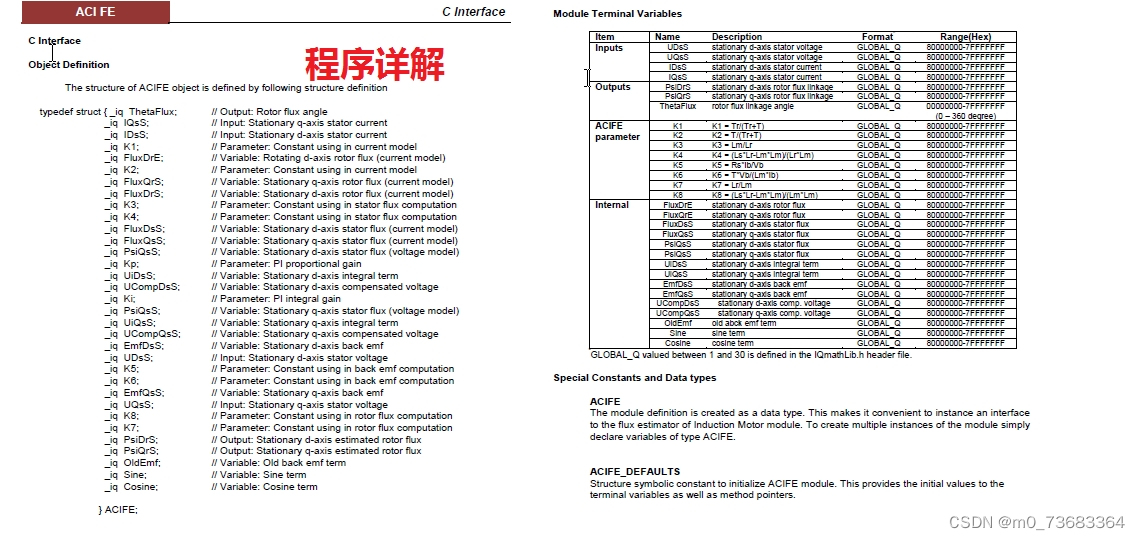
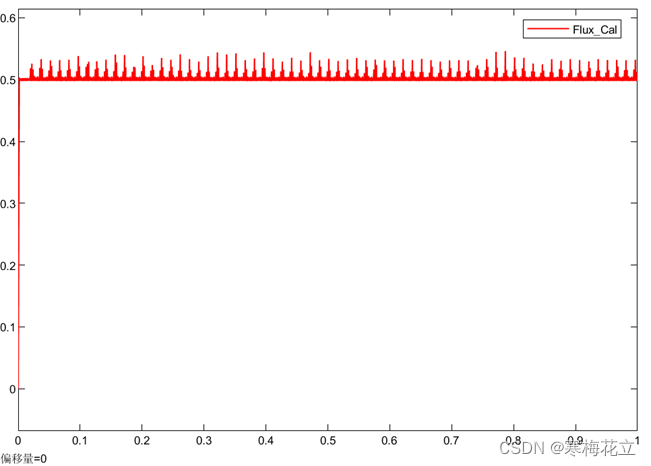
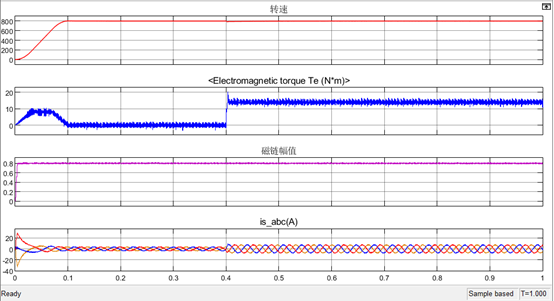
感应异步电机的无传感器矢量控制TMS320F28335,完整的C代码+仿真模型 基于“电压模型+电流模型”的磁链观测器
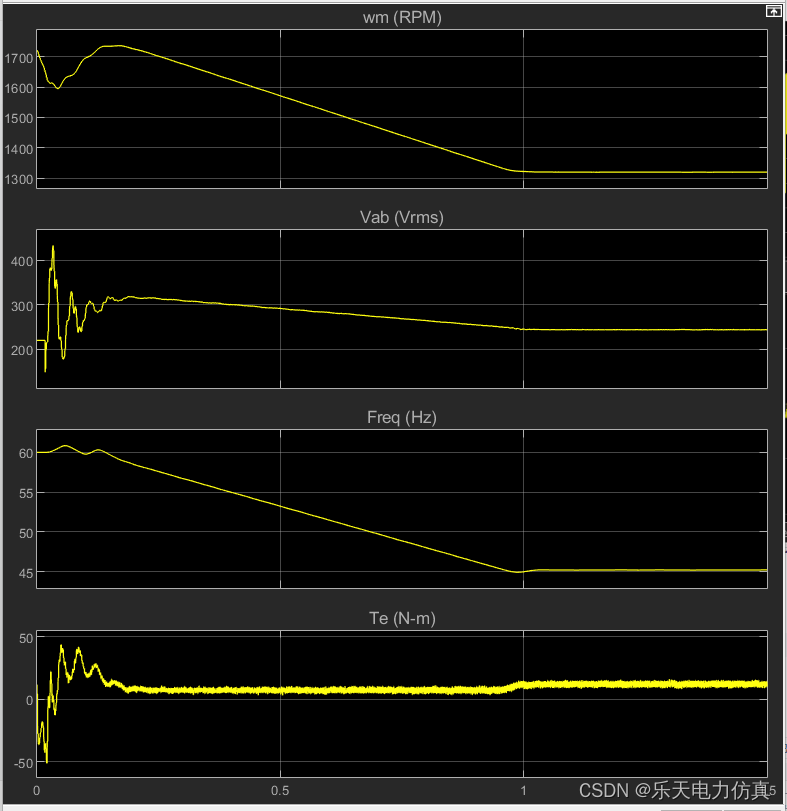
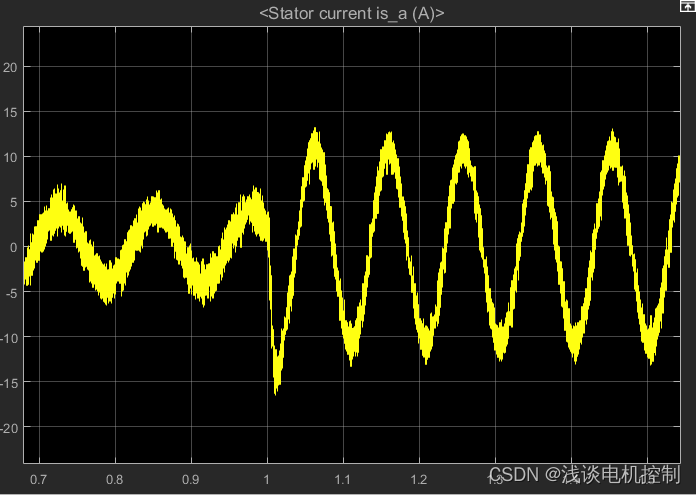
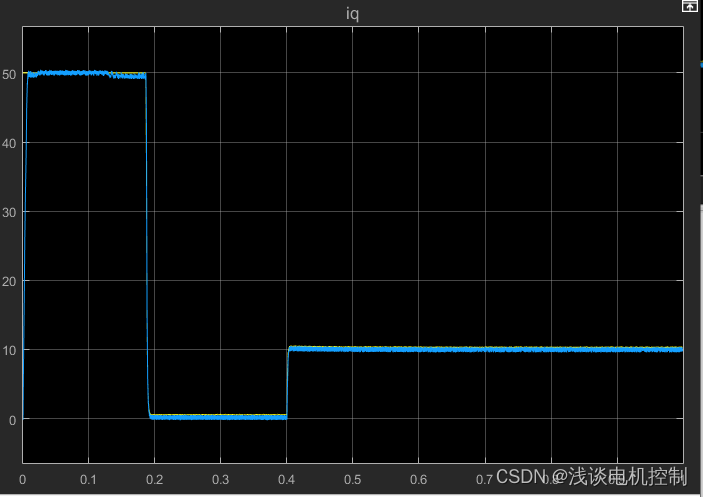
感应异步电机的无传感器,完整的C代码+仿真模型: 基于“电压模型+电流模型”的磁链观测器,实现转子磁场定向控制(FOC),可实现电机在低速、中高速段的高精度的转速估算; 代码已经成功移植到DSP芯片(TMS320F28335)和STM32F107中,对一台额定功率为33kW的异步电机进行了无传感器矢量控制,波形和试验台架数据见下图。可实现电机带满载零速启动,抗负载扰动性强,响应速度快,控制精度高
异步电机无差拍电流预测矢量控制
导读:本期文章主要介绍异步电机无差拍电流预测矢量控制,与传统的异步电机PI调节的矢量控制作对比。 如果需要文章中的无差拍电流预测矢量控制的仿真模型,可关注微信公众号:浅谈电机控制,获取。 图1 感应电机无差拍预测电流控制系统 一、传统PI调节器的控制原理 图2 PI控制框图 传统的异步电机矢量控制的参考电压获取是通过两个PI电流内环获取的,其数学表达式如式(1)所示。
异步电机直接转矩控制学习(两电平12扇区)
导读:传统的直接转矩控制方法6扇区电压矢量选择会导致磁链控制不对称、转矩脉动大等问题,本期介绍一种把扇区细分为12扇区的新型三相异步电机直接转矩控制方法,仿真结果证明磁链轨迹、转速及转矩脉动明显变小,异步电机三相定子电流波形更加圆滑,更加接近于正弦波形。如果需要文章中的仿真模型,关注微信公众号:浅谈电机控制,留言获取。 如果需要文章中的仿真模型,关注微信公众号:浅谈电机控制,留言获取。 一