本文主要是介绍信号与线性系统翻转课堂笔记4——连续LTI系统的微分方程模型与求解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
信号与线性系统翻转课堂笔记4——连续LTI系统的微分方程模型与求解
The Flipped Classroom4 of Signals and Linear Systems
对应教材:《信号与线性系统分析(第五版)》高等教育出版社,吴大正著
一、要点
(1)连续LTI系统的微分方程模型及其经典解,了解齐次解+特解的微分方程求解方法;
(2)系统响应的分解:掌握自由(固有)响应/强迫响应、瞬态响应/稳态响应、零输入响应/零状态响应的概念,能够熟练完成系统响应的分解;
(3,重点)0-和0+初始值问题,了解系统初始状态在0时刻产生突变的原因,熟练掌握0+初始值的求解方法;系统微分方程的算子表示法;
(4,重点)系统零输入响应和零状态响应的分别求解,熟练掌握求解方法。
二、问题与解答
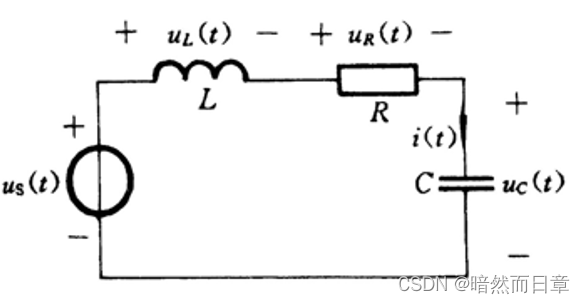
1、系统自由响应为什么又被称为固有响应,这种时域响应的模态(随时间的变化规律)主要取决于什么?它与系统外加的输入激励有没有关系?预备训练一的RLC电路,C1取两种不同值的情况下,所得到系统微分方程的特征根有什么不同(列出系统微分方程并求出其特征根)?这种不同对于系统的自由响应模态有何影响?二阶电路(如RLC电路)的过阻尼、欠阻尼、临界阻尼、无阻尼分别对应于特征根的何种情形?
2、试分析以下几个论断的正误:①零输入响应一定是自由响应;②自由响应一定是零输入响应;③零状态响应一定是强迫响应;④零状态响应包括自由响应和强迫响应。
3、为什么“微分方程等号右端含有冲激函数及其各阶导数时,响应y(t)及其各阶导数由0-到0+的瞬间将发生跃变”(教材p45),这反映了冲激或者冲激偶所具有的何种特性?
4、求解教材课后习题2.2(4),据此总结求0-到0+跃变的方法和步骤,特别注意与教材例2.1-3、2.1-4进行比较,说明如何确定等号右端冲激的阶次与等号左端y(t)的最高阶次的对应关系。
5、求解教材课后习题2.4(2),其中零状态响应分别用常规方法(教材例2.1-5方法)和微分特性(教材例2.1-6方法)这两种方法求解,并分别指出全响应中的自由响应/强迫响应、稳态响应/暂态响应。
6、动态系统的时域响应,可以理解为系统输出跟随输入指令,从一种状态到另一种状态的转换(例如数字电路中0、1电平的转换)。对于实际的物理系统来说,这种转换总是需要花费一定的时间的(转换不可能瞬时完成,需要一个过渡过程),而不能突变(思考:前面第3个讨论题所分析的0-到0+跃变,为什么在实际物理系统中不可能发生?)。针对预备训练一的RLC电路在方波输入激励下的响应(输出),从输出反应的速度、一个稳态到另一个稳态所用时间、输出过冲(超调)量大小等几个方面,比较分析电路工作于欠阻尼、过阻尼这两种状态,其过渡过程各自的特点。
1、系统的自由响应
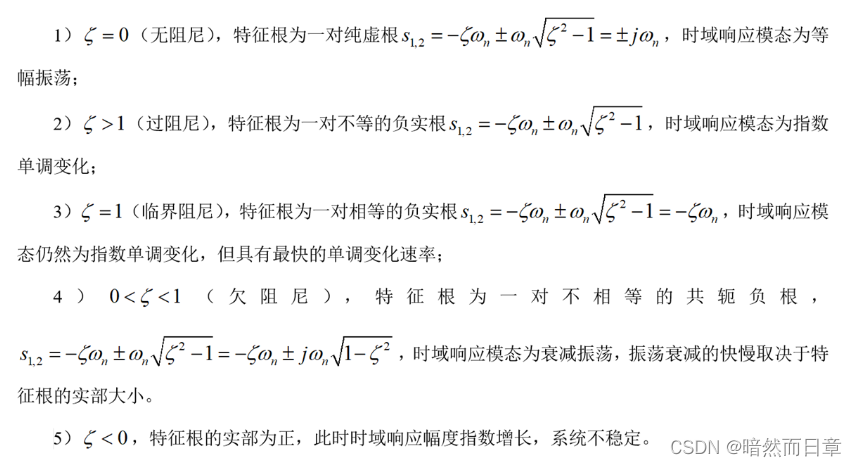
系统自由响应为什么又被称为固有响应,这种时域响应的模态(随时间的变化规律)主要取决于什么?它与系统外加的输入激励有没有关系?(第1问)预备训练一的RLC电路,C1取两种不同值的情况下,所得到系统微分方程的特征根有什么不同(列出系统微分方程并求出其特征根)?这种不同对于系统的自由响应模态有何影响?(第2问)二阶电路(如RLC电路)的过阻尼、欠阻尼、临界阻尼、无阻尼分别对应于特征根的何种情形?(第3问)
(1)动态电路的完全响应中,已由初始条件确定待定系数k的微分方程通解部分,称为电路系统的自由响应。它的函数形式由电路系统本身结构决定,与外加激励无关,所以也称为固有响应。
(2)
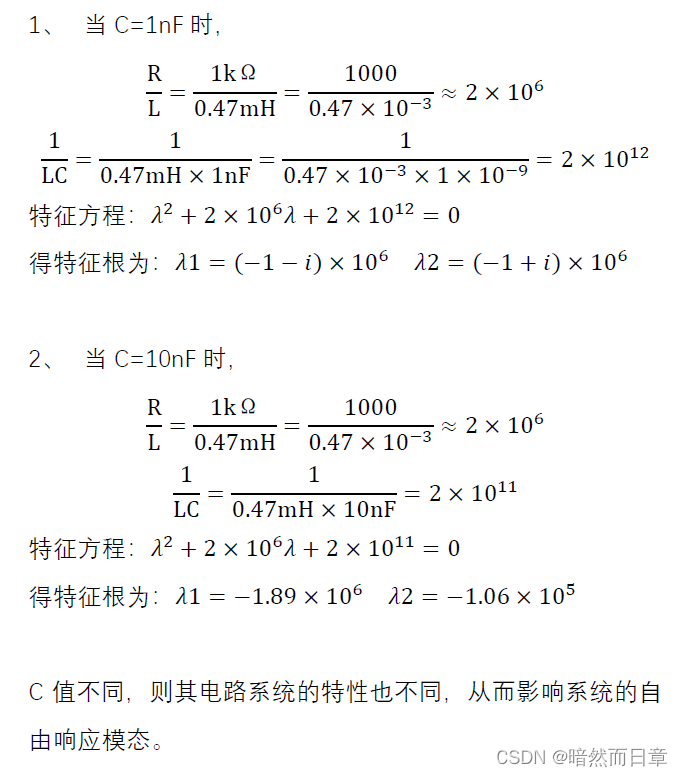
(3)
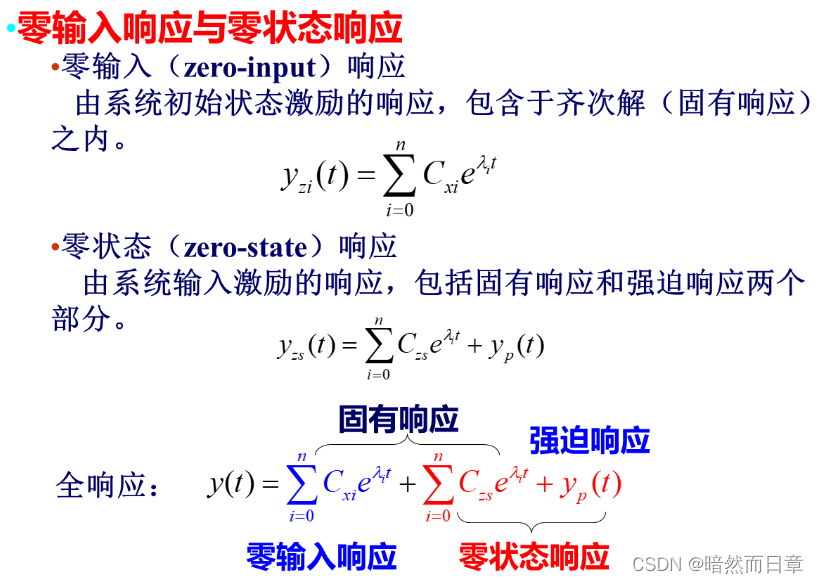
2、各类响应的关系
试分析以下几个论断的正误:①零输入响应一定是自由响应;②自由响应一定是零输入响应;③零状态响应一定是强迫响应;④零状态响应包括自由响应和强迫响应。
(1)对
(2)错
(3)错
(4)对
(自由响应=固有响应)
3、冲激函数的特性
为什么“微分方程等号右端含有冲激函数及其各阶导数时,响应y(t)及其各阶导数由0-到0+的瞬间将发生跃变”(教材p45),这反映了冲激或者冲激偶所具有的何种特性?
0-是零输入时的初始状态,初始值是由系统的储能决定的;0+是加了输入后的初始状态,初始值受储能与激励的双重影响。
作用时间无穷小,反映了冲激或者冲激偶的瞬时特性。
4、初值求解问题
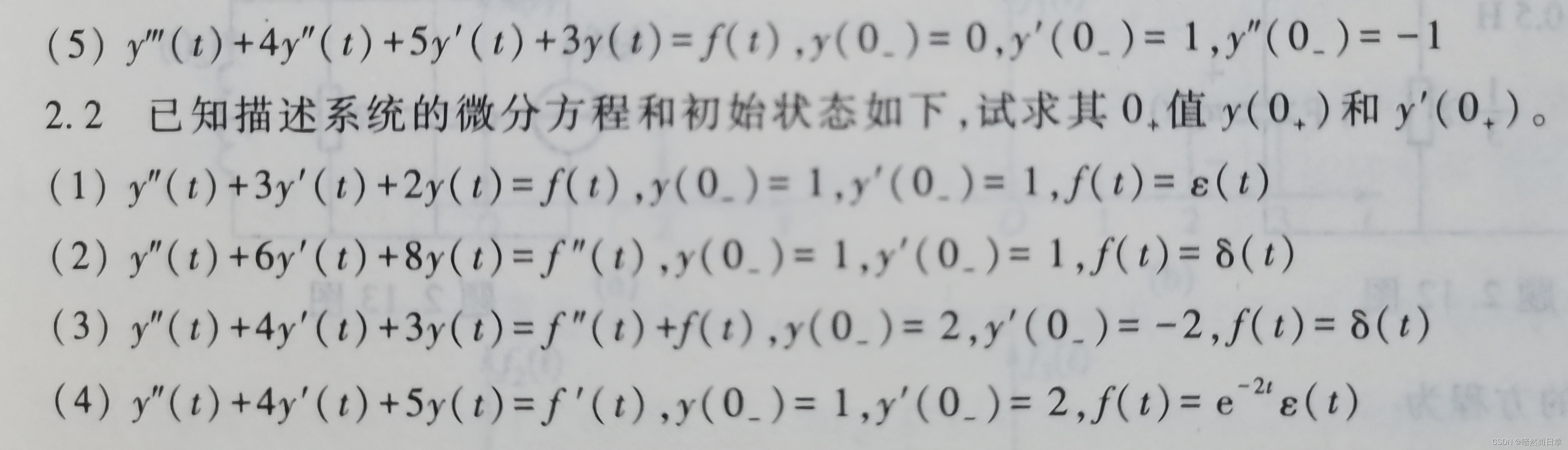
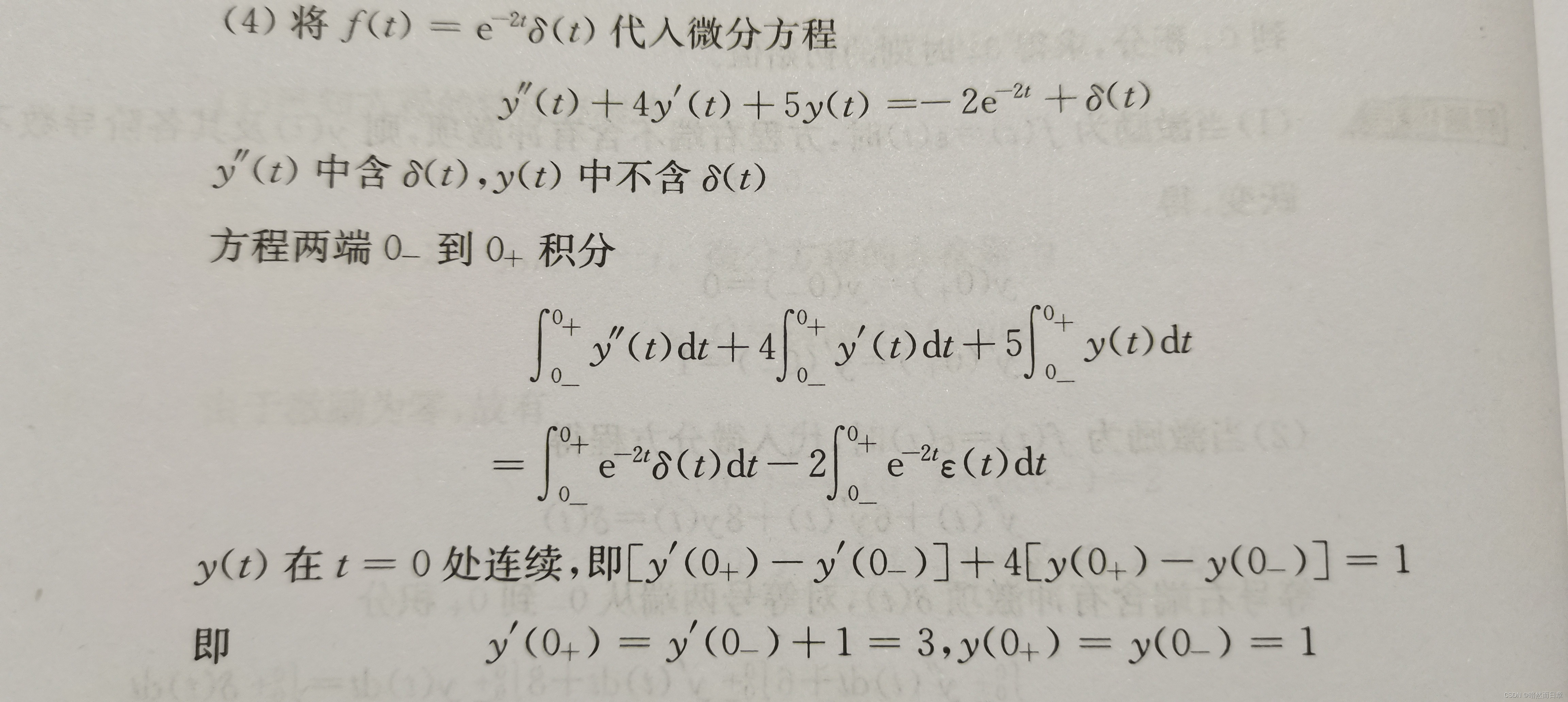
求解教材课后习题2.2(4),据此总结求0-到0+跃变的方法和步骤,特别注意与教材例2.1-3、2.1-4进行比较,说明如何确定等号右端冲激的阶次与等号左端y(t)的最高阶次的对应关系。
等号右端冲激函数的最高阶导数阶次与等号左端y(t)的最高导数阶次相等。
系统中从0-到0+有无跳变取决于微分方程右端是否包含冲激函数及其各阶导数,如果包含即发生了跳变,用冲激函数匹配法求出0+状态,冲激函数匹配法是根据t=0时刻微分方程左右两端的冲激函数及其各阶导数应该平衡等。
1、找最高阶,右端δ(t)最高阶对应左端最高阶。
2、由高到低列式子,直到出现阶跃信号u(t)。
3、把第二步列的式子带入到微分方程,系统进行匹配。
4、找出阶数对应的跳变值,r(k)(0+)=r(k)(0-)+跳变值。
5、零输入响应、零状态响应与全响应求解问题
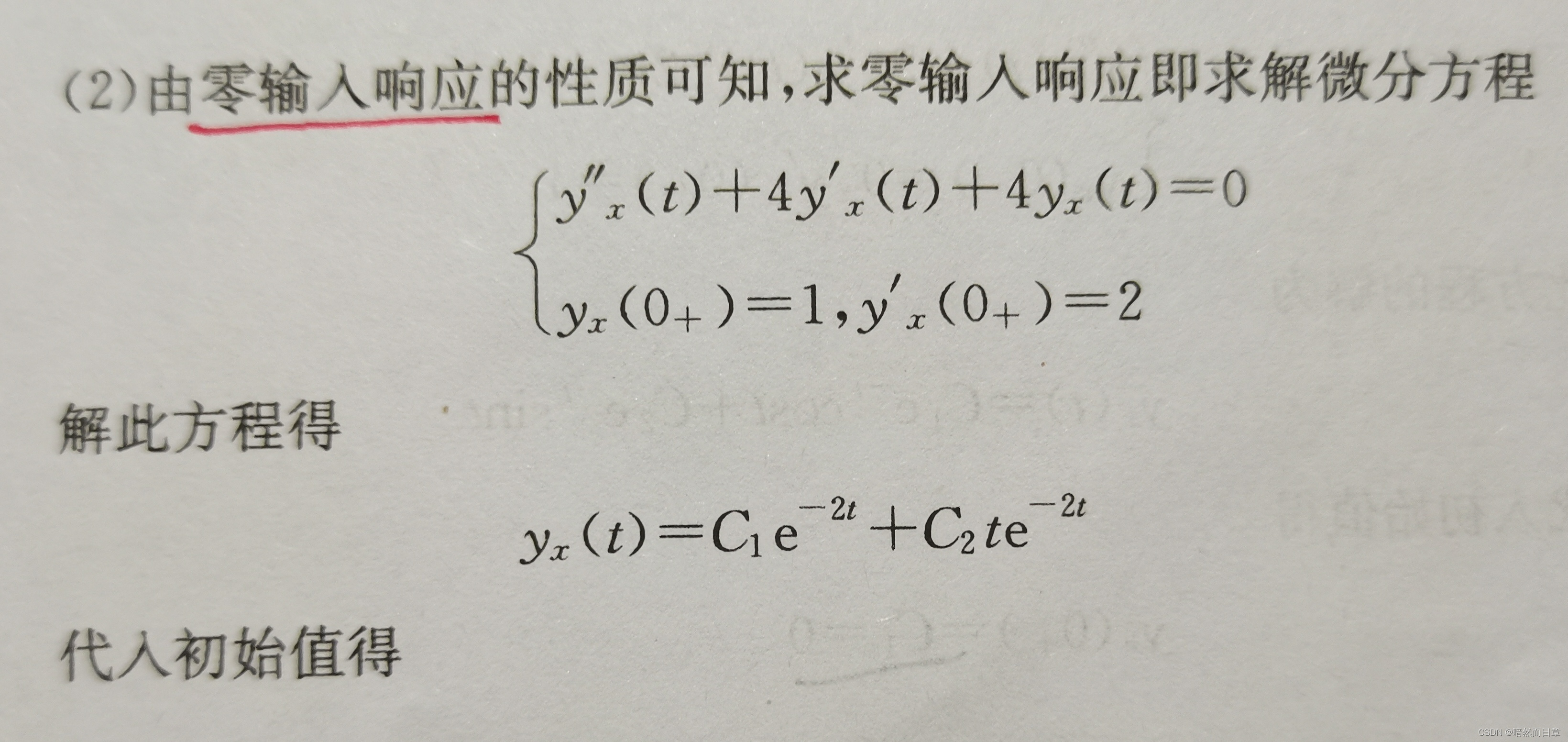
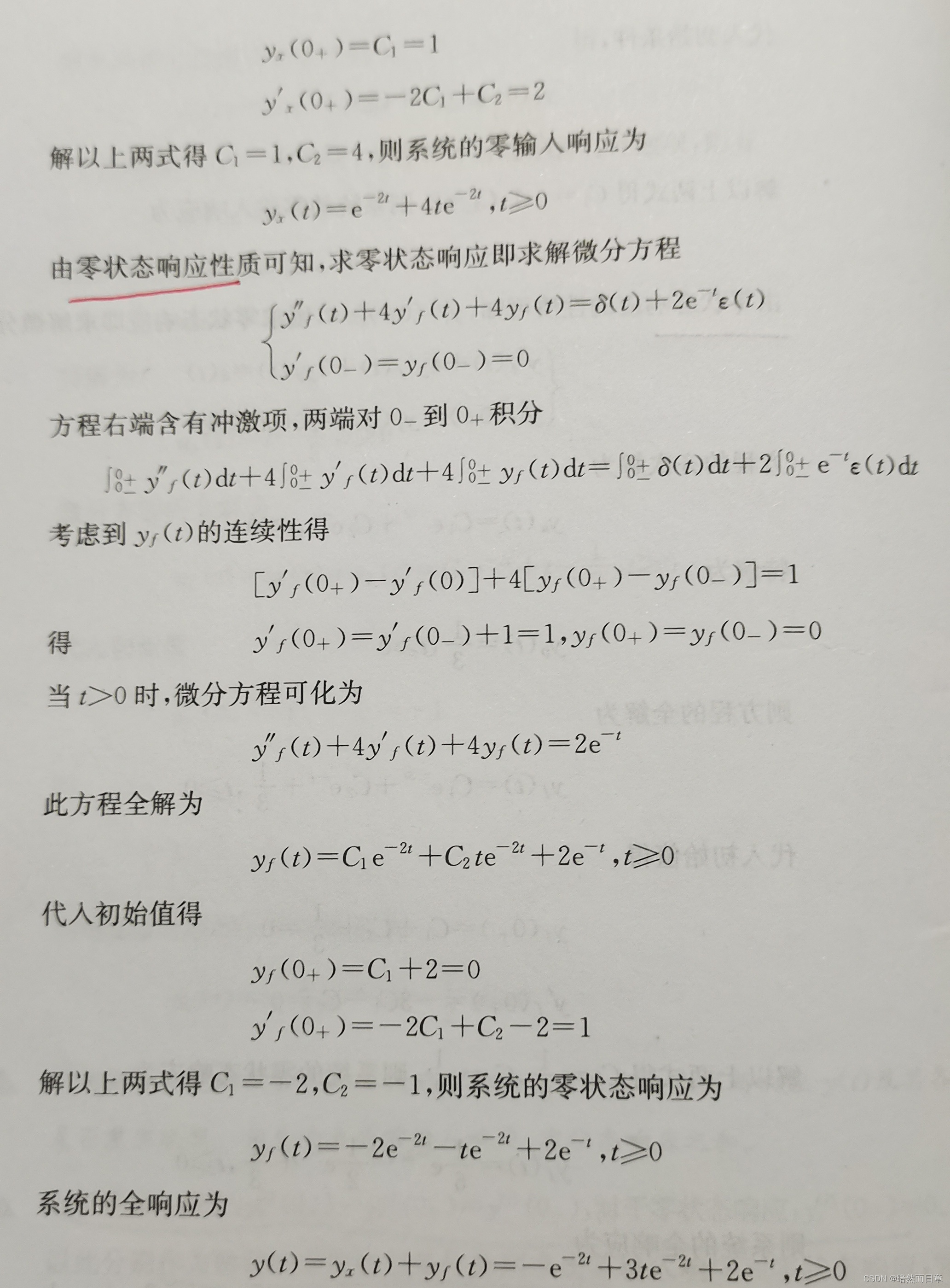
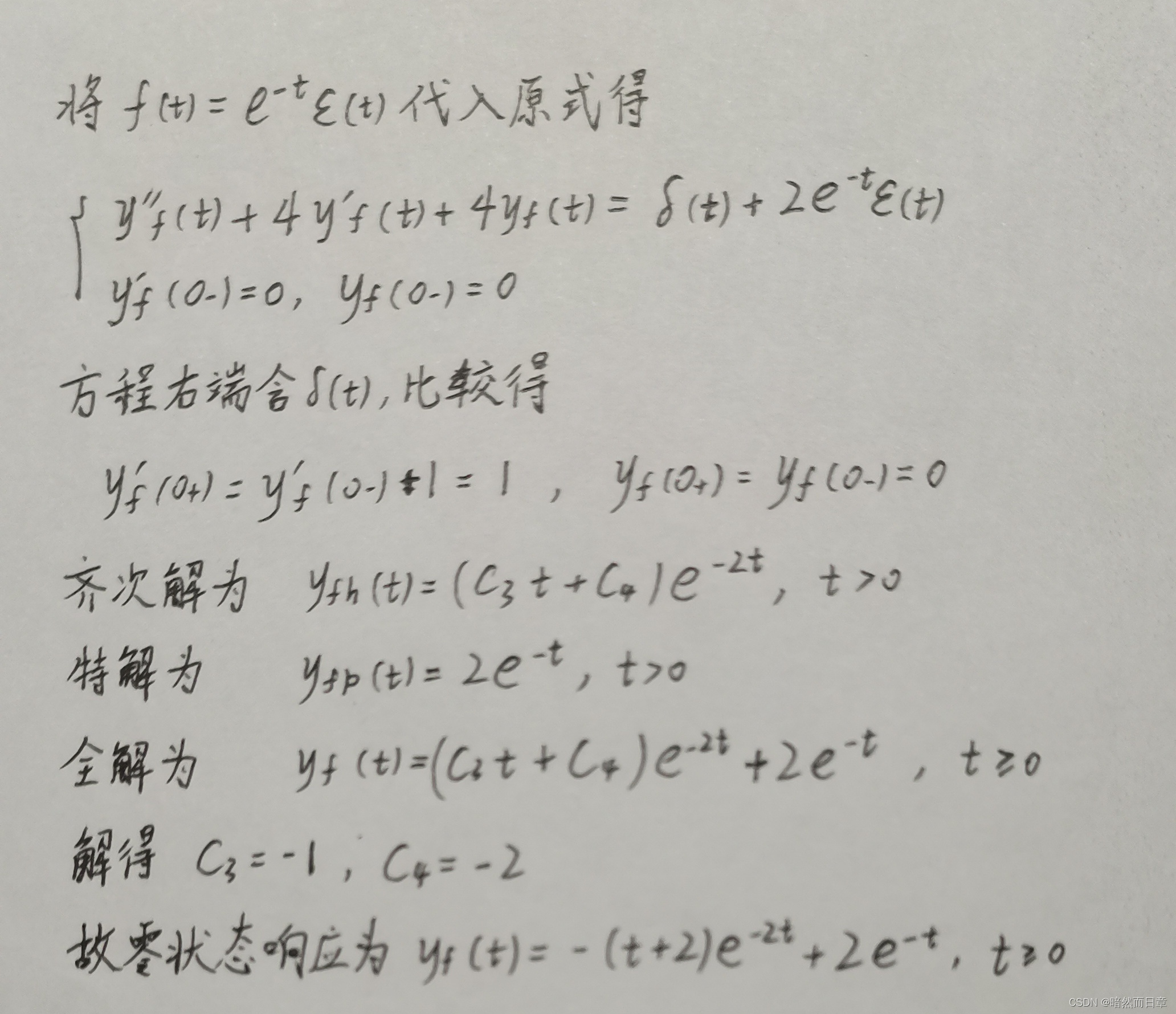
求解教材课后习题2.4(2),其中零状态响应分别用常规方法(教材例2.1-5方法)和微分特性(教材例2.1-6方法)这两种方法求解,并分别指出全响应中的自由响应/强迫响应、稳态响应/暂态响应。

零状态响应用常规方法求解:
零状态响应部分用微分特性求解:
6、实际物理系统的响应过渡过程
动态系统的时域响应,可以理解为系统输出跟随输入指令,从一种状态到另一种状态的转换(例如数字电路中0、1电平的转换)。对于实际的物理系统来说,这种转换总是需要花费一定的时间的(转换不可能瞬时完成,需要一个过渡过程),而不能突变(思考:前面第3个讨论题所分析的0-到0+跃变,为什么在实际物理系统中不可能发生?(第一问))。针对预备训练一的RLC电路在方波输入激励下的响应(输出),从输出反应的速度、一个稳态到另一个稳态所用时间、输出过冲(超调)量大小等几个方面,比较分析电路工作于欠阻尼、过阻尼这两种状态,其过渡过程各自的特点。(第二问)
(1)从0-到0+是一种理想化的数学模型,现实中无法产生,因为需要满足冲激信号幅度无穷大,瞬时功率无穷大,变化速度无穷大。
(2)
一个系统受初扰动后不再受外界激励,因受到阻力造成能量损失而位移峰值渐减的振动称为阻尼振动。
欠阻尼:如果负载阻抗大于传输线的特性阻抗,那么负载端多余的能量就会反射回源端,由于负载端没有吸收全部能量,故称这种情况为欠阻尼。
输出反应的速度快、一个稳态到另一个稳态所用时间长、输出过冲(超调)量大。
过阻尼:如果负载阻抗小于传输线的特性阻抗,那么负载试图消耗比当前源端提供的能量更多的能量,故反射回来通知源端输送更多的能量,故称这种情况为过阻尼。
输出反应的速度慢、一个稳态到另一个稳态所用时间短、输出过冲(超调)量小。
三、反思总结
暂无
这篇关于信号与线性系统翻转课堂笔记4——连续LTI系统的微分方程模型与求解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







