本文主要是介绍OpenCV图像特征提取学习二,Shi-Tomasi 角点检测算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一.Shi-Tomasi 角点检测算法
Harris角点检测基本数学公式如下:
泰勒公式进行展开后,近似为:
对于局部微小的移动量,可以近似得到下面的表达:
其中M为2*2的矩阵,可由图像的导数求得:
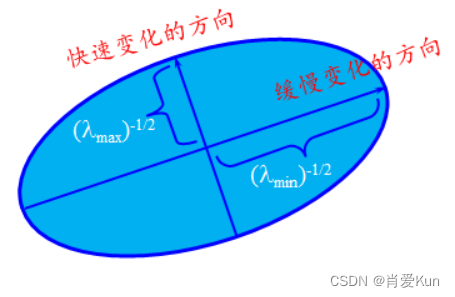
矩阵M,将其对角化之后 ,特征值λ1, λ2 分别代表了X 和Y 方向的灰度变化率.
的椭圆形式如下:
Harris角点检测算法的角点响应函数为:
Harris角点检测算法就是对角点响应函数R进行阈值处理:R > threshold,即提取R的局部极大值。shi-Tomasi 算法是基于Harris 算法进行的改进,Harris算法最基础的数学定义是将矩阵 M 的行列式值与矩阵 M 的迹相减,再将差值与预先给定的阈值进行比较。若两个特征值中较小的一个大于最小阈值,则会得到强角点,这就是Shi-Tomasi角点检测算法。
Shi-Tomasi角点检测算法的角点响应函数为:
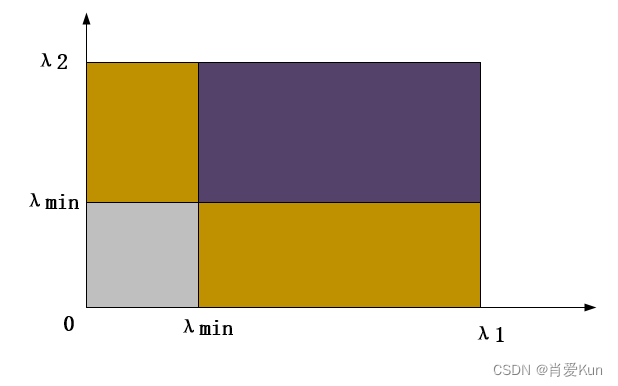
Shi-tomasi角点检测 和Harris 算法一样,如果该分数大于设定的阈值,我们就认为它是一个角点。可以看出来只有当 λ1 和 λ 2 都大于最小值时,才被认为是角点,即下图中的紫色区域。
--------------------------------------------------------------------------------------------------------------------------------
二.Shi-Tomasi角点检测API函数接口
void goodFeaturesToTrack
( InputArray image, OutputArray corners,int maxCorners, double qualityLevel, double minDistance,InputArray mask=noArray(), int blockSize=3,bool useHarrisDetector=false, double k=0.04 );参数说明:
第一个参数image:输入图像,8位或浮点32比特,单通道图像;
第二个参数corners:输出参数,检测到的角点;表示返回角点的数目,如果检测出来角点数目大于最大数目则返回响应值最强前规定数目;
第三个参数corner_count:输出参数,检测到的角点数目;
第四个参数quality_level:最大最小特征值的乘法因子。定义可接受图像角点的最小质量因子;
第五个参数min_distance:限制因子。得到的角点的最小距离;使用 Euclidian 距离;
第六个参数mask:ROI感兴趣区域。函数在ROI中计算角点;如果 mask 为 NULL,则选择整个图像;
第七个参数block_size: 是计算导数的自相关矩阵时指定点的领域,采用小窗口计算的结果比单点 (也就是block_size为1)计算的结果要好;
第八个参数useHarrisDetector:当use_harris的值为非0,则函数使用Harris的角点定义;若为 0,则使用Shi-Tomasi的定义;
第九个参数K:用于设置Hessian自相关矩阵即对Hessian行列式的相对权重的权重系数;
---------------------------------------------------------------------------------------------------------------------------------
代码实现
#include"stdafx.h"
#include <opencv2/opencv.hpp>
#include <iostream>#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>using namespace cv;
using namespace std;#define WIN_NAME "Shi-Tomasi角点检测"Mat srcImage, grayImage;
int maxCornerNumber = 33;
int maxTrackbarNumber = 500;
RNG rng(12345);void on_GoodFeatureToTrack(int, void *)
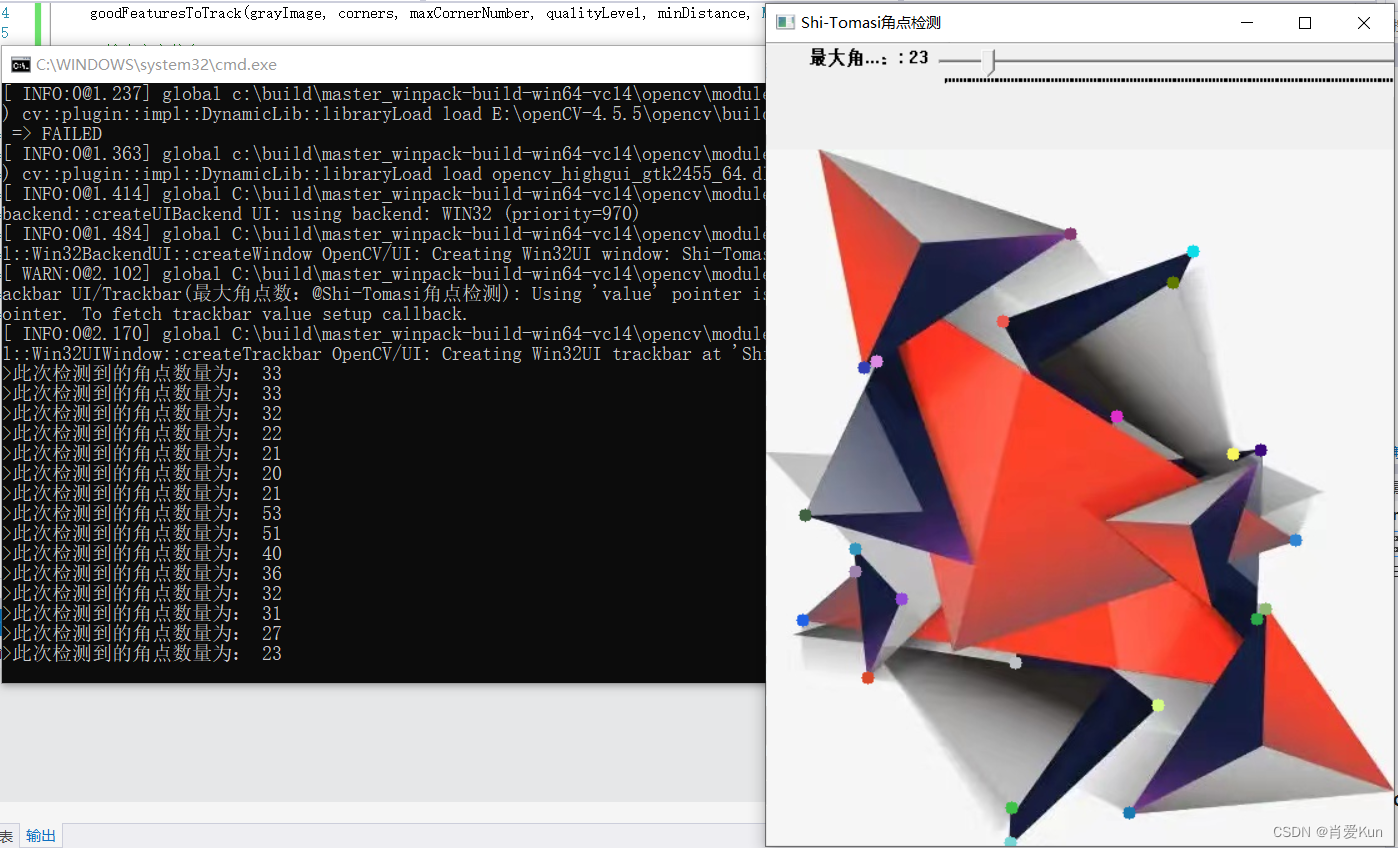
{if (maxCornerNumber <= 1){maxCornerNumber = 1;}//Shi-Tomasi参数准备vector<Point2f> corners;double qualityLevel = 0.01; //角点检测可以接受的最小特征值double minDistance = 10; //角点间的最小像素距离设置int blockSize = 3; //计算导数自相关矩阵时指定的领域范围double k = 0.04; //权重系数Mat copy = srcImage.clone(); //复制原图到一个临时变量中,作为感兴趣区域//Shi-Tomasi TestgoodFeaturesToTrack(grayImage, corners, maxCornerNumber, qualityLevel, minDistance, Mat(), blockSize, false, k);//输出文字信息cout << ">此次检测到的角点数量为: " << corners.size() << endl;//绘制检测到的角点for (unsigned int i = 0; i < corners.size(); i++){circle(copy, corners[i], 5, Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), -1, 8, 0);}imshow(WIN_NAME, copy);
}int main(int argc, char** argv)
{srcImage = imread("F:/photo/lj.jpg");cvtColor(srcImage, grayImage, COLOR_BGR2GRAY);namedWindow(WIN_NAME, WINDOW_AUTOSIZE);createTrackbar("最大角点数:", WIN_NAME, &maxCornerNumber, maxTrackbarNumber, on_GoodFeatureToTrack);//imshow(WIN_NAME, srcImage);on_GoodFeatureToTrack(0, 0);waitKey(0);return 0;
}
--------------------------------------------------------------------------------------------------------------------------------
图像处理效果
这篇关于OpenCV图像特征提取学习二,Shi-Tomasi 角点检测算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




